一种基于机器视觉的垃圾分拣机器人
1.本发明涉及垃圾分拣技术领域,具体为一种基于机器视觉的垃圾分拣机器人。
背景技术:
2.机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分cmos和ccd两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作,而垃圾分拣是为了从一堆垃圾里,将干湿垃圾、可回收物一一分拣出来,分别投放到塑料瓶、易拉罐、玻璃筐里,从而达到垃圾分类处理的目的。
3.经过海量检索,发现现有技术中的垃圾分拣装置典型的如公开号为cn113083702a公开的一种基于机器视觉的垃圾分拣机器,包括移动车、旋转伸缩机械手、夹爪、摄像头以及计算机,所述旋转伸缩机械手安装在移动车上,所述夹爪安装所述旋转伸缩机械手上,所述摄像头安装在移动车上,所述计算机设置在移动车内,所述旋转伸缩机械手、夹爪以及摄像头均与所述计算机电连接;所述摄像头用于地面画面信息,所述计算机用于分析摄像头获取的画面中是否有塑料瓶、塑料袋、纸片以及纸包装袋;所述夹爪以及旋转伸缩机械手由所述计算机驱动控制。
4.现有的垃圾分拣机械人在使用过程中,不便于对摄像头进行拆卸,从而导致了摄像头的拆卸维护效率较低,导致设备的停机时间较长,影响设备的使用流畅性,且现有的垃圾分拣设备分拣效率较低。
技术实现要素:
5.本发明的目的在于提供一种基于机器视觉的垃圾分拣机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的垃圾分拣机器人,包括框架、第二支撑架、活动块、滑块、第一支撑架、第一螺杆、第二螺杆和嵌合槽,所述框架内部设置有传动带,所述框架上端外壁一侧安装有第一支撑架,所述框架背离第一支撑架一侧外壁安装有第二支撑架,所述第二支撑架两侧内壁均开设有卸料口,所述第二支撑架内壁上端一侧插接安装有连接罩。
7.优选的,所述第一支撑架一侧外壁开设有通孔,所述第一支撑架内壁上端一侧开设有活动槽;
8.所述活动槽内部活动安装有活动块,所述活动块一侧外壁嵌入安装有第二轴承,所述活动块贯穿活动槽一端外壁安装有连接架,所述第二轴承保证了活动块在活动槽内部的移动稳定性;
9.所述连接架一侧外壁开设有嵌合槽,所述嵌合槽内壁一侧安装有磁石本体,所述
磁石本体吸附有嵌合块,所述嵌合块贯穿嵌合槽一端外壁安装有摄像机本体,所述磁石本体的吸附力,达到了固定嵌合块和摄像机本体的目的;
10.所述活动槽内壁一侧开设有第一螺孔,所述第一螺孔内部螺纹连接有第一螺杆,且第一螺杆贯穿第一螺孔一端外壁位于第二轴承内部,所述第一螺杆在第一螺孔内部转动时,通过第二轴承带动活动块发生相对移动,达到了调节摄像机本体使用位置的目的。
11.优选的,所述连接罩内壁两侧均嵌入安装有第一轴承,所述第一轴承内部转动安装有第二螺杆,所述第一轴承保证了第二螺杆的转动位置稳定性和流畅性;
12.所述第二螺杆贯穿第一轴承一端外壁安装有电机,所述电机与连接罩外壁相连接,所述电机带动第二螺杆在第一轴承内部转动。
13.优选的,所述连接罩内部设置有滑块,所述滑块内部开设有第二螺孔,所述第二螺杆螺纹连接于第二螺孔内部,所述第二螺杆在连接罩内部转动时,所述滑块通过第二螺孔发生相对移动;
14.所述滑块贯穿连接罩一端外壁安装有固定架,所述固定架背离滑块两侧外壁均安装有气缸本体,所述气缸本体一端外壁安装有气动夹爪,所述气缸本体带动气动夹爪移动,达到了调节气动夹爪具体使用位置的目的,且气动夹爪达到了夹持垃圾的目的。
15.与现有技术相比,本发明的有益效果是:本发明通过设置第一支撑架、第二支撑架和连接罩,达到了提高垃圾分拣效率的效果,传动带带动垃圾发生移动,垃圾移动至第一支撑架下端时,摄像机本体对垃圾图像进行采集,并传递至外置的控制器,从而得知目标垃圾的位置和体积,当垃圾移动至第二支撑架下端时,电机带动第二螺杆转动,滑块通过第二螺孔发生相对移动,使一端气缸本体和气动夹爪移动至目标垃圾上端,气缸本体带动气动夹爪发生垂直移动,气动夹爪对垃圾进行夹持,气缸本体带动气动夹爪复位,且电机带动夹持有垃圾的气动夹爪移动至卸料口上端,气动夹爪能够通过卸料口对垃圾进行卸料,通过两个气动夹爪相互配合,保证了卸料的同时进行抓料,提高了对垃圾的分拣效率,且工作人员手动转动第一螺杆,第一螺杆通过第一螺孔带动活动块发生相对移动,直至摄像机本体通过通孔移出第一支撑架内部,工作人员通过磁石本体和嵌合槽能够快速对摄像机本体进行拆卸,提高了摄像机本体的拆卸效率,避免设备的停机时间较长,保证了设备的使用流畅性。
附图说明
16.图1为本发明的框架结构俯视示意图;
17.图2为本发明的第一支撑架结构侧剖示意图;
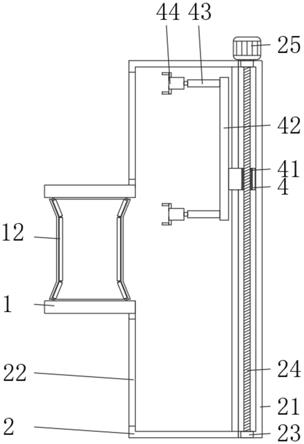
18.图3为本发明的第二支撑架结构侧剖示意图;
19.图4为本发明的图2中活动槽结构局部放大示意图。
20.图中:1、框架;11、第一支撑架;12、传动带;13、通孔;14、活动槽;15、第一螺孔;16、第一螺杆;2、第二支撑架;21、连接罩;22、卸料口;23、第一轴承;24、第二螺杆;25、电机;3、活动块;31、第二轴承;32、连接架;33、嵌合槽;34、磁石本体;35、嵌合块;36、摄像机本体;4、滑块;41、第二螺孔;42、固定架;43、气缸本体;44、气动夹爪。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.请参阅图1至图4,本发明提供的四种实施例:
25.实施例一:一种基于机器视觉的垃圾分拣机器人,包括框架1、第二支撑架2、活动块3、滑块4、第一支撑架11、第一螺杆16、第二螺杆24和嵌合槽33,框架1内部设置有传动带12,框架1上端外壁一侧安装有第一支撑架11,框架1背离第一支撑架11一侧外壁安装有第二支撑架2,第二支撑架2两侧内壁均开设有卸料口22,第二支撑架2内壁上端一侧插接安装有连接罩21。
26.第一支撑架11一侧外壁开设有通孔13,第一支撑架11内壁上端一侧开设有活动槽14;
27.活动槽14内部活动安装有活动块3,活动块3一侧外壁嵌入安装有第二轴承31,活动块3贯穿活动槽14一端外壁安装有连接架32,第二轴承31保证了活动块3在活动槽14内部的移动稳定性;
28.连接架32一侧外壁开设有嵌合槽33,嵌合槽33内壁一侧安装有磁石本体34,磁石本体34吸附有嵌合块35,嵌合块35贯穿嵌合槽33一端外壁安装有摄像机本体36,磁石本体34的吸附力,达到了固定嵌合块35和摄像机本体36的目的;
29.活动槽14内壁一侧开设有第一螺孔15,第一螺孔15内部螺纹连接有第一螺杆16,且第一螺杆16贯穿第一螺孔15一端外壁位于第二轴承31内部,第一螺杆16在第一螺孔15内部转动时,通过第二轴承31带动活动块3发生相对移动,达到了调节摄像机本体36使用位置的目的,传动带12带动垃圾发生移动,垃圾移动至第一支撑架11下端时,摄像机本体36对垃圾图像进行采集,并传递至外置的控制器,从而得知目标垃圾的位置和体积,当垃圾移动至第二支撑架2下端时,电机25带动第二螺杆24转动,滑块4通过第二螺孔41发生相对移动,使一端气缸本体43和气动夹爪44移动至目标垃圾上端,气缸本体43带动气动夹爪44发生垂直移动,气动夹爪44对垃圾进行夹持,气缸本体43带动气动夹爪44复位,且电机25带动夹持有垃圾的气动夹爪44移动至卸料口22上端,气动夹爪44能够通过卸料口22对垃圾进行卸料,通过两个气动夹爪44相互配合,保证了卸料的同时进行抓料,提高了对垃圾的分拣效率。
30.实施例二:一种基于机器视觉的垃圾分拣机器人,包括框架1、第二支撑架2、活动块3、滑块4、第一支撑架11、第一螺杆16、第二螺杆24和嵌合槽33,框架1内部设置有传动带12,框架1上端外壁一侧安装有第一支撑架11,框架1背离第一支撑架11一侧外壁安装有第二支撑架2,第二支撑架2两侧内壁均开设有卸料口22,第二支撑架2内壁上端一侧插接安装有连接罩21。
31.连接罩21内壁两侧均嵌入安装有第一轴承23,第一轴承23内部转动安装有第二螺杆24,第一轴承23保证了第二螺杆24的转动位置稳定性和流畅性;
32.第二螺杆24贯穿第一轴承23一端外壁安装有电机25,正如本领域技术人员所熟知的,本发明的垃圾分拣装置还需要提供气缸本体43、气动夹爪44和电机25以使得其正常工作,并且正如本领域技术人员所熟知的,所述气缸本体43、气动夹爪44和电机25的提供司空见惯,其均属于常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配,电机25与连接罩21外壁相连接。电机25带动第二螺杆24在第一轴承23内部转动。
33.连接罩21内部设置有滑块4,滑块4内部开设有第二螺孔41,第二螺杆24螺纹连接于第二螺孔41内部,第二螺杆24在连接罩21内部转动时,滑块4通过第二螺孔41发生相对移动;
34.滑块4贯穿连接罩21一端外壁安装有固定架42,固定架42背离滑块4两侧外壁均安装有气缸本体43,气缸本体43在气压传动中将压缩气体的压力能转换为机械能的气动执行元件,活塞是气缸中的受压力零件。为防止活塞左右两腔相互窜气,设有活塞密封圈。活塞上的耐磨环可提高气缸的导向性,减少活塞密封圈的磨耗,减少摩擦阻力。耐磨环长使用聚氨酯、聚四氟乙烯、夹布合成树脂等材料。活塞的宽度由密封圈尺寸和必要的滑动部分长度来决定。滑动部分太短,易引起早期磨损和卡死。活塞的材质常用铝合金和铸铁,小型缸的活塞有黄铜制成的。气缸有做往复直线运动的和做往复摆动两种类型,气缸本体43一端外壁安装有气动夹爪44,气动夹爪44是利用压缩空气作为动力,用来夹取或抓取工件的执行装置,其主要作用是替代人的抓取工作,可有效地提高生产效率及工作的安全性,平行夹爪的手指是通过两个活塞动作的。每一活塞由一个滚轮和一个双曲柄与气动手指相连,形成一个特殊的驱动单元。这样,气动手指总是轴向对心移动,每个手指是不能单独移动的。如是手指反向移动,则先前受压的活塞处于排气状态,而另一个活塞处于受压状态,气缸本体43带动气动夹爪44移动,达到了调节气动夹爪44具体使用位置的目的,且气动夹爪44达到了夹持垃圾的目的,工作人员手动转动第一螺杆16,第一螺杆16通过第一螺孔15带动活动块3发生相对移动,直至摄像机本体36通过通孔13移出第一支撑架11内部,工作人员通过磁石本体34和嵌合槽33能够快速对摄像机本体36进行拆卸,提高了摄像机本体36的拆卸效率,避免设备的停机时间较长,保证了设备的使用流畅性。
35.实施例三:一种基于机器视觉的垃圾分拣机器人,包括框架1、第二支撑架2、活动块3、滑块4、第一支撑架11、第一螺杆16、第二螺杆24和嵌合槽33,框架1内部设置有传动带12,框架1上端外壁一侧安装有第一支撑架11,框架1背离第一支撑架11一侧外壁安装有第二支撑架2,第一支撑架11和第二支撑架2均采用铝合金材质设计,铝合金具有较高的强度,比强度接近高合金钢,比刚度超过钢,有良好的铸造性能和塑性加工性能,良好的导电、导热性能,良好的耐蚀性和可焊性,第二支撑架2两侧内壁均开设有卸料口22,第二支撑架2内
壁上端一侧插接安装有连接罩21,连接罩21采用聚氯乙烯材质设计,具有防火耐热作用,且强度符合需要。
36.实施例四:一种基于机器视觉的垃圾分拣机器人,包括框架1、第二支撑架2、活动块3、滑块4、第一支撑架11、第一螺杆16、第二螺杆24和嵌合槽33,框架1内部设置有传动带12,框架1上端外壁一侧安装有第一支撑架11,框架1背离第一支撑架11一侧外壁安装有第二支撑架2,第一支撑架11和第二支撑架2的制作过程:铝型材的生产流程主要包括熔铸、挤压和上色三个过程,先进行熔铸,是铝锭经高温熔化后,直接浇铸成铝棒的方法,之后挤压是型材成形的手段。首先根据型材产品断面设计、制造出模具,然后利用挤压机将加热好的铸棒从模具中挤出成形,之后铝及其合金在相应的电解液和特定的工艺条件下,由于外加电流的作用下,在铝制品上形成一层氧化膜的过程。氧化膜具有保护性、装饰性以及一些其他的功能特性,第二支撑架2两侧内壁均开设有卸料口22,第二支撑架2内壁上端一侧插接安装有连接罩21,连接罩21的原料制备方法主要分为悬浮聚合法、乳液聚合法和本体聚合法,其中乳液聚合法是最早的工业生产聚氯乙烯的一种方法。在乳液聚合中,除水和氯乙烯单体外,还要加入烷基磺酸钠等表面活性剂作乳化剂,使单体分散于水相中而成乳液状,以水溶性过硫酸钾或过硫酸铵为引发剂,还可以采用“氧化-还原”引发体系,聚合历程和悬浮法不同。也有加入聚乙烯醇作乳化稳定剂,十二烷基硫醇作调节剂,碳酸氢钠作缓冲剂的。聚合方法有间歇法、半连续法和连续法三种。聚合产物为乳胶状,乳液粒径0.05~2μm,可以直接应用或经喷雾干燥成粉状树脂。乳液聚合法的聚合周期短,较易控制,得到的树脂分子量高,聚合度较均匀。
37.工作原理:传动带12带动垃圾发生移动,垃圾移动至第一支撑架11下端时,摄像机本体36对垃圾图像进行采集,并传递至外置的控制器,从而得知目标垃圾的位置和体积,当垃圾移动至第二支撑架2下端时,电机25带动第二螺杆24转动,滑块4通过第二螺孔41发生相对移动,使一端气缸本体43和气动夹爪44移动至目标垃圾上端,气缸本体43带动气动夹爪44发生垂直移动,气动夹爪44对垃圾进行夹持,气缸本体43带动气动夹爪44复位,且电机25带动夹持有垃圾的气动夹爪44移动至卸料口22上端,气动夹爪44能够通过卸料口22对垃圾进行卸料,通过两个气动夹爪44相互配合,保证了卸料的同时进行抓料,且工作人员手动转动第一螺杆16,第一螺杆16通过第一螺孔15带动活动块3发生相对移动,直至摄像机本体36通过通孔13移出第一支撑架11内部,工作人员通过磁石本体34和嵌合槽33能够快速对摄像机本体36进行拆卸。
38.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1