一种物流分拣系统及分拣方法
本发明涉及物流分拣,具体而言,涉及一种物流分拣系统及分拣方法。
背景技术:
1、随着科技的发展和生活水平的进步,越来越多的人习惯于通过互联网来进行购物,这也促进了物流行业的快速发展。如何准确快速的对包裹进行分拣是物流行业需要考虑的一个问题。现有技术中,物流多为对地域的识别,即将同一地域的包裹分拣出来后并统一处理、运输等。但是由于物流包裹数量过多,目前都采用半自动化分拣系统,也就是分拣设备加人工的形式,使用的分拣设备有斜导轮式分拣机、滑块式分拣机、交叉带分拣机、翻板式分拣机、agv机器人等,总体来看智能化设备覆盖率低,自动化程度不高,大部分的分拣中心还都依靠人工分拣,导致分拣效率低、错误率高、人工成本高。
技术实现思路
1、本发明的目的在于提供一种物流分拣系统及分拣方法,用以改善现有技术中智能化设备覆盖率低,自动化程度不高,导致分拣效率低、错误率高、人工成本高的问题。
2、本发明的实施例是这样实现的:
3、第一方面,本技术实施例提供一种物流分拣系统,其包括:
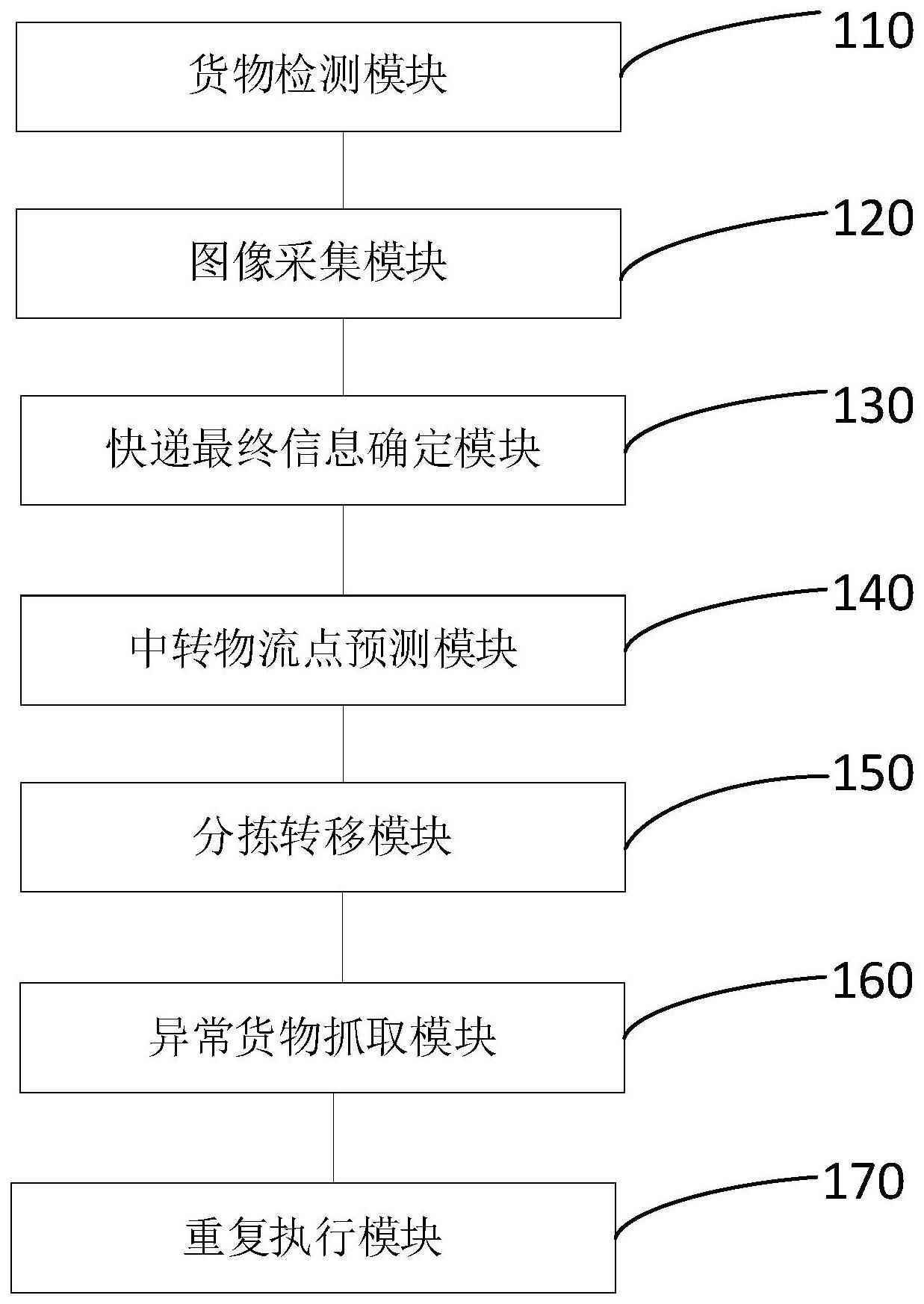
4、货物检测模块,用于实时检测从物流始发点发送至传输带上运输的货物,当检测到传输带上的任一货物时,生成对应的第一图像采集指令,并将第一图像采集指令传输至图像采集模块;
5、图像采集模块接收并根据第一图像采集指令,对货物进行拍摄,得到该货物的第一多角度图像,第一多角度图像包括该货物的快递运单图像;
6、快递最终信息确定模块,用于根据快递运单图像,提取快递运单信息,同时向操作端发送快递信息获取请求,以获取用户通过操作端输入的快递信息,根据快递运单信息和快递信息,确定快递最终信息,其中,快递最终信息包括该货物的始发地信息和终点地信息;
7、中转物流点预测模块,用于根据始发地信息和终点地信息,对该货物的中转物流点进行预测,得到预测中转物流点,同时根据距离该始发地信息最近的预测中转物流点,生成对应的货物分拣指令;
8、分拣转移模块,用于根据货物分拣指令,控制该货物从传输带上转移至对应的分运输带上,同时生成第二图像采集指令;
9、异常货物抓取模块,用于根据第二图像采集指令,采集该货物在分运输带上的第二多角度图像,若第二多角度图像与第一多角度图像一致,则通过该分运输带继续运输,反之,若第二多角度图像与第一多角度图像不一致,则将该货物作为异常货物,根据第二多角度图像,确定货物尺寸数据,并基于货物尺寸数据匹配机械手,同时生成异常货物抓取指令,将异常货物抓取指令发送至该机械手,以控制该机械手将异常货物抓取至上一个物流点,以重新检测该异常货物;
10、重复执行模块,用于重复执行中转物流点预测模块至异常货物抓取模块,直至将该货物运输至对应终点地。
11、在本发明的一些实施例中,上述根据第二多角度图像,确定货物尺寸数据的步骤包括:
12、根据第二多角度图像,确定该异常货物与分运输带的大小差别数据;
13、基于大小差别数据,获取并根据分运输带的尺寸参数,计算得到该异常货物的货物尺寸数据。
14、在本发明的一些实施例中,上述异常货物抓取模块包括:
15、图像比较单元,用于利用图像比较算法将第二多角度图像与第一多角度图像进行比较,得到相似度参数;
16、大于预设阈值单元,用于当相似度参数大于预设阈值时,认为第二多角度图像与第一多角度图像一致;
17、小于预设阈值单元,用于当相似度参数小于预设阈值时,认为第二多角度图像与第一多角度图像不一致。
18、在本发明的一些实施例中,上述快递最终信息确定模块包括:
19、比对单元,用于将快递运单信息和用户输入的快递信息进行比对,若不一致,则确定不一致参数,并将不一致参数发送至操作端,同时发送提醒消息。
20、第二方面,本技术实施例提供一种物流分拣方法,其包括如下步骤:
21、s110:实时检测从物流始发点发送至传输带上运输的货物,当检测到传输带上的任一货物时,生成对应的第一图像采集指令;
22、s120:根据第一图像采集指令,对货物进行拍摄,得到该货物的第一多角度图像,第一多角度图像包括该货物的快递运单图像;
23、s130:根据快递运单图像,提取快递运单信息,同时向操作端发送快递信息获取请求,以获取用户通过操作端输入的快递信息,根据快递运单信息和快递信息,确定快递最终信息,其中,快递最终信息包括该货物的始发地信息和终点地信息;
24、s140:根据始发地信息和终点地信息,对该货物的中转物流点进行预测,得到预测中转物流点,同时根据距离该始发地信息最近的预测中转物流点,生成对应的货物分拣指令;
25、s150:根据货物分拣指令,控制该货物从传输带上转移至对应的分运输带上,同时生成第二图像采集指令;
26、s160:根据第二图像采集指令,采集该货物在分运输带上的第二多角度图像,若第二多角度图像与第一多角度图像一致,则通过该分运输带继续运输,反之,若第二多角度图像与第一多角度图像不一致,则将该货物作为异常货物,根据第二多角度图像,确定货物尺寸数据,并基于货物尺寸数据匹配机械手,同时生成异常货物抓取指令,将异常货物抓取指令发送至该机械手,以控制该机械手将异常货物抓取至上一个物流点,以重新检测该异常货物;
27、s170:重复执行s140至s160,直至将该货物运输至对应终点地。
28、第三方面,本技术实施例提供一种电子设备,其包括存储器,用于存储一个或多个程序;处理器。当一个或多个程序被处理器执行时,实现如上述第二方面的方法。
29、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述第二方面的方法。
30、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
31、本发明提出了一种物流分拣系统及分拣方法,其包括:货物检测模块,用于实时检测从物流始发点发送至传输带上运输的货物,当检测到传输带上的任一货物时,生成对应的第一图像采集指令,并将第一图像采集指令传输至图像采集模块。图像采集模块接收并根据第一图像采集指令,对货物进行拍摄,得到该货物的第一多角度图像,第一多角度图像包括该货物的快递运单图像。快递最终信息确定模块,用于根据快递运单图像,提取快递运单信息,同时向操作端发送快递信息获取请求,以获取用户通过操作端输入的快递信息,根据快递运单信息和快递信息,确定快递最终信息,保证了快递最终信息的准确性,其中,快递最终信息包括该货物的始发地信息和终点地信息。中转物流点预测模块,用于根据始发地信息和终点地信息,对该货物的中转物流点进行预测,得到预测中转物流点,同时根据距离该始发地信息最近的预测中转物流点,生成对应的货物分拣指令,以触发控制该货物从传输带转移至分运输带的动作。分拣转移模块,用于根据货物分拣指令,控制该货物从传输带上转移至对应的分运输带上,同时生成第二图像采集指令,以采集该货物在分运输带上的第二多角度图像。异常货物抓取模块,用于根据第二图像采集指令,采集该货物在分运输带上的第二多角度图像,若第二多角度图像与第一多角度图像一致,则通过该分运输带继续运输,反之,若第二多角度图像与第一多角度图像不一致,则将该货物作为异常货物,根据第二多角度图像,确定货物尺寸数据,并基于货物尺寸数据匹配机械手,同时生成异常货物抓取指令,将异常货物抓取指令发送至该机械手,以控制该机械手将异常货物抓取至上一个物流点,以重新检测该异常货物,从而有效避免了分拣错误的情况。重复执行模块,用于重复执行中转物流点预测模块至异常货物抓取模块,直至将该货物运输至对应终点地。从而对于任一货物而言,一旦出现货物运输错误的情况,直接根据该货物的货物尺寸数据,为该货物匹配对应的机械手,利用该机械手将该货物抓取至上一个物流点,进行重新的分流检测。从而提高了分拣过程中的智能化覆盖率,提高了自动化程度,进而提高了分拣效率,降低分拣错误率,也就有效降低了人工成本。
- 还没有人留言评论。精彩留言会获得点赞!