一种带有智能识别系统的货物分拣用机器人的制作方法
1.本发明涉及物流机器人技术领域,具体为一种带有智能识别系统的货物分拣用机器人。
背景技术:
2.随着电子商务的快速发展以及人们对于互联网的不断深入了解,网购已经成为一种主流的购物方式,使得人们能够足不出户的完成购物,网购的方式给人们的生活带来了很大的便利性。并且随着网购的普及,快递物流行业也在飞速发展,对于补足网络购物起到十分重要的作用。
3.由于技术的发展,目前物流行业的智能化、自动化程度越来越高,在包裹量年年剧增的情况下,利用物流机器人能够有效的减少人工成本,并且减少暴力递件、错件漏件情况的发生。分拣机器人主要用于货物的初步筛分分类,其上装配有传感器、物镜和电子光学系统等,能够配合寄件包裹上的条码,完成自动的货架摆放工作。
4.现在的分拣机器人具备移动能力,而地面上可以粘贴定位条码,对机器人的移动指引方向,使其携带货架移动到相应位置。但是现在的分拣机器人移动的过程中,容易对定位条码造成损坏,模糊条码容易使得整个物流系统的秩序破坏。并且由于定位条码更换起来较为麻烦,使得分拣机器人的移动路线不易调整,整个物流分拣过程不够灵活。鉴于此,我们提出一种带有智能识别系统的货物分拣用机器人。
技术实现要素:
5.本发明的目的在于提供一种带有智能识别系统的货物分拣用机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种带有智能识别系统的货物分拣用机器人,包括机器人主体和地砖,所述机器人主体中固定按照有控制盒,且机器人主体上固定安装有保护罩,且保护罩中固定安装有识别镜头,所述机器人主体上转动安装有脚轮,且机器人主体上固定安装有升降杆,且升降杆上固定连接有托盘,所述机器人主体中固定安装有保护盒,且保护盒中安装有具有可伸缩定位功能的磁驱动结构,所述机器人主体上安装有具有复位功能的解锁结构,所述地砖上固定安装有功能盒,且功能盒中安装有具有隐藏功能的条码显示结构,所述条码显示结构由具有四向独立控制功能的推动结构以及具有开关门功能的屏幕结构构成。
7.优选的,所述磁驱动结构包括有固定安装在保护盒中的第一弹簧,且第一弹簧上固定连接有第一滑套,所述第一滑套上固定连接有第一磁块,且第一滑套上设置有定位口,所述磁驱动结构还包括有滑动安装在保护盒中的定位销,且定位销上固定安装有楔块,所述磁驱动结构还包括有固定安装在保护盒中的复位电机以及限速夹杆,且复位电机上连接有推动轮。
8.优选的,所述第一弹簧固定安装在保护盒的顶部,且第一磁块固定安装在第一护
套的底部,所述定位口设置在第一滑套的侧壁上,且定位销采用弹簧销,贯穿安装在保护盒的侧壁上,所述楔块固定安装在定位销的顶面,所述推动轮以及限速夹杆均与第一滑套接触连接。
9.优选的,所述解锁结构包括有固定安装在机器人主体中的第二弹簧,且第二弹簧上固定安装有第二滑套,所述第二滑套上固定安装有第二磁块和推杆。
10.优选的,所述第二弹簧固定安装在机器人主体的底部内壁上,且第二滑套贯穿连接在机器人主体的壳体上,所述第二磁块固定安装在第二滑套的底部,且推杆固定安装在第二滑套的侧面,且推杆与楔块接触连接。
11.优选的,所述功能盒固定安装在地砖的底部,且推动结构包括有滑动安装在功能盒中的压块,所述压块上固定安装有磁座,且功能盒中固定安装有支架,所述支架上转动安装有转动杆。
12.优选的,所述屏幕结构包括有有滑动安装在功能盒中的中心座,所述中心座上固定安装有条码显示器,且条码显示器上固定连接有拉绳,所述拉绳滑动连接在绳套中,且拉绳上固定连接有防护门,所述防护门上固定连接有第三弹簧,且地砖上设置有中心槽。
13.优选的,所述压块安装在地砖以及功能盒的通槽中,且压块以及转动杆围绕中心槽安装有四组,所述转动杆通过转轴安装在支架上,构成杠杆结构,所述中心座和压块分别接触连接在转动杆的两端,且条码显示器固定安装在中心座的顶面,所述拉绳、绳套以及防护门对称设置有两组,且拉绳连接在中心座以及防护门的侧面,所述防护门滑动安装在地砖的滑槽中,且绳套固定安装在功能盒中,所述第三弹簧连接在防护门与地砖的滑槽槽壁之间,且功能盒的中部设置有与中心槽连通的通槽。
14.优选的,所述保护罩固定安装在机器人主体的地面,且识别镜头下沉式安装,所述脚轮安装有四个,且脚轮上安装有转向组件,且转向组件通过控制盒控制,所述升降杆安装在机器人主体的顶部,且托盘安装在升降杆的端部,所述地砖上设置有安装锁扣。
15.与现有技术相比,本发明的有益效果是:
16.1.本发明的智能分拣机器人由机器人主体以及地砖两部分构成,具有智能识别确认方向的功能,其中地砖为铺设结构,能够用在物流仓中进行地面铺设,与机器人主体进行配套使用,机器人主体能通过脚轮进行四向移动,带动托盘上的货架移动,并且机器人主体底部设置有识别镜头,能够对地砖上设置的条码显示结构中的条码进行扫描识别,完成移动方向的确认,从而使得机器人主体能够将货架带动到相应的地方,完成分拣工作;
17.2.本发明中的条码显示结构包括有推动结构以及屏幕结构,依托于功能盒安装在地砖上,正常情况下能够进行条码的隐藏,而只有机器人主体移动到地砖上时,才会通过磁驱动结构产生的作用,使得条码显示出来,条码能够得到良好的保护,不易被灰尘以及摩擦遮挡损伤,保证物流分拣系统的正常运行,并且屏幕结构由于采用数字屏幕进行条码显示,相较于传统的纸质条码,能够更加灵活的进行条码更换,能够系统同一调整,使用十分方便;
18.3.本发明的推动结构具有四向独立控制功能,机器人主体不管从前后左右哪个方向进入地砖,都能够触发屏幕结构,并且利用磁座对解锁结构的驱动,能够使得磁驱动结构暂时回缩,避免了推动结构被反复驱动,使得同一块地砖上的条码只被识别一次;
19.4.本发明通过磁驱动结构作为安装在机器人主体上的触发装置,其能够随着机器
人主体进行移动,使得机器人主体移动到相应的地砖上时,产生驱动力使得地砖底部的条码显示结构弹出,从而使得机器人主体能够完成扫描识别,为机器人主体的下一步移动指引方向,并且磁驱动结构具有伸缩性,能够在完成一次驱动之后,配合解锁结构的作用,进行回缩,从而防止产生连续的两次驱动,使得条码显示结构不会重复弹出,得到良好的防刮保护。
附图说明
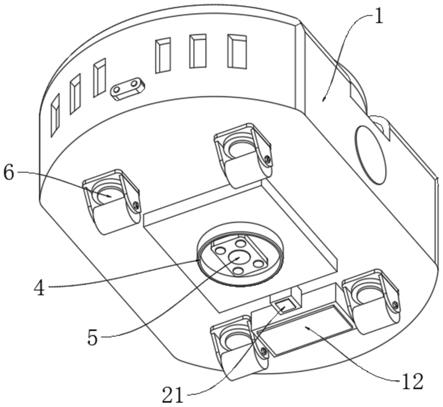
20.图1为本发明整体结构的示意图;
21.图2为本发明结构的底部示意图;
22.图3为本发明结构识别状态的示意图;
23.图4为本发明机器人底部示意图;
24.图5为本发明机器人内部结构的示意图;
25.图6为本发明驱动结构的示意图;
26.图7为本发明驱动结构的拆分图;
27.图8为本发明地砖结构的示意图;
28.图9为本发明地砖功能盒结构的示意图;
29.图10为本发明升降式识别结构的示意图。
30.图中:机器人主体1、地砖2、控制盒3、保护罩4、识别镜头5、脚轮6、升降杆7、托盘8、保护盒9、第一弹簧10、第一滑套11、第一磁块12、定位口13、定位销14、楔块15、复位电机16、推动轮17、限速夹杆18、第二弹簧19、第二滑套20、第二磁块21、推杆22、功能盒23、压块24、磁座25、支架26、转动杆27、中心座28、条码显示器29、拉绳30、绳套31、防护门32、第三弹簧33、中心槽34。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.请参阅图1至图10,本发明提供一种技术方案:一种带有智能识别系统的货物分拣用机器人,包括机器人主体1和地砖2,机器人主体1中固定按照有控制盒3,且机器人主体1上固定安装有保护罩4,且保护罩4中固定安装有识别镜头5,机器人主体1上转动安装有脚轮6,且机器人主体1上固定安装有升降杆7,且升降杆7上固定连接有托盘8,机器人主体1中固定安装有保护盒9,且保护盒9中安装有具有可伸缩定位功能的磁驱动结构,机器人主体1上安装有具有复位功能的解锁结构,地砖2上固定安装有功能盒23,且功能盒23中安装有具有隐藏功能的条码显示结构,条码显示结构由具有四向独立控制功能的推动结构以及具有开关门功能的屏幕结构构成。
33.磁驱动结构包括有固定安装在保护盒9中的第一弹簧10,且第一弹簧10上固定连接有第一滑套11,第一滑套11上固定连接有第一磁块12,且第一滑套11上设置有定位口13,磁驱动结构还包括有滑动安装在保护盒9中的定位销14,且定位销14上固定安装有楔块15,
磁驱动结构还包括有固定安装在保护盒9中的复位电机16以及限速夹杆18,且复位电机16上连接有推动轮17;
34.通过磁驱动结构作为安装在机器人主体1上的触发装置,其能够随着机器人主体1进行移动,使得机器人主体1移动到相应的地砖2上时,产生驱动力使得地砖2底部的条码显示结构弹出,从而使得机器人主体1能够完成扫描识别,为机器人主体1的下一步移动指引方向,并且磁驱动结构具有伸缩性,能够在完成一次驱动之后,配合解锁结构的作用,进行回缩,从而防止产生连续的两次驱动,使得条码显示结构不会重复弹出,得到良好的防刮保护;
35.第一弹簧10固定安装在保护盒9的顶部,且第一磁块12固定安装在第一护套11的底部,定位口13设置在第一滑套11的侧壁上,且定位销14采用弹簧销,贯穿安装在保护盒9的侧壁上,楔块15固定安装在定位销14的顶面,推动轮17以及限速夹杆18均与第一滑套11接触连接;
36.保护盒9随着机器人主体1进行移动,其上的定位销14插接在第一滑套11的定位口13中,能够进行第一滑套11的定位固定,使得第一滑套11上的第一磁块12保持在机器人主体1的底部,能够在移动到用于识别的地砖2上时,产生磁力进行条码显示结构的驱动;
37.解锁结构包括有固定安装在机器人主体1中的第二弹簧19,且第二弹簧19上固定安装有第二滑套20,第二滑套20上固定安装有第二磁块21和推杆22;
38.解锁结构主要用于磁驱动结构的解锁,其在机器人的识别过程中工作,在磁驱动结构进行工作时,由于第二护套20上的第二磁块21与第一磁块12的磁极反向安装,第二磁块21反而受到条码显示结构的吸引进行下移,带动了推杆22移动,产生压力作用在定位销14的楔块15上,使得定位销14从定位口13中脱出,第一滑套11会在第一弹簧10的作用下上移,而为了留足第一磁块12产生磁力进行驱动的时间,通过限速夹杆18的摩擦力进行了第一滑套11的移动限制,最终第一滑套11带动第一磁块12缩进机器人主体1中,不会再对同一块地砖2上的条码显示结构进行驱动,在机器人主体1移动走之后,再通过推动轮19产生摩擦力,使得第一滑套11下移复位,并利用定位销14进行固定,解锁结构同样在第二弹簧19的作用下复位;
39.第二弹簧19固定安装在机器人主体1的底部内壁上,且第二滑套20贯穿连接在机器人主体1的壳体上,第二磁块21固定安装在第二滑套20的底部,且推杆22固定安装在第二滑套20的侧面,且推杆22与楔块15接触连接;
40.条码显示结构包括有推动结构以及屏幕结构,依托于功能盒23安装在地砖2上,正常情况下能够进行条码的隐藏,而只有机器人主体1移动到地砖2上时,才会通过磁驱动结构产生的作用,使得条码显示出来,条码能够得到良好的保护,不易被灰尘以及摩擦遮挡损伤,保证物流分拣系统的正常运行;
41.功能盒23固定安装在地砖2的底部,且推动结构包括有滑动安装在功能盒23中的压块24,压块24上固定安装有磁座25,且功能盒23中固定安装有支架26,支架26上转动安装有转动杆27;
42.屏幕结构包括有有滑动安装在功能盒23中的中心座28,中心座28上固定安装有条码显示器29,且条码显示器29上固定连接有拉绳30,拉绳30滑动连接在绳套31中,且拉绳30上固定连接有防护门32,防护门32上固定连接有第三弹簧33,且地砖2上设置有中心槽34;
43.在条码显示结构中,推动结构主要用于被磁驱动结构驱动,同时带动解锁结构运动,而屏幕结构则具有升降能力,在回缩时关闭防护门32,伸出时自动打开防护门32,并且屏幕结构由于采用数字屏幕进行条码显示,相较于传统的纸质条码,能够更加灵活的进行条码更换,能够系统同一调整,使用十分方便;
44.压块24安装在地砖2以及功能盒3的通槽中,且压块24以及转动杆27围绕中心槽34安装有四组,转动杆27通过转轴安装在支架26上,构成杠杆结构,中心座28和压块24分别接触连接在转动杆27的两端,且条码显示器29固定安装在中心座28的顶面,拉绳30、绳套31以及防护门32对称设置有两组,且拉绳30连接在中心座28以及防护门32的侧面,防护门32滑动安装在地砖2的滑槽中,且绳套31固定安装在功能盒23中,第三弹簧33连接在防护门32与地砖2的滑槽槽壁之间,且功能盒23的中部设置有与中心槽34连通的通槽;
45.当磁驱动结构跟随机器人主体1移动到地砖2上时,第一磁块12的磁斥力作用在磁座25上,使得压块24带动转动杆27转动,转动杆27的另一端作用在中心座28的底部,使得中心座28带动条码显示器29上升,从中心槽34中进行条码显示,并且在中心座28移动的过程中,能够对拉绳30进行拉动,拉绳30经过绳套31的转向作用,产生拉力作用在防护门32上,达到随着条码显示器29升起,防护门32自动打开的作用,反之则在第三弹簧33的作用下,防护门32自动关闭,进行条码显示器29的防尘防撞;
46.并且推动结构具有四向独立控制功能,机器人主体1不管从前后左右哪个方向进入地砖2,都能够触发屏幕结构,并且利用磁座25对解锁结构的驱动,能够使得磁驱动结构暂时回缩,避免了其它方向的推动结构被反复驱动;
47.保护罩4固定安装在机器人主体1的地面,且识别镜头5下沉式安装,脚轮6安装有四个,且脚轮6上安装有转向组件,且转向组件通过控制盒3控制,升降杆7安装在机器人主体1的顶部,且托盘8安装在升降杆7的端部,地砖2上设置有安装锁扣;
48.本发明的机器人由机器人主体1以及地砖2两部分构成,地砖2为铺设结构,能够用在物流仓中进行地面铺设,与机器人主体1进行配套使用,机器人主体1能通过脚轮6进行四向移动,带动托盘8上的货架移动,并且机器人主体1底部设置有识别镜头5,能够对地砖2上设置的条码显示结构中的条码进行扫描识别,完成移动方向的确认,从而使得机器人主体1能够将货架带动到相应的地方,完成分拣工作;
49.工作原理:首先,本发明的机器人由机器人主体1以及地砖2两部分构成,地砖2为铺设结构,能够用在物流仓中进行地面铺设,与机器人主体1进行配套使用,机器人主体1能通过脚轮6进行四向移动,带动托盘8上的货架移动,并且机器人主体1底部设置有识别镜头5,能够对地砖2上设置的条码显示结构中的条码进行扫描识别,完成移动方向的确认,从而使得机器人主体1能够将货架带动到相应的地方,完成分拣工作,具体的,通过磁驱动结构作为安装在机器人主体1上的触发装置,其能够随着机器人主体1进行移动,使得机器人主体1移动到相应的地砖2上时,产生驱动力使得地砖2底部的条码显示结构弹出,从而使得机器人主体1能够完成扫描识别,为机器人主体1的下一步移动指引方向,并且磁驱动结构具有伸缩性,能够在完成一次驱动之后,配合解锁结构的作用,进行回缩,从而防止产生连续的两次驱动,使得条码显示结构不会重复弹出,得到良好的防刮保护,保护盒9随着机器人主体1进行移动,其上的定位销14插接在第一滑套11的定位口13中,能够进行第一滑套11的定位固定,使得第一滑套11上的第一磁块12保持在机器人主体1的底部,能够在移动到用于
识别的地砖2上时,产生磁力进行条码显示结构的驱动,解锁结构主要用于磁驱动结构的解锁,其在机器人的识别过程中工作,在磁驱动结构进行工作时,由于第二护套20上的第二磁块21与第一磁块12的磁极反向安装,第二磁块21反而受到条码显示结构的吸引进行下移,带动了推杆22移动,产生压力作用在定位销14的楔块15上,使得定位销14从定位口13中脱出,第一滑套11会在第一弹簧10的作用下上移,而为了留足第一磁块12产生磁力进行驱动的时间,通过限速夹杆18的摩擦力进行了第一滑套11的移动限制,最终第一滑套11带动第一磁块12缩进机器人主体1中,不会再对同一块地砖2上的条码显示结构进行驱动,在机器人主体1移动走之后,再通过推动轮19产生摩擦力,使得第一滑套11下移复位,并利用定位销14进行固定,解锁结构同样在第二弹簧19的作用下复位,条码显示结构包括有推动结构以及屏幕结构,依托于功能盒23安装在地砖2上,正常情况下能够进行条码的隐藏,而只有机器人主体1移动到地砖2上时,才会通过磁驱动结构产生的作用,使得条码显示出来,条码能够得到良好的保护,不易被灰尘以及摩擦遮挡损伤,保证物流分拣系统的正常运行,在条码显示结构中,推动结构主要用于被磁驱动结构驱动,同时带动解锁结构运动,而屏幕结构则具有升降能力,在回缩时关闭防护门32,伸出时自动打开防护门32,并且屏幕结构由于采用数字屏幕进行条码显示,相较于传统的纸质条码,能够更加灵活的进行条码更换,能够系统同一调整,使用十分方便,当磁驱动结构跟随机器人主体1移动到地砖2上时,第一磁块12的磁斥力作用在磁座25上,使得压块24带动转动杆27转动,转动杆27的另一端作用在中心座28的底部,使得中心座28带动条码显示器29上升,从中心槽34中进行条码显示,并且在中心座28移动的过程中,能够对拉绳30进行拉动,拉绳30经过绳套31的转向作用,产生拉力作用在防护门32上,达到随着条码显示器29升起,防护门32自动打开的作用,反之则在第三弹簧33的作用下,防护门32自动关闭,进行条码显示器29的防尘防撞,并且推动结构具有四向独立控制功能,机器人主体1不管从前后左右哪个方向进入地砖2,都能够触发屏幕结构,并且利用磁座25对解锁结构的驱动,能够使得磁驱动结构暂时回缩,避免了其它方向的推动结构被反复驱动。
50.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1