一种用于汽车玻璃球面智能检验装置的制作方法
1.本发明涉及汽车玻璃智能加工技术领域,具体是涉及一种用于汽车玻璃球面智能检验装置。
背景技术:
2.中国专利cn201911182299.6 提供一种汽车玻璃球面检测装置及其检测方法,该汽车玻璃球面检测装置可以实现汽车玻璃球面检测的自动化检测,检测效率高,且采用测距传感器获取距离信息以及采用控制装置分析计算相结合的方式,无需人工读数以及人工检测操作,获取距离信息精度高,误差小,当是该装置在检测到不合格的汽车玻璃时如何将不合格的汽车玻璃转移并没有公开,在检测到不合格玻璃后通常都是通过机械手转移,随后进行破碎处理,将不合格的汽车玻璃破碎成碎渣,以便后续回炉重造,然而转移和破碎一般都是单独进行操作,其实施时过程较为繁琐,因此,我们提出了一种能够将不合格的汽车玻璃破碎与转移一体化的汽车玻璃球面智能检验装置,以便于解决上述提出的问题。
技术实现要素:
3.基于此,有必要针对现有技术问题,提供一种用于汽车玻璃球面智能检验装置。
4.为解决现有技术问题,本发明采用的技术方案为:一种用于汽车玻璃球面智能检验装置,包括上料输送机、下料输送机、工作台、玻璃球面检测装置、玻璃定位装置、上料机械手、下料机械手、破碎装置和收集箱,上料输送机、工作台、下料输送机沿直线依序排列设置;玻璃定位装置设置于工作台上;上料机械手架设于上料输送机靠近玻璃定位装置的一端旁侧,上料机械手设有能够将上料输送机上输送的汽车玻璃移动至玻璃定位装置加工处的第一夹爪;下料机械手架设于下料输送机靠近玻璃定位装置的一端旁侧,下料机械手设有能够将玻璃定位装置上检测后的汽车玻璃移动至下料输送机上的第二夹爪;玻璃球面检测装置设置于工作台上,玻璃球面检测装置包括机架、xy轴移动机构、距离传感器和玻璃破碎器,机架设置于工作台上,工作台呈水平状设置于机架上,xy轴移动机构设置于机架上,距离传感器和玻璃破碎器分别设置于xy轴移动机构的执行部;工作台上开设有废料下料通口,破碎装置设置于废料下料通口的下方,收集箱架设于破碎装置的下方。
5.优选地,定位装置包括有第一双向丝杆滑台和第二双向丝杆滑台;第一双向丝杆滑台呈水平状设置于工作台的顶部一侧,第一双向丝杆滑台包含有两个能够相向或者相互远离的第一滑块,第一滑块上设置有呈水平状设置的第一承托治具,第一承托治具的顶部开设有与汽车玻璃边侧吻合的第一定位槽;第二双向丝杆滑台呈水平状设置于工作台的顶部的另一侧,第二双向丝杆滑台与第一双向丝杆滑台呈平行状设置,第二双向丝杆滑台包含有两个能够相向或者相互远离的
第二滑块,第二滑块上设置有呈水平状设置的第二承托治具,第二承托治具的顶部开设有与汽车玻璃边侧吻合的第二定位槽。
6.优选地,第一承托治具的第一定位槽内包裹有第一橡胶垫,第二承托治具的第二定位槽内包裹有第二橡胶垫。
7.优选地,xy轴移动机构包括有x轴直线滑台和y轴直线滑台;x轴直线滑台呈水平状设置于机架的顶部;y轴直线滑台呈水平状设置于x轴直线滑台的执行部,y轴直线滑台的输送方向与x轴的输送方向垂直设置,y轴直线滑台的执行部设置有安装支架,距离传感器呈竖直状固定安装于安装支架的底部,玻璃破碎器设置于安装支架的一侧。
8.优选地,玻璃球面检测装置还包括有直线驱动器,直线驱动器呈竖直状设置于安装支架的一侧,直线驱动器的输出端朝向下设置,直线驱动器的输出端设置有升降板,玻璃破碎器呈竖直状设置于升降板的底部。
9.优选地,破碎装置包括有支撑台、破碎箱、第一电机、进料通道、破碎辊、第一齿轮和第二齿轮;机架呈竖直设置于支撑台上;破碎箱呈水平状设置于支撑台上,破碎箱的上端设有进料口,破碎箱的下端设置有出料口,支撑台上设有与出料口对应的导料口;破碎辊具有一对,两个破碎辊平行并且能够方向旋转的设置于破碎辊的内部,破碎辊的两端分别设置有转轴,转轴能够转动的穿过破碎箱的侧壁并且向外延伸设置;第一齿轮与第二齿轮分别同轴设置于两个相邻的转轴上,第一齿轮与第二齿轮啮合设置;第一电机设置于支撑台上,第一电机的输出轴与其中一个转轴的一端传动连接;进料通道设置于破碎箱的进料口处,进料通道为漏斗状,进料通道的上端外部与废料下料通口的内侧设有预设距离,且进料通道的上端开口与废料下料通口对接设置。
10.优选地,进料通道的外部设有围绕进料通道外部的挡板,挡板的两侧分别设有升降装置,升降装置设置于工作台的底部,挡板通过升降装置能够沿工作台的下方朝工作台的上方自下而上移动的设置于进料通道的外部,汽车玻璃的形状小于挡板的内部轮廓。
11.优选地,挡板的每个拐角处均设有呈竖直设置的限位柱,工作台的底部设置有与每个限位柱一一对应的限位块,每个限位块上均设置有供每个限位柱移动的限位槽。
12.优选地,每个升降装置均包括有第二电机、固定架、主动齿轮和齿条;主动齿条呈竖直状设置于挡板的一侧中心处,主动齿条的长度等于挡板的高度;固定架固定安装在工作台的底部;主动齿轮能够转动的设置于固定架上,且主动齿轮与齿条啮合设置;第二电机设置于固定架上,第二电机的输出端与齿轮的中心处传动连接。
13.优选地,收集箱的底部每个拐角处均设置有万向轮。
14.本技术相比较于现有技术的有益效果是:1.本发明通过玻璃破碎器将不合格的汽车玻璃进行破碎,破碎后的玻璃渣顺着废料下料通口进入到破碎装置内,并启动破碎装置,通过破碎装置将玻璃碎渣进行破碎,破碎后的玻璃料通过破碎装置下方设置的收集箱进行收集,便于将不合格的玻璃回炉重造,解
决了如何回收不合格的汽车玻璃的技术问题。
15.2.本发明通过第一双向丝杆滑台控制两个第一滑块相向移动到预设位置,通过第二双向丝杆滑台控制两个第二滑块相向移动到预设位置,同时带动两个第一承托治具和两个第二承托治具移动,通过两个第一承托治具以及两个第二承托治具的将汽车玻璃的四边承托,通过第一承托治具上设置的第一定位槽以及第二承托治具上设置的第二定位槽将汽车玻璃的边进行固定,从而固定汽车玻璃,解决了如何通过定位装置固定汽车玻璃的技术问题。
16.3.本发明通过第一承托治具上的第一定位槽内设置的第一橡胶垫可弹性抵接汽车玻璃的侧边,同样,通过第二承托治具上的第二定位定位槽内设置的第二橡胶垫可弹性抵接汽车玻璃的侧边,增加了第一承托治具与第二承托治具固定汽车玻璃的接触面积,并且避免损伤汽车玻璃,解决了如何进一步的通过第一承托治具以及第二承托治具固定汽车玻璃的技术问题。
17.4.本发明通过x轴直线滑台驱动y轴直线滑台沿着x轴线方向平行移动,通过y轴直线滑台驱动安装支架、距离传感器以及玻璃破碎器沿着y轴线方向平行移动,从而实现了距离传感器沿着汽车玻璃上表面全方位移动的功能,解决了如何通过xy轴移动机构驱动距离传感器沿着汽车玻璃上表面移动的技术问题。
18.5.本发明通过直线驱动器驱动玻璃破碎器朝下移动,使玻璃破碎器的执行部能够与汽车玻璃的表面接触,当玻璃破碎器靠近汽车玻璃时,通过玻璃破碎器的执行部将汽车玻璃敲碎,解决了如何将玻璃破碎器靠近汽车玻璃的技术问题。
19.6.本发明通过第一电机驱动其中一个转轴旋转,该转轴驱动相应的破碎辊旋转,通过第一齿轮与第二齿轮相互配合,使另外一个破碎辊旋转,致使两个破碎辊反向旋转,通过两个反向旋转的破碎辊将破碎的汽车玻璃再次进行破碎,破碎后的玻璃通过出料口和导料口排到收集箱内,并通过收集箱进行收集,解决了如何通过破碎装置将汽车玻璃进行破碎的技术问题。
20.7.本发明通过两个升降装置的执行部驱动挡板自下而上移动,使挡板围绕汽车玻璃,在破碎过程中,所有的第一承托治具和所有的第二承托治具分别松开汽车玻璃,从而让挡板更好的移动,破碎时,碎渣通过挡板抵挡,避免碎渣飞溅到地面,造成安全隐患,解决了如何在玻璃破碎器破碎时抵挡虽玻璃飞溅的地面的技术问题。
21.8.本发明通过挡板每个拐角处设置的限位柱沿着相应的限位块上的限位槽限位移动,进而使挡板能够更加流畅的上下移动,解决了如何限制挡板上下移动的技术问题。
22.9.本发明通过第二电机驱动主动齿轮旋转,主动齿轮旋转并以啮合的方式使齿条移动,同时带动挡板移动,解决了如何驱动挡板上下移动的技术问题。
23.10.本发明通过收集箱底部设置额度万向轮,便于收集箱移动,从而更好的让工作人员收集汽车玻璃碎渣,解决了如何移动收集箱的技术问题。
附图说明
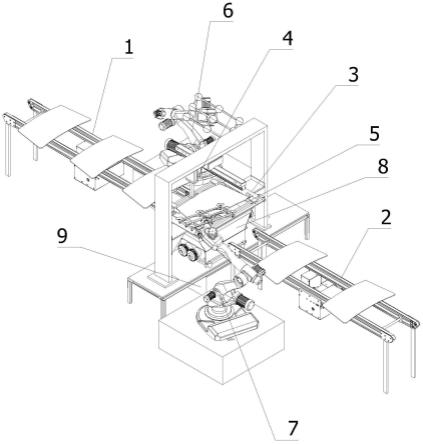
24.图1是实施例的立体结构示意图一;图2是实施例的立体结构示意图二;图3是实施例的结构俯视图;
图4是实施例的局部立体结构示意图一;图5是实施例的局部立体结构示意图二;图6是实施例的局部主视图;图7是实施例的玻璃球面检测装置的局部立体结构示意图;图8是实施例的玻璃定位装置的局部立体结构示意图一;图9是实施例的玻璃定位装置的局部立体结构示意图二;图10是实施例的玻璃定位装置的局部立体结构示意图三;图11是实施例的破碎装置的局部立体结构示意图;图12是实施例的收集箱的立体结构示意图。
25.图中标号为:1-上料输送机;2-下料输送机;3-工作台;4-玻璃球面检测装置;5-玻璃定位装置;6-上料机械手;7-下料机械手;8-破碎装置;9-收集箱;10-第一夹爪;11-第二夹爪;12-机架;13-xy轴移动机构;14-距离传感器;15-玻璃破碎器;16-废料下料通口;17-第一双向丝杆滑台;18-第二双向丝杆滑台;19-第一滑块;20-第一承托治具;21-第二滑块;22-第二承托治具;23-第一橡胶垫;24-第二橡胶垫;25-x轴直线滑台;26-y轴直线滑台;27-安装支架;28-直线驱动器;29-支撑台;30-破碎箱;31-第一电机;32-进料通道;33-破碎辊;34-第一齿轮;35-第二齿轮;36-挡板;37-限位柱;38-限位块;39-第二电机;40-固定架;41-主动齿轮;42-齿条;43-万向轮。
具体实施方式
26.为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本发明作进一步详细描述。
27.如图1至图12所示,本技术提供:一种用于汽车玻璃球面智能检验装置,包括上料输送机1、下料输送机2、工作台3、玻璃球面检测装置4、玻璃定位装置5、上料机械手6、下料机械手7、破碎装置8和收集箱9,上料输送机1、工作台3、下料输送机2沿直线依序排列设置;玻璃定位装置5设置于工作台3上;上料机械手6架设于上料输送机1靠近玻璃定位装置5的一端旁侧,上料机械手6设有能够将上料输送机1上输送的汽车玻璃移动至玻璃定位装置5加工处的第一夹爪10;下料机械手7架设于下料输送机2靠近玻璃定位装置5的一端旁侧,下料机械手7设有能够将玻璃定位装置5上检测后的汽车玻璃移动至下料输送机2上的第二夹爪11;玻璃球面检测装置4设置于工作台3上,玻璃球面检测装置4包括机架12、xy轴移动机构13、距离传感器14和玻璃破碎器15,机架12设置于工作台3上,工作台3呈水平状设置于机架12上,xy轴移动机构13设置于机架12上,距离传感器14和玻璃破碎器15分别设置于xy轴移动机构13的执行部;工作台3上开设有废料下料通口16,破碎装置8设置于废料下料通口16的下方,收集箱9架设于破碎装置8的下方。
28.基于上述实施例,本技术想要解决的技术问题是如何回收不合格的汽车玻璃,并便于后期回炉重造。为此,本技术通过上料输送机1依序的将待检测的汽车玻璃输送,通过上料机械手6将上料输送机1上输送的汽车玻璃移动至工作台3上的加工处,并通过玻璃定
位装置5将汽车玻璃呈水平状进行固定,当汽车玻璃固定后,通过xy轴移动机构13驱动距离传感器14沿着汽车玻璃的表面进行检测,采用距离传感器14获取距离信息,并将得到的信息传输给后台控制器,通过后台控制器计算汽车玻璃球面值是否复合要求,当检测结果合格时,玻璃定位装置5松开汽车玻璃,并通过下料机械手7上的第二夹爪11将合格的汽车玻璃移动至下料输送机2上,并通过下料输送机2将其进行输送,便于后期镀膜,当检测结果不合格时,通过玻璃破碎器15将不合格的汽车玻璃进行破碎,破碎后的玻璃渣顺着废料下料通口16进入到破碎装置8内,并启动破碎装置8,通过破碎装置8将玻璃碎渣进行破碎,破碎后的玻璃料通过破碎装置8下方设置的收集箱9进行收集,便于将不合格的玻璃回炉重造。
29.进一步的:定位装置包括有第一双向丝杆滑台17和第二双向丝杆滑台18;第一双向丝杆滑台17呈水平状设置于工作台3的顶部一侧,第一双向丝杆滑台17包含有两个能够相向或者相互远离的第一滑块19,第一滑块19上设置有呈水平状设置的第一承托治具20,第一承托治具20的顶部开设有与汽车玻璃边侧吻合的第一定位槽;第二双向丝杆滑台18呈水平状设置于工作台3的顶部的另一侧,第二双向丝杆滑台18与第一双向丝杆滑台17呈平行状设置,第二双向丝杆滑台18包含有两个能够相向或者相互远离的第二滑块21,第二滑块21上设置有呈水平状设置的第二承托治具22,第二承托治具22的顶部开设有与汽车玻璃边侧吻合的第二定位槽。
30.基于上述实施例,本技术想要解决的技术问题是如何通过定位装置固定汽车玻璃。为此,本技术通过第一双向丝杆滑台17控制两个第一滑块19相向移动到预设位置,通过第二双向丝杆滑台18控制两个第二滑块21相向移动到预设位置,同时带动两个第一承托治具20和两个第二承托治具22移动,通过两个第一承托治具20以及两个第二承托治具22的将汽车玻璃的四边承托,通过第一承托治具20上设置的第一定位槽以及第二承托治具22上设置的第二定位槽将汽车玻璃的边进行固定,从而固定汽车玻璃。
31.进一步的:第一承托治具20的第一定位槽内包裹有第一橡胶垫23,第二承托治具22的第二定位槽内包裹有第二橡胶垫24。
32.基于上述实施例,本技术想要解决的技术问题是如何进一步的通过第一承托治具20以及第二承托治具22固定汽车玻璃。为此,本技术通过第一承托治具20上的第一定位槽内设置的第一橡胶垫23可弹性抵接汽车玻璃的侧边,同样,通过第二承托治具22上的第二定位定位槽内设置的第二橡胶垫24可弹性抵接汽车玻璃的侧边,增加了第一承托治具20与第二承托治具22固定汽车玻璃的接触面积,并且避免损伤汽车玻璃。
33.进一步的:xy轴移动机构13包括有x轴直线滑台25和y轴直线滑台26;x轴直线滑台25呈水平状设置于机架12的顶部;y轴直线滑台26呈水平状设置于x轴直线滑台25的执行部,y轴直线滑台26的输送方向与x轴的输送方向垂直设置,y轴直线滑台26的执行部设置有安装支架27,距离传感器14呈竖直状固定安装于安装支架27的底部,玻璃破碎器15设置于安装支架27的一侧。
34.基于上述实施例,本技术想要解决的技术问题是如何通过xy轴移动机构13驱动距离传感器14沿着汽车玻璃上表面移动。为此,本技术通过x轴直线滑台25驱动y轴直线滑台
26沿着x轴线方向平行移动,通过y轴直线滑台26驱动安装支架27、距离传感器14以及玻璃破碎器15沿着y轴线方向平行移动,从而实现了距离传感器14沿着汽车玻璃上表面全方位移动的功能。
35.进一步的:玻璃球面检测装置4还包括有直线驱动器28,直线驱动器28呈竖直状设置于安装支架27的一侧,直线驱动器28的输出端朝向下设置,直线驱动器28的输出端设置有升降板,玻璃破碎器15呈竖直状设置于升降板的底部。
36.基于上述实施例,本技术想要解决的技术问题是如何将玻璃破碎器15靠近汽车玻璃。为此,本技术通过直线驱动器28驱动玻璃破碎器15朝下移动,使玻璃破碎器15的执行部能够与汽车玻璃的表面接触,当玻璃破碎器15靠近汽车玻璃时,通过玻璃破碎器15的执行部将汽车玻璃敲碎。
37.进一步的:破碎装置8包括有支撑台29、破碎箱30、第一电机31、进料通道32、破碎辊33、第一齿轮34和第二齿轮35;机架12呈竖直设置于支撑台29上;破碎箱30呈水平状设置于支撑台29上,破碎箱30的上端设有进料口,破碎箱30的下端设置有出料口,支撑台29上设有与出料口对应的导料口;破碎辊33具有一对,两个破碎辊33平行并且能够方向旋转的设置于破碎辊33的内部,破碎辊33的两端分别设置有转轴,转轴能够转动的穿过破碎箱30的侧壁并且向外延伸设置;第一齿轮34与第二齿轮35分别同轴设置于两个相邻的转轴上,第一齿轮34与第二齿轮35啮合设置;第一电机31设置于支撑台29上,第一电机31的输出轴与其中一个转轴的一端传动连接;进料通道32设置于破碎箱30的进料口处,进料通道32为漏斗状,进料通道32的上端外部与废料下料通口16的内侧设有预设距离,且进料通道32的上端开口与废料下料通口16对接设置。
38.基于上述实施例,本技术想要解决的技术问题是如何通过破碎装置8将汽车玻璃进行破碎。为此,本技术通过第一电机31驱动其中一个转轴旋转,该转轴驱动相应的破碎辊33旋转,通过第一齿轮34与第二齿轮35相互配合,使另外一个破碎辊33旋转,致使两个破碎辊33反向旋转,通过两个反向旋转的破碎辊33将破碎的汽车玻璃再次进行破碎,破碎后的玻璃通过出料口和导料口排到收集箱9内,并通过收集箱9进行收集。
39.进一步的:进料通道32的外部设有围绕进料通道32外部的挡板36,挡板36的两侧分别设有升降装置,升降装置设置于工作台3的底部,挡板36通过升降装置能够沿工作台3的下方朝工作台3的上方自下而上移动的设置于进料通道32的外部,汽车玻璃的形状小于挡板36的内部轮廓。
40.基于上述实施例,本技术想要解决的技术问题是如何在玻璃破碎器15破碎时抵挡虽玻璃飞溅的地面。为此,本技术通过两个升降装置的执行部驱动挡板36自下而上移动,使
挡板36围绕汽车玻璃,在破碎过程中,所有的第一承托治具20和所有的第二承托治具22分别松开汽车玻璃,从而让挡板36更好的移动,破碎时,碎渣通过挡板36抵挡,避免碎渣飞溅到地面,造成安全隐患。
41.进一步的:挡板36的每个拐角处均设有呈竖直设置的限位柱37,工作台3的底部设置有与每个限位柱37一一对应的限位块38,每个限位块38上均设置有供每个限位柱37移动的限位槽。
42.基于上述实施例,本技术想要解决的技术问题是如何限制挡板36上下移动。为此,本技术通过挡板36每个拐角处设置的限位柱37沿着相应的限位块38上的限位槽限位移动,进而使挡板36能够更加流畅的上下移动。
43.进一步的:每个升降装置均包括有第二电机39、固定架40、主动齿轮41和齿条42;主动齿条42呈竖直状设置于挡板36的一侧中心处,主动齿条42的长度等于挡板36的高度;固定架40固定安装在工作台3的底部;主动齿轮41能够转动的设置于固定架40上,且主动齿轮41与齿条42啮合设置;第二电机39设置于固定架40上,第二电机39的输出端与齿轮的中心处传动连接。
44.基于上述实施例,本技术想要解决的技术问题是如何驱动挡板36上下移动。为此,本技术通过第二电机39驱动主动齿轮41旋转,主动齿轮41旋转并以啮合的方式使齿条42移动,同时带动挡板36移动。
45.进一步的:收集箱9的底部每个拐角处均设置有万向轮43。
46.基于上述实施例,本技术想要解决的技术问题是如何移动收集箱9。为此,本技术通过收集箱9底部设置额度万向轮43,便于收集箱9移动,从而更好的让工作人员收集汽车玻璃碎渣。
47.本技术通过玻璃破碎器15将不合格的汽车玻璃进行破碎,破碎后的玻璃渣顺着废料下料通口16进入到破碎装置8内,并启动破碎装置8,通过破碎装置8将玻璃碎渣进行破碎,破碎后的玻璃料通过破碎装置8下方设置的收集箱9进行收集,便于将不合格的玻璃回炉重造,解决了如何回收不合格的汽车玻璃的技术问题。
48.以上实施例仅表达了本发明的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1