本发明涉及滚轴筛,具体而言,涉及一种抛物线式防堵滚轴筛控制系统及方法。
背景技术:
1、滚轴筛的工作原理是将物料从进料口投入筛箱内,滚轴开始旋转,物料在滚轴的作用下被带动向前运动。在运动过程中,物料受到筛网的振动作用,较小的颗粒通过筛网落入下方的出料口,较大的颗粒则被滚轴带回到筛箱的另一端,继续进行筛分过程。
2、然而,滚轴筛的筛分效果受物料条件的影响,需要根据具体情况进行调整,因此,本技术提出的一种抛物线式防堵滚轴筛控制系统及方法,主要是为了解决如何根据物料条件提高滚轴筛自动控制能力和筛分效果的问题。
技术实现思路
1、鉴于此,本发明提出了一种抛物线式防堵滚轴筛控制系统及方法,主要是为了解决如何根据物料条件提高滚轴筛自动控制能力和筛分效果的问题。
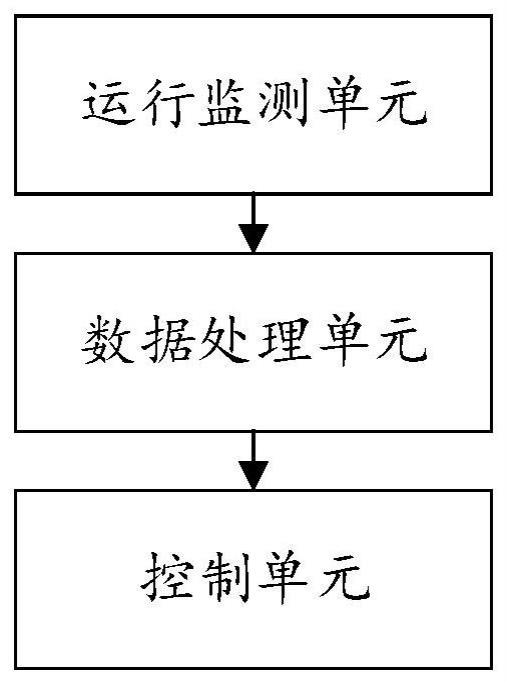
2、一个方面,本发明提出了一种抛物线式防堵滚轴筛控制系统,该系统包括:
3、运行监测单元,用于实时监测防堵滚轴筛的运行数据;
4、数据处理单元,用于获取运行监测单元的运行数据并进行处理,得到最终功率修正系数;
5、控制单元,用于根据最终功率修正系数对防堵滚轴筛的驱动功率;
6、运行监测单元包括:图像识别组件、水分监测组件、转速监测组件和重量监测组件。
7、在本技术的一些实施例中,图像识别组件设置在防堵滚轴筛的筛轴上用于对入料粒径进行图像识别,并获取入料粒径数据;
8、水分监测组件和重量监测组件设置在防堵滚轴筛的入料口用于对入料湿度和入料重量进行监测,并获取入料含水量数据和入料重量数据;
9、转速监测组件设置在防堵滚轴筛的驱动电机上用于对防堵滚轴筛的转速进行监测,并获取转速数据。
10、在本技术的一些实施例中,数据处理单元用于获取运行监测单元的运行数据并进行处理得到功率调整系数时,包括:
11、预先设定初始功率修正系数a,且a=1;
12、获取入料粒径数据b0;
13、有限设定第一预设粒径值b1、第二预设粒径值b2、第三预设粒径值b3、第四预设粒径值b4,且b1>b2>b3>b4;预先设定第一预设调整系数b1、第二预设调整系数b2、第三预设调整系数b3、第四预设调整系数b4,且1.1>b1>b2>1>b3>b4>0.9;
14、当b0≥b1时,选定第一预设调整系数b1对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b1;
15、当b1>b0≥b2时,选定第二预设调整系数b2对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b2;
16、当b2>b0≥b3时,选定第三预设调整系数b3对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b3;
17、当b3>b0≥b4时,选定第四预设调整系数b4对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b4。
18、在本技术的一些实施例中,数据处理单元在选定第i预设调整系数bi对初始功率修正系数a进行一次调整,i=1,2,3,4,得到一次调整后的初始功率修正系数为a*bi后,还包括:
19、获取入料重量数据c0和转速数据d0,计算得出入料重量与转速之比h0,h0=c0/d0;
20、预先设定第一预设比值h1、第二预设比值h2、第三预设比值h3、第四预设比值h4,且h1>h2>h3>h4;预先设定第一预设调整系数h1、第二预设调整系数h2、第三预设调整系数h3、第四预设调整系数h4,且1.1>h1>h2>1>h3>h4>0.9;
21、当h0≥h1时,选定第一预设调整系数h1对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h1;
22、当h1>h0≥h2时,选定第二预设调整系数h2对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h2;
23、当h2>h0≥h3时,选定第三预设调整系数h3对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h3;
24、当h3>h0≥h4时,选定第四预设调整系数h4对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h4。
25、在本技术的一些实施例中,数据处理单元在选定第i预设调整系数hi对一次调整后的初始功率修正系数a*bi进行二次调整,i=1,2,3,4,得到二次调整后的初始功率修正系数为a*bi*hi后,还包括:
26、获取入料含水量数据f0;
27、预先设定第一预设含水量值f1、第二预设含水量值f2、第三预设含水量值f3、第四预设含水量值f4,且f1>f2>f3>f4;预先设定第一预设调整系数f1、第二预设调整系数f2、第三预设调整系数f3、第四预设调整系数f4,且1.1>f1>f2>1>f3>f4>0.9;
28、当f0≥f1时,选定第一预设调整系数f1对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f1;
29、当f1>f0≥f2时,选定第二预设调整系数f2对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f2;
30、当f2>f0≥f3时,选定第三预设调整系数f3对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f3;
31、当f3>f0≥f4时,选定第四预设调整系数f4对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f4;
32、在选定第i预设调整系数fi对二次调整后的初始功率修正系数a*bi*hi进行三次调整,i=1,2,3,4,得到三次调整后的初始功率修正系数为a*bi*hi*fi后,将三次调整后的初始功率修正系数a*bi*hi*fi作为最终功率修正系数ab。
33、另一个方面,本发明提出了一种抛物线式防堵滚轴筛控制方法,该方法包括:实时监测防堵滚轴筛的运行数据;
34、获取运行数据并进行处理,得到最终功率修正系数;
35、根据最终功率修正系数对防堵滚轴筛的驱动功率进行调整;
36、运行数据包括:入料粒径数据、入料含水量、入料重量和转速数据。
37、在本技术的一些实施例中,通过在防堵滚轴筛的筛轴上设置图像识别组件于对入料粒径进行图像识别,并获取入料粒径数据;
38、通过在防堵滚轴筛的入料口设置水分监测组件和重量监测组件对入料湿度和入料重量进行监测,并获取入料含水量数据和入料重量数据;
39、通过在防堵滚轴筛的驱动电机上设置转速监测组件用于对防堵滚轴筛的转速进行监测,并获取转速数据。
40、在本技术的一些实施例中,在获取运行数据并进行处理,得到最终功率修正系数时,包括:
41、预先设定初始功率修正系数a,且a=1;
42、获取入料粒径数据b0;
43、有限设定第一预设粒径值b1、第二预设粒径值b2、第三预设粒径值b3、第四预设粒径值b4,且b1>b2>b3>b4;预先设定第一预设调整系数b1、第二预设调整系数b2、第三预设调整系数b3、第四预设调整系数b4,且1.1>b1>b2>1>b3>b4>0.9;
44、当b0≥b1时,选定第一预设调整系数b1对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b1;
45、当b1>b0≥b2时,选定第二预设调整系数b2对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b2;
46、当b2>b0≥b3时,选定第三预设调整系数b3对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b3;
47、当b3>b0≥b4时,选定第四预设调整系数b4对初始功率修正系数a进行一次调整,一次调整后的初始功率修正系数为a*b4。
48、在本技术的一些实施例中,在选定第i预设调整系数bi对初始功率修正系数a进行一次调整,i=1,2,3,4,得到一次调整后的初始功率修正系数为a*bi后,还包括:
49、获取入料重量数据c0和转速数据d0,计算得出入料重量与转速之比h0,h0=c0/d0;
50、预先设定第一预设比值h1、第二预设比值h2、第三预设比值h3、第四预设比值h4,且h1>h2>h3>h4;预先设定第一预设调整系数h1、第二预设调整系数h2、第三预设调整系数h3、第四预设调整系数h4,且1.1>h1>h2>1>h3>h4>0.9;
51、当h0≥h1时,选定第一预设调整系数h1对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h1;
52、当h1>h0≥h2时,选定第二预设调整系数h2对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h2;
53、当h2>h0≥h3时,选定第三预设调整系数h3对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h3;
54、当h3>h0≥h4时,选定第四预设调整系数h4对一次调整后的初始功率修正系数a*bi进行二次调整,二次调整后的初始功率修正系数为a*bi*h4。
55、在本技术的一些实施例中,在选定第i预设调整系数hi对一次调整后的初始功率修正系数a*bi进行二次调整,i=1,2,3,4,得到二次调整后的初始功率修正系数为a*bi*hi后,还包括:
56、获取入料含水量数据f0;
57、预先设定第一预设含水量值f1、第二预设含水量值f2、第三预设含水量值f3、第四预设含水量值f4,且f1>f2>f3>f4;预先设定第一预设调整系数f1、第二预设调整系数f2、第三预设调整系数f3、第四预设调整系数f4,且1.1>f1>f2>1>f3>f4>0.9;
58、当f0≥f1时,选定第一预设调整系数f1对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f1;
59、当f1>f0≥f2时,选定第二预设调整系数f2对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f2;
60、当f2>f0≥f3时,选定第三预设调整系数f3对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f3;
61、当f3>f0≥f4时,选定第四预设调整系数f4对二次调整后的初始功率修正系数a*bi*hi进行三次调整,三次调整后的初始功率修正系数为a*bi*hi*f4;
62、在选定第i预设调整系数fi对二次调整后的初始功率修正系数a*bi*hi进行三次调整,i=1,2,3,4,得到三次调整后的初始功率修正系数为a*bi*hi*fi后,将三次调整后的初始功率修正系数a*bi*hi*fi作为最终功率修正系数ab。
63、与现有技术相比,本发明存在以下有益效果:本发明首先通过实时监测防堵滚轴筛的运行数据,其中运行数据包括:防堵滚轴筛入料的入料粒径、入料含水量、入料重量和转速,通过对防堵滚轴筛的入料的条件进行整体监测和分析,选定对应的调整系数对防堵滚轴筛的驱动电机的驱动功率进行调整,进而实现根据入料信息对防堵滚轴筛的自动控制,提高防堵滚轴筛的筛分效率,同时降低工作人员的工作量,减少人力成本,提高自动化程度。