物品选剔系统的制作方法
1.本实用新型涉及机械自动化领域,尤其涉及一种物品选剔系统。
背景技术:
2.在微型断路器的生产线上,组装完成的产品需要在退螺丝后对产品性能进行测试,有些产品存在螺丝没退到位的情况,导致测试无法进行且易损坏测试设备。在测试前人工剔除这些螺丝没退到位的产品耗时较长。
技术实现要素:
3.本实用新型的目的是提供一种物品选剔系统,可自动剔除不符合要求的物品。
4.本实用新型提供了一种物品选剔系统,其包括一个输送装置、一个架体、一个图像获取装置、一个分析模块、一个剔料装置和一个控制模块。输送装置能够将物品先后输送至一个检测位置和一个剔料位置。架体固设于输送装置。图像获取装置设置于架体且能够获取位于检测位置的物品的图像。分析模块信号连接图像获取装置。剔料装置设置于架体且能够将位于剔料位置的物品移出输送装置。控制模块信号连接分析模块和剔料装置。
5.该物品选剔系统能够获取物品的图像,并根据对图像的分析结果剔除不符合要求的物品,可提高物品选剔的自动化水平。
6.在物品选剔系统的另一种示意性实施方式中,图像获取装置能够生成实际图像数据。分析模块内储存有目标图像数据。分析模块能够分析实际图像数据与目标图像数据是否匹配。分析模块能够在分析结果为不匹配时生成剔料信号。控制模块被配置为能够根据剔料信号控制剔料装置将位于剔料位置的物品移出输送装置。
7.在物品选剔系统的另一种示意性实施方式中,输送装置为带式输送机或滚轮式输送机。输送装置能够沿一个承载方向承载物品并能够沿垂直于承载方向的输送方向输送承载于其上的物品。借此利于节省成本。
8.在物品选剔系统的再一种示意性实施方式中,物品选剔系统还包括一个第一止挡件和一个第一止挡驱动机构。第一止挡件沿承载方向可运动地设置于架体。第一止挡件具有两个第一止挡臂。两个第一止挡臂能够沿承载方向分别伸出至输送装置的两侧,以将物品止挡于检测位置。第一止挡驱动机构能够驱动第一止挡件相对于架体运动。控制模块被配置为能够控制第一止挡驱动机构。通过设置第一止挡件和第一止挡驱动机构可将物品止挡于检测位置,利于图像获取装置获取清晰准确的图像。
9.在物品选剔系统的还一种示意性实施方式中,物品选剔系统还包括一个第二止挡件和一个第二止挡驱动机构。第二止挡件沿承载方向可运动地设置于架体。第二止挡件具有两个第二止挡臂。两个第二止挡臂能够沿承载方向分别伸出至输送装置的两侧,以将物品止挡于剔料位置。第二止挡驱动机构能够驱动第二止挡件相对于架体运动。控制模块被配置为能够控制第二止挡驱动机构。通过设置第二止挡件和第二止挡驱动机构可将物品止挡于剔料位置,利于剔料装置准确地将被止挡于剔料位置的物品沿宽度方向推出输送装
置。
10.在物品选剔系统的还一种示意性实施方式中,位于检测位置的物品能够将位于其上游的一个物品抵止于一个等待位置。物品选剔系统还包括一个夹持件和一个夹持驱动机构。夹持件沿输送装置的垂直于承载方向和输送方向的宽度方向可运动地设置于架体。架体包括一个第一挡板。第一挡板和夹持件沿宽度方向相对地设置于输送装置的两侧。夹持件能够沿宽度方向朝向第一挡板运动,以与第一挡板夹持位于等待位置的物品。夹持驱动机构能够驱动夹持件相对于架体运动。控制模块被配置为能够控制夹持驱动机构。借此可便于准确地将物品逐一地止挡于检测位置。
11.在物品选剔系统的还一种示意性实施方式中,剔料装置包括一个抵推件和一个剔料驱动机构。抵推件沿输送装置的垂直于承载方向和输送方向的宽度方向可运动地设置于架体。抵推件能够将位于剔料位置的物品沿宽度方向推出输送装置。剔料驱动机构能够驱动抵推件相对于架体运动。该结构简单且稳定性较好。
12.在物品选剔系统的还一种示意性实施方式中,物品选剔系统还包括一个排料滑道。排料滑道用于接收被抵推件推出输送装置的物品。借此可便于被剔除物品的集中处理。
13.在物品选剔系统的还一种示意性实施方式中,架体包括一个第一挡板和一个第二挡板。第一挡板和第二挡板分别设置于输送装置的垂直于承载方向和输送方向的宽度方向的两侧,以与输送装置围成一个沿输送装置的输送轨迹延伸的容物槽。借此利于防止物品掉落。
14.在物品选剔系统的还一种示意性实施方式中,物品选剔系统还包括一个第一在位传感器。第一在位传感器朝向检测位置设置且信号连接控制模块。
15.在物品选剔系统的还一种示意性实施方式中,第一在位传感器能够检测检测位置有无物品并能够在检测到有物品时向控制模块发送第一在位信号。控制模块能够在收到第一在位信号时向图像获取装置发送图像获取信号。图像获取装置能够在收到图像获取信号时获取图像并生成实际图像数据。借此可当物品到达检测位置时自动启动图像获取装置的图像获取功能,利于提高自动化程度。
16.在物品选剔系统的还一种示意性实施方式中,物品选剔系统还包括一个第二在位传感器。第二在位传感器朝向剔料位置设置且信号连接控制模块。
17.在物品选剔系统的还一种示意性实施方式中,第二在位传感器能够检测剔料位置有无物品并能够在检测到有物品时向控制模块发送第二在位信号。控制模块能够在收到第二在位信号时控制剔料装置将位于剔料位置的物品移出输送装置。借此可当需要剔除的物品到达剔料位置时自动启动剔料装置,利于提高自动化程度。
18.在物品选剔系统的还一种示意性实施方式中,图像获取装置为图像识别传感器。
19.在物品选剔系统的还一种示意性实施方式中,物品选剔系统设置有数个图像获取装置,以获取位于检测位置的物品的数个角度的图像。
20.在物品选剔系统的还一种示意性实施方式中,控制模块为可编程逻辑控制器。
21.在物品选剔系统的还一种示意性实施方式中,第一止挡驱动机构、第二止挡驱动机构、夹持驱动机构、剔料驱动机构均为气缸。
22.在物品选剔系统的还一种示意性实施方式中,第一在位传感器和第二在位传感器为光电传感器。
附图说明
23.以下附图仅对本实用新型做示意性说明和解释,并不限定本实用新型的范围。
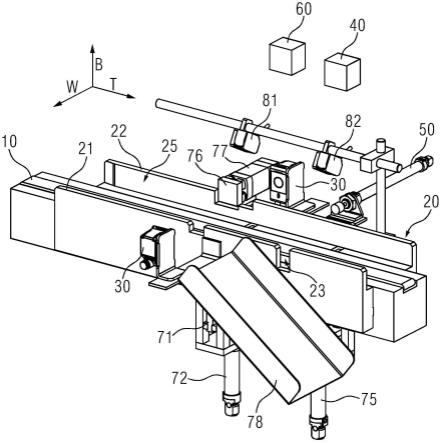
24.图1为物品选剔系统的一种示意性实施方式的结构示意图。
25.图2为图1所示的物品选剔系统的部分结构的俯视图。
26.图3为图1所示的物品选剔系统的部分结构沿图2中
ⅲ‑ⅲ
的局部剖视图。
27.图4为图3所示结构的变化状态图。
28.图5为图1所示的物品选剔系统的部分结构沿图2中
ⅳ‑ⅳ
的局部剖视图。
29.图6为用于说明图1所示的物品选剔系统的信号连接关系的示意图。
30.标号说明
31.10输送装置
32.20架体
33.21第一挡板
34.22第二挡板
35.23剔料缺口
36.25容物槽
37.30图像获取装置
38.40分析模块
39.50剔料装置
40.51抵推件
41.52剔料驱动机构
42.60控制模块
43.71第一止挡件
44.711第一止挡臂
45.72第一止挡驱动机构
46.74第二止挡件
47.741第二止挡臂
48.75第二止挡驱动机构
49.76夹持件
50.77夹持驱动机构
51.78排料滑道
52.81第一在位传感器
53.82第二在位传感器
54.90物品
55.b承载方向
56.t输送方向
57.w宽度方向
具体实施方式
58.为了对实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本
实用新型的具体实施方式,在各图中相同的标号表示结构相同或结构相似但功能相同的部件。
59.在本文中,“示意性”表示“充当实例、例子或说明”,不应将在本文中被描述为“示意性”的任何图示、实施方式解释为一种更优选的或更具优点的技术方案。
60.在本文中,“第一”、“第二”等并非表示其重要程度或顺序等,仅用于表示彼此的区别,以利文件的描述。
61.为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。
62.图1为物品选剔系统的一种示意性实施方式的结构示意图。图2为图1所示的物品选剔系统的部分结构的俯视图。如图1和图2所示,物品选剔系统包括一个输送装置10、一个架体20、两个图像获取装置30、一个分析模块40、一个剔料装置50和一个控制模块60。架体20固设于输送装置10。图像获取装置30和剔料装置50设置于架体20,架体20起各部件的连接和支撑作用。在本示意性实施方式的描述过程中,以微型断路器作为物品的具体实例来辅助说明,其并非用于限定本实用新型的保护范围。
63.在本示意性实施方式中,输送装置10设置为带式输送机,其能够沿承载方向b承载物品90并能够沿垂直于承载方向b的输送方向t输送承载于其上的物品90。带式输送机的成本较低。但不限于此,在其他示意性实施方式中,输送装置10也可以是滚轮式输送机或其他能够输送物品的设备。
64.如图2所示,输送装置10能够将物品90沿输送方向t先后输送至一个检测位置(沿输送方向t的第三个物品90即位于检测位置)和一个剔料位置(沿输送方向t的第四个物品90即位于剔料位置)。
65.图像获取装置30能够获取位于检测位置的物品90的图像并生成实际图像数据。如图2所示,在本示意性实施方式中,两个图像获取装置30分别位于输送装置10的沿输送装置10的宽度方向w的两侧,其中宽度方向w垂直于承载方向b和输送方向t,以分别从物品90的沿宽度方向w的两侧获取图像,其例如分别对应于微型断路器两侧的螺丝孔。但不限于此,在其他示意性实施方式中,图像获取装置30的数量和拍摄角度可根据需要调整。图像获取装置30例如为图像识别传感器,但不限于此。
66.剔料装置50能够将位于剔料位置的物品90移出输送装置10。具体地,在本示意性实施方式中,剔料装置50包括一个抵推件51和一个剔料驱动机构52。抵推件51沿输送装置10的宽度方向w可运动地设置于架体20。抵推件51能够将位于剔料位置的物品90沿宽度方向w推出输送装置10。剔料驱动机构52能够驱动抵推件51相对于架体20运动,其例如为气缸,抵推件51例如固定于剔料驱动机构52的活塞杆,但不限于此。该剔料装置50结构简单且稳定性较好,但不限于此。
67.分析模块40内储存有目标图像数据,目标图像数据为符合要求的物品对应的图像数据,具体例如为微型断路器在螺丝退到位的情况下两侧的螺丝孔对应的图像数据。分析模块40能够分析实际图像数据与目标图像数据是否匹配。分析模块40能够在分析结果为不匹配时生成剔料信号。具体例如为,在微型断路器的螺丝未退到位的情况下,分析模块40的分析结果为实际图像数据与目标图像数据不匹配,分析模块40生成剔料信号;在微型断路器的螺丝退到位的情况下,分析模块40的分析结果为实际图像数据与目标图像数据匹配,
分析模块40不生成剔料信号。
68.控制模块60被配置为能够根据剔料信号控制剔料驱动机构52动作,以在与该剔料信号对应的物品90被输送装置10输送至剔料位置时,抵推件51在剔料驱动机构52的驱动下将位于剔料位置的物品90沿宽度方向w推出输送装置10。
69.该物品选剔系统能够获取物品的图像,并根据对图像的分析结果剔除不符合要求的物品,利于提高物品选剔的自动化水平。
70.图3为图1所示的物品选剔系统的部分结构沿图2中
ⅲ‑ⅲ
的剖视图。如图2和图3所示,在示意性实施方式中,物品选剔系统还包括一个第一止挡件71和一个第一止挡驱动机构72。第一止挡件71沿承载方向b可运动地设置于架体20。第一止挡件71具有两个第一止挡臂711。两个第一止挡臂711能够沿承载方向b分别伸出至输送装置10的两侧,以将物品90止挡于检测位置,其也能够沿承载方向b的反方向缩回以避让物品90。图3显示了两个第一止挡臂711缩回以避让物品90的状态,图4为图3所示结构的变化状态图,其显示了两个第一止挡臂711伸出并将物品90止挡于检测位置的状态。第一止挡驱动机构72能够驱动第一止挡件71相对于架体20运动,其例如为气缸,但不限于此。控制模块60被配置为能够控制第一止挡驱动机构72。通过设置第一止挡件71和第一止挡驱动机构72可将物品90止挡于检测位置,利于图像获取装置30获取清晰准确的图像。
71.图5为图1所示的物品选剔系统的部分结构沿图2中
ⅳ‑ⅳ
的剖视图。如图2和图5所示,在示意性实施方式中,物品选剔系统还包括一个第二止挡件74和一个第二止挡驱动机构75。第二止挡件74沿承载方向b可运动地设置于架体20。第二止挡件74具有两个第二止挡臂741。两个第二止挡臂741能够沿承载方向b分别伸出至输送装置10的两侧,以将物品90止挡于剔料位置,其也能够沿承载方向b的反方向缩回以避让物品90,图5即显示了两个第二止挡臂741伸出并将物品90止挡于剔料位置的状态。第二止挡驱动机构75能够驱动第二止挡件74相对于架体20运动,其例如为气缸,但不限于此。控制模块60被配置为能够控制第二止挡驱动机构75。通过设置第二止挡件74和第二止挡驱动机构75可将物品90止挡于剔料位置,利于剔料装置50准确地将被止挡于剔料位置的物品90沿宽度方向w推出输送装置10。
72.如图2所示,在示意性实施方式中,位于检测位置的物品90(沿输送方向t的第三个物品90即位于检测位置)能够将位于其上游的一个物品90抵止于一个等待位置(沿输送方向t的第二个物品90即位于等待位置)。物品选剔系统还包括一个夹持件76和一个夹持驱动机构77。夹持件76沿宽度方向w可运动地设置于架体20。架体20包括一个第一挡板21。第一挡板21和夹持件76沿宽度方向w相对地设置于输送装置10的两侧。夹持件76能够沿宽度方向w朝向第一挡板21运动,以与第一挡板21夹持位于等待位置的物品90(除此之外,夹持件76和第一挡板21例如也可同时夹持被位于等待位置的物品90抵止的物品90,即沿输送方向t的第一个物品90)。夹持驱动机构77能够驱动夹持件76相对于架体20运动,其例如为气缸,夹持件76例如固定于夹持驱动机构77的活塞杆,但不限于此。控制模块60被配置为能够控制夹持驱动机构77。在第一止挡臂711缩回以释放位于检测位置的物品90时,夹持件76和第一挡板21夹持位于等待位置的物品90,可使位于等待位置的物品90维持在等待位置,待第一止挡臂711再次伸出后再予以释放。借此可便于准确地将物品逐一地止挡于检测位置。
73.如图1所示,在示意性实施方式中,物品选剔系统还包括一个第一在位传感器81。第一在位传感器81能够检测检测位置有无物品并能够在检测到有物品时向控制模块60发
送第一在位信号。控制模块60能够在收到第一在位信号时向图像获取装置30发送图像获取信号。图像获取装置30能够在收到图像获取信号时获取图像并生成实际图像数据。借此可当物品到达检测位置时自动启动图像获取装置30的图像获取功能,利于提高自动化程度。第一在位传感器81例如为光电传感器,但不限于此。
74.如图1所示,在示意性实施方式中,物品选剔系统还包括一个第二在位传感器82。第二在位传感器82能够检测剔料位置有无物品并能够在检测到有物品时向控制模块60发送第二在位信号。控制模块60能够在收到第二在位信号时根据剔料信号控制剔料装置50将位于剔料位置的物品90移出输送装置10。借此可当需要剔除的物品到达剔料位置时自动启动剔料装置50,利于提高自动化程度。第二在位传感器82例如为光电传感器,但不限于此。
75.图6为用于说明图1所示的物品选剔系统的信号连接关系的示意图。控制模块60可以被适当地配置以实现:
76.物品90到达检测位置并被两个伸出的第一止挡臂711止挡于检测位置,随后图像获取装置30获取位于检测位置的物品90的图像并生成实际图像数据,分析模块40分析实际图像数据与目标图像数据是否匹配;
77.若匹配,第一止挡臂711缩回以释放物品90,同时夹持件76与第一挡板21夹持位于等待位置的物品90以使其保持在等待位置,当自检测位置释放的物品90运动至第一止挡臂711下游(即图2中第一止挡件71的右侧)时,第一止挡臂711伸出且夹持件76缩回以释放位于等待位置的物品90使其向前运动至检测位置;
78.若不匹配,第一止挡臂711缩回以释放物品90,同时夹持件76与第一挡板21夹持位于等待位置的物品90以使其保持在等待位置,同时第二止挡臂741伸出以将自检测位置释放的物品90拦截于剔料位置,当自检测位置释放的物品90运动至第一止挡臂711下游(即图2中第一止挡件71的右侧)时,第一止挡臂711伸出且夹持件76缩回以释放位于等待位置的物品90,当自检测位置释放的物品90到达剔料位置后,抵推件51伸出以将位于剔料位置的物品90推出输送装置10,然后第二止挡臂741缩回。
79.如图1和图2所示,在示意性实施方式中,物品选剔系统还包括一个排料滑道78。排料滑道78用于接收被抵推件51推出输送装置10的物品。借此可便于被剔除物品的集中处理。
80.如图1和图2所示,在示意性实施方式中,第一挡板21具有一个剔料缺口23。剔料缺口23与位于剔料位置的物品90沿宽度方向w对应,位于剔料位置的物品90在抵推件51的推动下沿宽度方向w穿过剔料缺口23到达排料滑道78。
81.如图1和图2所示,在示意性实施方式中,架体20还包括一个第二挡板22。第一挡板21和第二挡板22分别设置于输送装置10的宽度方向w的两侧,以与输送装置10围成一个沿输送装置10的输送轨迹延伸的容物槽25。借此利于防止物品掉落。
82.在示意性实施方式中,控制模块60例如为可编程逻辑控制器,但不限于此。
83.在示意性实施方式中,第一止挡驱动机构72、第二止挡驱动机构75、夹持驱动机构77、剔料驱动机构52均为气缸。但不限于此,在其他示意性实施方式中,也可以为直线电机等其他驱动机构。
84.应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说
明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
85.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施例的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方案或变更,如特征的组合、分割或重复,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1