一种基于深度学习的煤矸石识别分拣系统及方法
1.本发明涉及煤矿开采和深度学习技术交叉领域,具体涉及一种基于深度学习的煤矸石识别分拣系统及方法。
背景技术:
2.煤矿开采的过程中,煤块中常常混杂有矸石,在原煤处理后期,需要进一步分拣小块煤和矸石混合物,达到燃烧标准。煤矸石分拣是一种煤炭燃前处理方法,是煤矿生产中不可或缺的环节,也是提高煤炭品质的有效方法之一。目前煤矸石的分拣主要有湿选法、干选法和人工分拣法。湿选法主要包括重介法、跳汰法,其特点是利用煤炭和矸石的密度不同,将原煤置入溶液中,进而实现煤与矸石的分层分离,该方法所采用的设备庞大、工艺复杂、分拣效率低下且对环境造成了污染;干选法利用煤炭与矸石对光的透射率不同而采用双能γ射线透射识别分拣,采用这种方法的设备昂贵、分拣效率低且存在辐射;另外,人工筛选矸石存在工作环境恶劣、劳动强度大、易误选或漏选的缺点。针对上述煤矸石分拣方法的缺点,开发出一种高效智能的煤矸石分拣系统及方法具有重要意义。
技术实现要素:
3.本发明的目的是提供一种基于深度学习的煤矸石识别分拣系统及方法,以解决现有的煤矸石分拣技术中分拣效率低,成本高,精度低,污染大等问题。为实现上述目标,本发明提供了一种基于深度学习的煤矸石识别分拣系统及方法,利用三维扫描仪构建煤块和矸石表面轮廓,获取尺寸和坐标信息;使用基于深度学习的目标检测技术,采集煤块和矸石的数据集图片,在卷积神经网络中训练数据集,得到检测模型,利用程序调用模型实时检测;上位机综合尺寸、坐标、类别和煤矸石传送带的速度等信息,发送指令给机械臂将矸石拣到矸石传送带上;由于煤矸石传送带上的煤矸石较厚会有重叠,因此本发明在第一次识别分拣之后,利用煤矸石传送带具有一定的倾角,配合一个振动装置,煤矸石经过振动装置,煤块振动便会向下滚动,煤块下的矸石就会露出,并随煤矸石传送带向上移动,配合另一套识别分拣装置,机械臂将矸石检出;搭建基于深度学习的实时分类识别装置,用于在开采原煤的时候识别分拣出矸石。
4.本方案包括以下装置:输送装置,利用煤矸石传送带来运输原煤;扫描装置,放在煤矸石传送带起始端,用于扫描并构建煤块和矸石的表面轮廓,获取煤块和矸石的尺寸和坐标信息;视觉识别装置,设置于三维扫描仪后方,用于识别出传送带上的煤块和矸石;分拣机器人装置,放置于视觉识别装置的后方,用于将传送带上的矸石拣出放到矸石传送带上;振动装置,设置于分拣机器人装置的后方,用于将下层重叠漏检的矸石和煤块振散开,露出矸石,便于下一轮的识别分拣;
第二个扫描装置,放在振动装置后方,用于扫描并构建煤块和矸石的表面轮廓,获取煤块和矸石的尺寸和坐标信息;第二个视觉识别装置,设置于三维扫描仪后方,用于识别出煤矸石传送带上的煤块和矸石;第二个分拣装置,放置于视觉识别装置的后面,用于将煤矸石传送带上的矸石拣出,并放到矸石传送带上;控制装置,所述控制装置包括上位机和分拣机器人控制器,上位机和三维扫描仪、视觉识别装置连接,以获取煤块和矸石的坐标、类别信息,并发送指令给机器臂执行分拣工作。
附图说明
5.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施案例及其说明用于解释本发明,并不构成对本发明的不当限定。
6.图1为本发明方法的流程图。
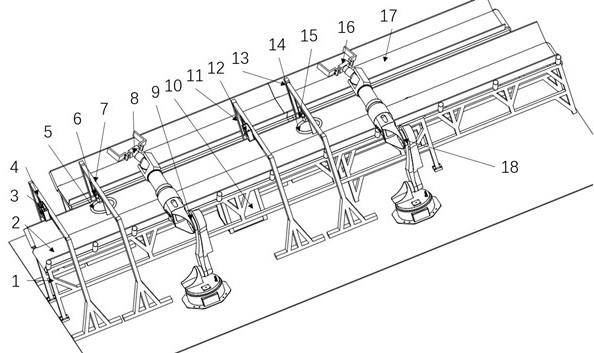
7.图2为本发明装置结构式示意图。
8.图3为本发明扫描装置结构示意图。
9.图4为本发明视觉识别装置结构示意图。
10.图5为本发明分拣装置结构示意图。
11.图6为本发明振动装置示意图。
12.图中,1为输送装置底架,2为煤矸石传送带3为三维扫描仪,4为三维扫描仪支架,5为补光灯,6为高清工业相机,7为视觉识别装置支架,8为机械臂夹手,9为机械臂,10为振动装置,11为三维扫描仪支架,12为三维扫描仪,13为视觉识别装置支架,14为补光灯,15为高清工业相机,16为机械臂夹手,17为矸石传送带,18为机械臂,19为三维扫描仪工业相机,20为相机垫片,21为线激光器,22为激光器支架,23为激光器垫片,24为机械臂转动轴,25为机械臂上臂,26为机械臂下臂,27为机械臂底盘。
具体实施方式
13.图2为本发明的装置结构示意图,包括煤矸石传送带2、用于放置三维扫描仪3的支架4、高清工业相机6、补光灯5、视觉识别装置支架7、振动装置10、矸石传送带17、煤矸石传送带2的支架1。将煤块和矸石放在煤矸石传送带2的起始端,将煤块和矸石输送至三维扫描仪3视野下,获取煤块和矸石的尺寸和坐标信息;煤矸石传送带2继续运行,将煤矸石运送到视觉识别装置的工业相机6视野下,补光灯5可使相机采集到更加清晰的图片,工业相机6将采集的图像数据实时传输到上位机,上位机中的实时检测程序调用模型对图像进行处理,识别图片中的煤块和矸石,并将类别信息反馈给上位机;上位机融合三维扫描仪3的坐标信息和视觉识别装置的类别信息,发送指令给分拣机器人控制器,然后控制器发送指令给机械臂9,机械臂9按指令移动至矸石的位置,机械臂夹手8开始工作,将矸石夹取到矸石传送带17上,矸石传送带17将矸石输送到指定位置,煤块随着煤矸石传送带2继续运输到指定位置;由于煤矸石传送带2上的煤矸石较厚会有很多重叠,因此本发明在第一次识别分拣之
后,利用煤矸石传送带具有一定的倾角,配合一个振动装置10,煤矸石经过振动装置10,上层煤块振动便会向下滚动,煤块下的矸石就会露出,并随煤矸石传送带2向上移动,再配合一套识别分拣装置获取坐标和类别信息,机械臂18将矸石拣出放到矸石传送带17上,完成煤块和矸石的分拣。
14.图3为本发明的扫描装置结构示意图,三维扫描仪3由高清工业相机19、相机垫片20、线激光器21、激光器支架22、激光器垫片23和外部结构盒组成。激光器支架22是可以根据实际情况调节激光器21和煤矸石的距离;高清工业相机19下面的孔做成了圆弧状,可以相机调节角度,使其可以和激光器21维持一定角度,构建煤块和矸石的表面轮廓。
15.图4为本发明的视觉识别装置结构示意图,由高清工业相机6、支架7、为相机提供光照的补光灯5组成。支架7可以调节相机的位置,将煤块和矸石放在高清工业相机6下,采集煤块和矸石不同姿态的大量数据集图片,标注数据集,然后将标注后的数据集在卷积神经网络中训练,在反复的迭代训练中得到高精确度的模型,再用实时程序调用检测模型对采集到的图像数据进行处理,识别图片中的煤块和矸石。
16.图5为本发明分拣装置结构示意图,由机械臂夹手16、机械臂转动轴24,机械臂上臂25,机械臂下臂26,机械臂底盘27组成;上位机结合煤块和矸石的类别、尺寸、坐标等信息发送指令给控制器,完成x向、y向、z向运动,并根据煤矸石传送带速度信息抓取矸石。
17.图6为本发明振动装置示意图,煤矸石传送带2的煤矸石会有重叠导致漏检,在一次识别分拣之后,上表层矸石已经被拣完,然后煤矸石经过振动装置,由于煤矸石传送带有一定倾角,振动后煤块滚落将下层矸石露出,然后煤矸石经过第二个识别分拣系统,将剩下的矸石拣出,大幅降低漏拣率。
18.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进、部件拆分或组合等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1