一种新型垃圾分类消毒机器人
1.本实用新型涉及垃圾处理分类消毒技术,尤其是涉及一种新型垃圾分类消毒机器人。
背景技术:
2.随着世界人口的增多(75亿人),垃圾处理问题日益突出。人口的增长加快了资源的消耗速度,而垃圾中含有众多人类可回收利用的资源,回收重利用,是每个国家特别是发展中国家急于解决的问题。而且,受垃圾中的细菌和病毒的影响,导致人工垃圾分类对人体的伤害巨大,垃圾消毒应运而生。我国加速推行垃圾分类制度,2017年初,发改委及住建部联合下发《生活垃圾分类制度实施方案》,要求在46个试点城市先行先试生活垃圾强制分类。2021年5月,国家发改委和住建部联合发布《“十四五”城镇生活垃圾分类和处理设施发展规划》,要求到2025年底,直辖市、省会城市和计划单列市等46个重点城市生活垃圾分类和处理能力进一步提升;目前传统垃圾分类主要是依靠人们自觉进行垃圾分类,但大多数人们心中没有这种潜意识,垃圾分类工作的推进还有很长一段路要走。
3.现有技术中,主要的垃圾分类机器人具备垃圾识别、垃圾分拣的功能,但是,市场上的垃圾分类机器人没有以下功能:1、无法实现空气质量检测,搜集垃圾分类区域空气微生物样本,对空气进行消毒清新的功能;2、无法制定消毒计划,不能够实现消毒剂的经济使用和器械的清洁;3、单机运行,没有通讯终端进行通讯控制,因此我们对此做出改进,提出一种新型垃圾分类消毒机器人。
技术实现要素:
4.本实用新型目的是为了克服上述技术存在的缺陷而提供一种新型垃圾分类消毒机器人。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种新型垃圾分类消毒机器人,包括工作台和识别组件,所述工作台上设有传送带,所述工作台以所述传送带为中心呈线性排布;所述识别组件包括用于垃圾分类的机械分拣手臂、转轴、支撑轴、dsp处理器、图像数据处理器、中央处理器、3d相机、红外线传感器、上垂直旋转电机、下垂直旋转电机和水平旋转电机,所述识别组件还包括用于清洁消毒的紫外线灯、喷头和空气采样微处理器,所述机械分拣手臂包括可开合的机械爪,所述机械分拣手臂的一端与所述上垂直旋转电机的输出端连接,所述上垂直旋转电机通过所述转轴与所述下垂直旋转电机连接,所述下垂直旋转电机通过所述支撑轴与所述水平旋转电机连接,所述上垂直旋转电机、所述下垂直电机、所述水平旋转电机都与所述dsp控制器连接,所述支撑轴上设有所述红外线传感器,所述3d相机的镜头始终朝向所述传送带,所述中央控制器和3d相机都通过无线网络与远程终端通讯连接;所述远程终端中设有识别不同种类垃圾的程序。
7.优选的,所述工作台为矩形平台,所述传送带位于所述矩形平台上。
8.优选的,所述识别组件还包括设于所述支撑轴下方的底座和设于所述3d相机、喷头、紫外线灯上方的细杆,所述细杆上方设有支撑铁柱,所述细杆和所述支撑铁柱之间设有固定的螺母。
9.优选的,所述底座与地面之间设有多颗固定螺母。
10.优选的,所述中央控制器和3d相机通过wifi模块和蓝牙模块与远程终端连接。
11.优选的,还包括连接所述喷头的通道控制器。
12.优选的,还包括设于所述通道控制器下方的消毒液容器、清水容器、清洁泡沫容器、空气清新剂容器。
13.优选的,还包括设于所述容器中的流量检测器。
14.优选的,还包括与所述容器连接的报警器。
15.与现有技术相比,本实用新型具有以下优点:
16.1、结构排布简单,功能完善,利用wifi,蓝牙的通讯方式,使本实用新型能够智能判断垃圾类型并进行分类,适应未来垃圾分类机器人发展方向。
17.2、通过传送带传送垃圾,机械分拣手抓取垃圾放入垃圾桶中,比起传统人工垃圾分类的方式,节省了人力,机械分拣手抓取分类的方式效率更高,出错率低。
18.3、本实用新型的垃圾分类机器人与现有的垃圾分类机器人的外观改动不大,主要增加了识别组件,处理垃圾种类更多,人工智能化更高。
19.4、本实用新型的垃圾分类算法在服务器终端运行,分类现场只完成分类动作的执行和采集垃圾的图像信息,服务器终端的垃圾分类算法通过3d相机采集到的图像样本不断更新积累,通过深度学习样本训练进一步提升垃圾分类的识别率。
附图说明
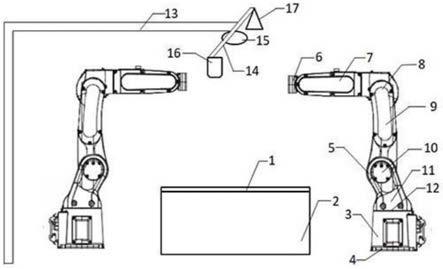
20.图1为本实用新型的结构示意图;
21.图2为本实用新型的俯视布局图;
22.图3为本实用新型的硬件系统框架图;
23.图4为本实用新型的空气采样技术框图。
24.图中标注:1、传送带,2、工作台,3、底座,4、固定螺母,5、红外线传感器,6、机械爪,7、机械分拣手臂,8、上垂直旋转电机,9、转轴,10、下垂直旋转电机,11、支撑轴,12、水平旋转电机,13、铁杆,14、细杆,15、3d相机,16、喷头,17、紫外线灯。
具体实施方式
25.下面结合附图和具体实例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,列出了具体的实施方式和详细的操作过程,本实用新型的保护范围不限于下述的实施例。
26.实施例
27.如图1
‑
4所示,一种新型垃圾分类消毒机器人,包括工作台2和识别组件。工作台2上设有传送垃圾的传送带1,工作台2以传送带1为中心呈线性排布,本实施例中,工作台2形状为矩形长方体,其上由1根铁杆13固定1根细杆14,细杆14上依次固定有喷头16,3d相机15,紫外线灯17。
28.识别组件包括用于垃圾分类的垃圾分类的机械分拣手臂7、转轴9、dsp处理器、中央处理器、3d相机15、红外线传感器5、上垂直旋转电机8、下垂直旋转电机10、支撑轴11和水平旋转电机12。识别组件还包括用于清洁消毒的紫外线灯17、喷头16、通道控制器、空气采样微处理器和报警器。底座3设于工作台2的两侧,底座3与地面之间由多颗固定螺母4螺纹固定,底座3上部设有水平旋转电机12控制机械分拣手臂7左右运动。支撑轴11的上端与下垂直旋转电机10连接,下垂直旋转电机10通过转轴9与上垂直电机8连接控制机械分拣手臂7上下运动。水平旋转电机12、上垂直旋转电机8和下垂直旋转电机10相互配合,使机械分拣手臂7可以在整个分拣环境中地灵活运动,结构简单但坚实耐用。机械分拣手臂7一端与上垂直旋转电机8输出轴连接,且输出轴位于支撑轴11的延长线上。机械分拣手臂7另一端包括可开合的机械爪6。传送带1上方装有3d相机15,3d相机15的镜头朝向传送带,负责采集图像数据。设于细杆14上的紫外线灯17和喷头16负责消毒清洁。上垂直旋转电机8、下垂直旋转电机10、水平旋转电机12都与dsp处理器连接。中央处理器和3d相机15都与远程终端通讯连接。本实施例中,中央控制器和3d相机15通过wifi模块和蓝牙模块与远程终端连接。
29.本实施例中,远程终端为手机app或者微信小程序,手机app或者小程序中设有识别不同种类垃圾的程序,该程序通过采用深度学习算法实现对不同垃圾图像的识别,可选的深度学习算法很多,比如(centernet、faster r
‑
cnn、yolov3、ssd等)其中yolov3的综合性能最佳,训练过程包括:先收集大量垃圾的图片数据,在本实施例中总共分为了20种垃圾;用图像数据处理器将图片数据处理成300*300的大小,再通过改程序标识出每个图像上感兴趣的区域,得到坐标;使用上述坐标、图片信息以及每个素材图片代表的垃圾类型(数字表示)制作训练集,进行训练。实时读取垃圾机器人3d相机15拍摄的图片,并将3d相机15得到的图片规格改为300*300的大小,通过训练好的程序实现垃圾种类识别。
30.本实施例中,控制器为dsp处理器,通过dsp处理器进行装置总体的机械控制。上垂直旋转电机8以及转动转轴9的下垂直旋转电机10和水平旋转电机12由电网供电,再由调压调流模块给电,通过dsp处理器控制旋转角度的程序来完成控制。其中,上垂直旋转电机8旋转角度为180
°
,下垂直旋转电机10旋转角度为120
°
,水平旋转电机12旋转角度为300
°
,可以满足垃圾分类的范围要求。
31.通信控制方面,使用wifi模块连接3d相机15,在手机app或微信小程序端用c#编写的软件中的线程实时连续地读取3d相机15的图像资料。在全自动的情况下,3d相机15连续地拍摄照片,在一定时间间隔内提取一帧画面,因此可以确认是否有垃圾放上传送带1,如果没有,则机械分拣手臂7不做动作,如果有则进行后续操作。在调试机器时,手机app或微信小程序界面上设置了一个选项,通过给该选项编程实现拍照功能,将拍到的画面提取出来,后用手指触屏点击该选项进行“拍照
‑
识别
‑
动作”的操作。再调用已经写好的yolov3函数程序将图片尺寸规范化,识别后得出分类结果。不同的分类结果与不同的程序指令相对应,通过无线通讯方式传递给wifi模块,最后通过串口通信将固定格式的指令传给dsp处理器,dsp处理器内部程序执行和指令对应的操作,从而控制旋转电机工作,将垃圾投放到正确的垃圾桶内。
32.本实用新型的工作原理为:将垃圾放上传送带1,设于细杆14下方的3d相机15不断采集图像数据并通过wifi发送到手机app或微信小程序上,通过之前训练过的大量素材与采集到的图像数据进行对比后给出识别的结果,手机app或微信小程序把命令通过wifi送
入dsp处理器,控制转轴9上的上垂直旋转电机8、下垂直旋转电机10和底座3上的水平旋转电机旋转一定的角度抓取传送带1上的垃圾并放入垃圾桶内,一个完整的整个分类过程结束。
33.优选的,远程终端还设置有垃圾识别升级算法,在本机器运行的过程中,连续地将工作中抓拍到的多种多样的新图片上传,后由工作人员划分种类后加入深度学习的训练集中,相当于不断扩充图像素材库,从而达到越来越准确的识别结果。而且伴随着深度学习网络的发展,以后有使用更先进的网络结构的可能,并更进一步提升识别准确率。
34.本实用新型还可以在垃圾分类过程中进行垃圾消毒处理,在细杆14下方设置有紫外线灯17和喷头16,喷头16与通道控制器连接,在远程中端中设置通道控制程序和紫外线灯控制程序,在垃圾分类过程中,机器人通过红外传感器5和3d相机15对垃圾和周围环境进行识别分析。并将识别信息输入到中央控制器中,当检测到分类垃圾为普通垃圾,如瓶子、废纸、塑料制品等且红外传感器5检测到周围无人时仅采用紫外线灯17进行杀菌;当检测到周围有人时则通道控制器打开消毒液通道仅通过喷头喷洒消毒液消毒;当检测到分类垃圾为特殊垃圾,如工业废品、医用废品等且周围无人时采用紫外线灯17和消毒液杀菌消毒;当检测到周围有人时则只采用消毒液消毒。同时,当达到预定喷雾量时就会停止喷洒,停止喷洒后停留5分钟以分解消毒液残留,然后结束消毒工作。
35.本实用新型还可以采用云端控制:由于本实用新型能接入互联网,从而借由互联网组网技术,实现云端控制。垃圾分类的图片数据可以上传至云端,作为新的训练素材完善深度学习网络模型;图像的识别也可以由云端服务器执行,并将结果发回装置;同时也可以实时地监控装置的运行状态。
36.本实用新型还设置有报警器,当与通道控制器连接的清水容器、清洁泡沫容器、空气新型剂容器和消毒液容器中的溶液耗尽时,容器内的流量检测器会产生电信号到报警器和中央控制器中,报警器发出报警声的同时停止作业。
37.本实用新型在消毒结束后进行空气质量检测和空气样本采集。在完成消毒后,空气采样微处理器通过高负压泵的作用下将空气抽进采样器中,通过高负压泵控制模块实时pid控制系统监测采样流量,自动控制采样流量按照设定值恒流采样,累计采样体积并通过采集到的流量计前的温度和压力自动换算成标准状态下的采样体积。在微处理器中固化2种采样模式,分别设定了冲击式采样和水过滤采样,使用时只需要在手机app或微信小程序中在空气采样模块点击“启动”键即可自动工作,无需人为调节流量和控制采样时间。配置数字/文字显示,显示设定采样体积和实时实际被吸入的气体体积,存储记录每次采样流量参数和采样时间,方便后期采样结果查询。
38.本实用新型还可以进行设备清洗及空气清新。垃圾分类消毒工作结束后,工作人员可根据当日设备情况合理选择是否清洁。手机app或者微信小程序中选中清洁选项后,中央控制器控制通道选择器先打开清洁泡沫容器的通道由喷头16向设备喷洒清洁泡沫,待清洁泡沫软化污垢后再通过通道选择控制器打开清水容器通道并关闭清洁泡沫容器通道,喷头16向设备喷射清水冲刷设备。整个清洁过程结束后,中央控制器控制通道选择器打开空气清新剂通道并关闭清水容器通道,喷头16喷洒空气清新剂对整个工作环境进行空气清新处理。静置一晚自然风干,减轻了工作人员的工作量,保证了机器设备的干净整洁。
39.本实用新型中提出的垃圾分类机器人,适用于小区、学校(中小学、大学、职校)、商
业区、工厂宿舍、医院、车站等一些集中的垃圾分类点。针对的垃圾类型为干垃圾,包括塑料、木头、石块、纸板、织物等20种可回收垃圾。本装置的垃圾分类机械手与现有垃圾分类机械手的外形改变不大,主要增加了识别组件,实现了更全面,智能化的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1