一种医疗外壳加工的可辅助定位的自动化生产线的制作方法
1.本发明涉及医疗外壳加工技术领域,具体为一种医疗外壳加工的可辅助定位的自动化生产线。
背景技术:
2.医疗设备是指单独或者组合使用于人体的仪器、设备、器具、材料或者其他物品,在对医疗设备中的一些仪器或者设备进行组装时会使用到医疗外壳,且在对医疗外壳进行加工时会使用自动化生产线,流水线式加工能够有效提高医疗外壳的加工效率。
3.现有的医疗外壳加工用的生产线不便对医疗外壳进行清理,以及不便在半封闭的环境下对医疗外壳进行视觉检测分类转送的问题,同时不能够对传送出现拥堵的医疗外壳进行再次的转送问题。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种医疗外壳加工的可辅助定位的自动化生产线,解决了上述背景技术中提出现有的医疗外壳加工用的生产线不便对医疗外壳进行清理,以及不便在半封闭的环境下对医疗外壳进行视觉检测分类转送的问题,同时不能够对传送出现拥堵的医疗外壳进行再次的转送问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种医疗外壳加工的可辅助定位的自动化生产线,包括主传送带和第二电动滑轨,所述主传送带外部的一端设置有辅助框,且辅助框内部的四角处安装有视觉检测框,所述辅助框外部的一端安装有前置框,且前置框的内部设置有用于清理医疗外壳的辅助组件,所述辅助框外部竖直面设置有滑板,且滑板的外部安装有防护板,所述辅助框外部的两端均设置有辅助板,且辅助板外部的一端设置有第一传送带,所述第一传送带底部的外部安装有第二传送带,所述辅助框底部的外部安装有支撑板,所述支撑板内部的一端安装有底置框,且底置框内部靠近主传送带的一端设置有用于破碎医疗外壳的调整组件,所述底置框底部的内部安装有限位槽,且限位槽的内部设置有拉板,所述底置框顶部的外部安装有底置挡板,所述第二电动滑轨位于底置挡板外部的两端,所述辅助框的内部设置有腔体。
6.可选的,所述腔体的内部设置有横向滑轨,且横向滑轨的中轴线处安装有纵向滑轨,所述纵向滑轨的底部滑动设置有电动推杆,且电动推杆底部的外部安装有第二液压气杆,所述第二液压气杆外部的两端转动连接有定位板。
7.可选的,所述横向滑轨和纵向滑轨之间呈“十”字形状分布,且横向滑轨和纵向滑轨与辅助框紧密贴合。
8.可选的,所述辅助板底部的外部设置有第一电动滑轨,且第一电动滑轨关于辅助框的中轴线对称设有两组。
9.可选的,所述辅助组件包括内置腔、伸缩杆、海绵、伸缩电机、连接管、水泵、挡板、第一液压气杆和连接杆,且内置腔内部的中部设置有伸缩电机,所述伸缩电机的底部安装
有伸缩杆,且伸缩杆的末端外部设置有海绵,所述内置腔底部外部的一端安装有挡板,且挡板外部的一端设置有连接杆,所述连接杆的上端安装有第一液压气杆,所述第一液压气杆外部靠近前置框的一端设置有水泵,且水泵外部的一端安装有连接管。
10.可选的,所述第一液压气杆与连接杆固定连接,且连接杆的底部与挡板紧密贴合,并且挡板与内置腔底部的外部滑动连接。
11.可选的,所述调整组件包括液压气缸、衔接板和转接挡板,且液压气缸外部的一端设置有衔接板,所述衔接板外部的一端安装有转接挡板。
12..根据权利要求所述的一种医疗外壳加工的可辅助定位的自动化生产线,其特征在于,所述转接挡板与衔接板卡合连接,且转接挡板与衔接板之间构成“l”型结构,并且衔接板外部的一端中轴线与液压气缸的中轴线相重合。
13.可选的,所述支撑板外部的靠近第二传送带的一端设置有转接框,且转接框的内部安装有连接槽,所述连接槽的内部设置有内置杆。
14.可选的,所述内置杆与连接槽转动连接,且连接槽外部的与转接框不在同一高度水平面。
15.本发明提供了一种医疗外壳加工的可辅助定位的自动化生产线,具备以下有益效果:
16.能够对医疗外壳进行自动的清理,且能够在对医疗外壳清理结束之后可对清理时用到的海绵进行清理,可多次使用,并且能够在半封闭的环境中对转送医疗外壳进行视觉检测处理,可根据医疗外壳的大小进行分类,以及破碎严重不能继续进行使用的医疗外壳可进行回收处理,同时能够对传送时医疗外壳较多出现拥堵时进行再次的传送处理,可在进行流水线加工时,能够根据使用需要对第二传送带进行适当的角度调整。
17.1.该一种医疗外壳加工的可辅助定位的自动化生产线,医疗外壳能够利用主传送带的设计进行统一的传送处理,且可在进行分类之前能够利用伸缩电机和伸缩杆的相互作用对海绵的高度进行适当的调整,通过对海绵高度的调整可适用于不同厚度的医疗外壳清理的问题,且可在清理结束之后能够利用再次利用伸缩电机和伸缩杆的相互作用把海绵收缩至内置腔内部,同步配合第一液压气杆和连接杆可对挡板进行移动,从而挡板可紧贴在内置腔底部外部,然后能够利用连接管和水泵的设计能够向内置腔注入适量的水,可通过伸缩电机的设计可使得海绵进行清洗,清洗结束之后可再次利用连接管和水泵的设计把水排出,通过海绵通过转动和挤压能够进行脱水处理,实现了自清洁的作用,便于再次对医疗外壳进行清理;
18.2.该一种医疗外壳加工的可辅助定位的自动化生产线,能够利用第二液压气杆的设计带动两个定位板进行距离的调整,以此能够对医疗外壳进行辅助定位处理,方便后续根据视觉检测需要进行分类转送处理,且横向滑轨和纵向滑轨之间呈“十”字形状分布的设计,能够根据检测需要根据设计路线快速转送至下一传送区域;
19.3.该一种医疗外壳加工的可辅助定位的自动化生产线,可在分类结束之后再次进行转送时,能够利用第一电动滑轨的设计对辅助板进行移动,从而可使得辅助框与第一传送带之间存在下料口,进而可对存在拥堵的医疗外壳重力传送至第二传送带的外部表面,有效对医疗外壳进行分流,减少单个传送带对医疗外壳传送时的工作压力;
20.4.该一种医疗外壳加工的可辅助定位的自动化生产线,能够在检测出破损严重的
医疗外壳时能够利用第二电动滑轨的设计对底置挡板进行位置的移动,从而能够把破损严重的医疗外壳垂直掉落至底置框的内部,可在掉落至一定的数量时,能够利用液压气缸的设计对衔接板和转接挡板进行推动,从而能够对底置框中的医疗外壳进行挤压处理,减少后续对破损严重的医疗外壳回收的占用面积,便于运输,并且衔接板和转接挡板连接结构和形状的设计能够根据使用需要选择合适的挤压形状;
21.5.该一种医疗外壳加工的可辅助定位的自动化生产线,能够在对医疗外壳进行疏堵或者再次分流之后,能够根据自动化流水线需要可利用转接框与连接槽之间的相互作用对与转接框相连接的第二传送带进行适当的角度的调整,便于第一传送带和第二传送带之间错位进行使用,方便使用者根据使用环境对物品进行拿取加工。
附图说明
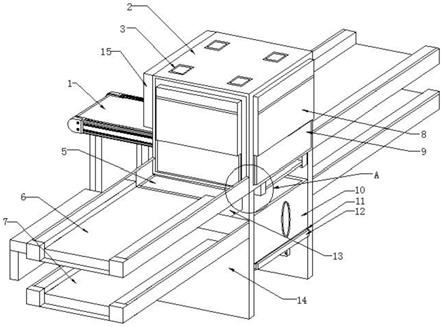
22.图1为本发明整体立体结构示意图;
23.图2为本发明前置框内部结构示意图;
24.图3为本发明辅助框内部局部结构示意图;
25.图4为本发明辅助板仰视局部安装结构示意图;
26.图5为本发明底置框俯视结构示意图;
27.图6为本发明转接框内部连接结构示意图;
28.图7为本发明图1中a处放大结构示意图。
29.图中:1、主传送带;2、辅助框;3、视觉检测框;4、辅助组件;401、内置腔;402、伸缩杆;403、海绵;404、伸缩电机;405、连接管;406、水泵;407、挡板;408、第一液压气杆;409、连接杆;5、辅助板;6、第一传送带;7、第二传送带;8、防护板;9、滑板;10、底置框;11、限位槽;12、拉板;13、转接框;14、支撑板;15、前置框;16、横向滑轨;17、纵向滑轨;18、腔体;19、电动推杆;20、定位板;21、第二液压气杆;22、第一电动滑轨;23、调整组件;2301、液压气缸;2302、衔接板;2303、转接挡板;24、连接槽;25、内置杆;26、底置挡板;27、第二电动滑轨。
具体实施方式
30.请参阅图1至图7,本发明提供技术方案:一种医疗外壳加工的可辅助定位的自动化生产线,包括主传送带1、辅助框2、视觉检测框3、辅助组件4、内置腔401、伸缩杆402、海绵403、伸缩电机404、连接管405、水泵406、挡板407、第一液压气杆408、连接杆409、辅助板5、第一传送带6、第二传送带7、防护板8、滑板9、底置框10、限位槽11、拉板12、转接框13、支撑板14、前置框15、横向滑轨16、纵向滑轨17、腔体18、电动推杆19、定位板20、第二液压气杆21、第一电动滑轨22、调整组件23、液压气缸2301、衔接板2302、转接挡板2303、连接槽24、内置杆25、底置挡板26、第二电动滑轨27,主传送带1外部的一端设置有辅助框2,且辅助框2内部的四角处安装有视觉检测框3,腔体18的内部设置有横向滑轨16,且横向滑轨16的中轴线处安装有纵向滑轨17,横向滑轨16和纵向滑轨17之间呈“十”字形状分布,且横向滑轨16和纵向滑轨17与辅助框2紧密贴合,纵向滑轨17的底部滑动设置有电动推杆19,且电动推杆19底部的外部安装有第二液压气杆21,第二液压气杆21外部的两端转动连接有定位板20,辅助框2外部的一端安装有前置框15,且前置框15的内部设置有用于清理医疗外壳的辅助组件4,辅助框2外部竖直面设置有滑板9,且滑板9的外部安装有防护板8,辅助框2外部的两端
均设置有辅助板5,且辅助板5外部的一端设置有第一传送带6,第一传送带6底部的外部安装有第二传送带7,辅助框2底部的外部安装有支撑板14,支撑板14内部的一端安装有底置框10,且底置框10内部靠近主传送带1的一端设置有用于破碎医疗外壳的调整组件23,底置框10底部的内部安装有限位槽11,且限位槽11的内部设置有拉板12,底置框10顶部的外部安装有底置挡板26,第二电动滑轨27位于底置挡板26外部的两端,辅助框2的内部设置有腔体18;
31.具体操作如下,首先能够根据所需进行使用所需对滑板9在防护板8的内部进行上下滑动,从而可使得辅助框2医疗外壳传送区域暴露出来,医疗外壳传送位置选择结束之后,医疗外壳能够利用主传送带1的设计进行统一的传送处理,然后医疗外壳会统一传送至辅助框2的内部,能够利用第二液压气杆21的设计带动两个定位板20进行距离的调整,以此能够对医疗外壳进行辅助定位处理,然后可利用辅助框2中的辅助框2对医疗外壳进行检测,检测结束之后,方便后续根据视觉检测结果进行分类转送处理,且横向滑轨16和纵向滑轨17之间呈“十”字形状分布的设计,能够根据检测需要根据设计路线快速转送至下一传送区域,接着能够利用第一传送带6和第二传送带7进行再次的转送处理,以及能够对破碎严重不能继续进行使用的医疗外壳利用底置框10可进行回收处理,同时能够对传送时医疗外壳较多出现拥堵时进行再次的传送处理,可在进行流水线加工时,能够根据使用需要对第二传送带7进行适当的角度调整。
32.如图1和图4所示,辅助板5底部的外部设置有第一电动滑轨22,且第一电动滑轨22关于辅助框2的中轴线对称设有两组;
33.可在分类结束之后再次进行转送时,能够利用第一电动滑轨22的设计对辅助板5进行移动,从而可使得辅助框2与第一传送带6之间存在下料口,进而可对存在拥堵的医疗外壳重力传送至第二传送带7的外部表面,有效对医疗外壳进行分流,减少单个传送带对医疗外壳传送时的工作压力。
34.如图1和图2所示,辅助组件4包括内置腔401、伸缩杆402、海绵403、伸缩电机404、连接管405、水泵406、挡板407、第一液压气杆408和连接杆409,且内置腔401内部的中部设置有伸缩电机404,伸缩电机404的底部安装有伸缩杆402,且伸缩杆402的末端外部设置有海绵403,内置腔401底部外部的一端安装有挡板407,且挡板407外部的一端设置有连接杆409,连接杆409的上端安装有第一液压气杆408,第一液压气杆408外部靠近前置框15的一端设置有水泵406,且水泵406外部的一端安装有连接管405,第一液压气杆408与连接杆409固定连接,且连接杆409的底部与挡板407紧密贴合,并且挡板407与内置腔401底部的外部滑动连接;
35.医疗外壳能够利用主传送带1的设计进行统一的传送处理,且可在进行分类之前能够利用伸缩电机404和伸缩杆402的相互作用对海绵403的高度进行适当的调整,通过对海绵403高度的调整可适用于不同厚度的医疗外壳清理的问题,且可在清理结束之后能够利用再次利用伸缩电机404和伸缩杆402的相互作用把海绵403收缩至内置腔401内部,同步配合第一液压气杆408和连接杆409可对挡板407进行移动,从而挡板407可紧贴在内置腔401底部外部,然后能够利用连接管405和水泵406的设计能够向内置腔401注入适量的水,可通过伸缩电机404的设计可使得海绵403进行清洗,清洗结束之后可再次利用连接管405和水泵406的设计把水排出,通过海绵403通过转动和挤压能够进行脱水处理,实现了自清
洁的作用,便于再次对医疗外壳进行清理。
36.如图1和图5所示,调整组件23包括液压气缸2301、衔接板2302和转接挡板2303,且液压气缸2301外部的一端设置有衔接板2302,衔接板2302外部的一端安装有转接挡板2303,转接挡板2303与衔接板2302卡合连接,且转接挡板2303与衔接板2302之间构成“l”型结构,并且衔接板2302外部的一端中轴线与液压气缸2301的中轴线相重合;
37.能够在检测出破损严重的医疗外壳时能够利用第二电动滑轨27的设计对底置挡板26进行位置的移动,从而能够把破损严重的医疗外壳垂直掉落至底置框10的内部,可在掉落至一定的数量时,能够利用液压气缸2301的设计对衔接板2302和转接挡板2303进行推动,从而能够对底置框10中的医疗外壳进行挤压处理,减少后续对破损严重的医疗外壳回收的占用面积,便于运输,并且衔接板2302和转接挡板2303连接结构和形状的设计能够根据使用需要选择合适的挤压形状。
38.如图1和图6所示,支撑板14外部的靠近第二传送带7的一端设置有转接框13,且转接框13的内部安装有连接槽24,连接槽24的内部设置有内置杆25,内置杆25与连接槽24转动连接,且连接槽24外部的与转接框13不在同一高度水平面;
39.能够在对医疗外壳进行疏堵或者再次分流之后,能够根据自动化流水线需要可利用转接框13与连接槽24之间的相互作用对与转接框13相连接的第二传送带7进行适当的角度的调整,便于第一传送带6和第二传送带7之间错位进行使用,方便使用者根据使用环境对物品进行拿取加工。
40.综上,该一种医疗外壳加工的可辅助定位的自动化生产线,使用时,首先能够根据所需进行使用所需对滑板9在防护板8的内部进行上下滑动,从而可使得辅助框2医疗外壳传送区域暴露出来,医疗外壳传送位置选择结束之后,医疗外壳能够利用主传送带1的设计进行统一的传送处理,然后医疗外壳能够利用主传送带1的设计进行统一的传送处理,且可在进行分类之前能够利用伸缩电机404和伸缩杆402的相互作用对海绵403的高度进行适当的调整,通过对海绵403高度的调整可适用于不同厚度的医疗外壳清理的问题,且可在清理结束之后能够利用再次利用伸缩电机404和伸缩杆402的相互作用把海绵403收缩至内置腔401内部,同步配合第一液压气杆408和连接杆409可对挡板407进行移动,从而挡板407可紧贴在内置腔401底部外部,然后能够利用连接管405和水泵406的设计能够向内置腔401注入适量的水,可通过伸缩电机404的设计可使得海绵403进行清洗,清洗结束之后可再次利用连接管405和水泵406的设计把水排出,通过海绵403通过转动和挤压能够进行脱水处理,实现了自清洁的作用,便于再次对医疗外壳进行清理,接着医疗外壳会统一传送至辅助框2的内部,能够利用第二液压气杆21的设计带动两个定位板20进行距离的调整,以此能够对医疗外壳进行辅助定位处理,然后可利用辅助框2中的辅助框2对医疗外壳进行检测,检测结束之后,方便后续根据视觉检测结果进行分类转送处理,且横向滑轨16和纵向滑轨17之间呈“十”字形状分布的设计,能够根据检测需要根据设计路线快速转送至下一传送区域,接着可在分类结束之后再次进行转送时,能够利用第一电动滑轨22的设计对辅助板5进行移动,从而可使得辅助框2与第一传送带6之间存在下料口,进而可对存在拥堵的医疗外壳重力传送至第二传送带7的外部表面,有效对医疗外壳进行分流,减少单个传送带对医疗外壳传送时的工作压力,同时能够在检测出破损严重的医疗外壳时能够利用第二电动滑轨27的设计对底置挡板26进行位置的移动,从而能够把破损严重的医疗外壳垂直掉落至底置框10
的内部,可在掉落至一定的数量时,能够利用液压气缸2301的设计对衔接板2302和转接挡板2303进行推动,从而能够对底置框10中的医疗外壳进行挤压处理,减少后续对破损严重的医疗外壳回收的占用面积,便于运输,并且衔接板2302和转接挡板2303连接结构和形状的设计能够根据使用需要选择合适的挤压形状,最后能够在对医疗外壳进行疏堵或者再次分流之后,能够根据自动化流水线需要可利用转接框13与连接槽24之间的相互作用对与转接框13相连接的第二传送带7进行适当的角度的调整,便于第一传送带6和第二传送带7之间错位进行使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1