货物分拣方法、分拣机和分拣系统与流程
本技术涉及仓储物流,尤其是涉及一种货物分拣方法、分拣机和分拣系统。
背景技术:
1、在仓储系统中,立体分拣机与分拣机器人之间通过相互协作可以完成对货物的分拣。通常,分拣机器人(或者分拣人员)可以在分拣机的投递侧将货物投递至分拣机的投递机构上,再由投递机构将货物投递至位于分拣机两侧的周转料箱,以完成对货物的分拣。
2、通常,分拣机器人在与分拣机之间协同工作时,会存在相互等待的问题。例如,分拣机器人需要等待投递机构复位并就绪后才能进行下一次的投递,增加了分拣机器人货物投递的时间,降低了货物分拣效率。
技术实现思路
1、为了解决上述问题,本技术实施例提供了一种货物分拣方法、分拣机和分拣系统。具体地,本技术实施例公开了以下技术方案:
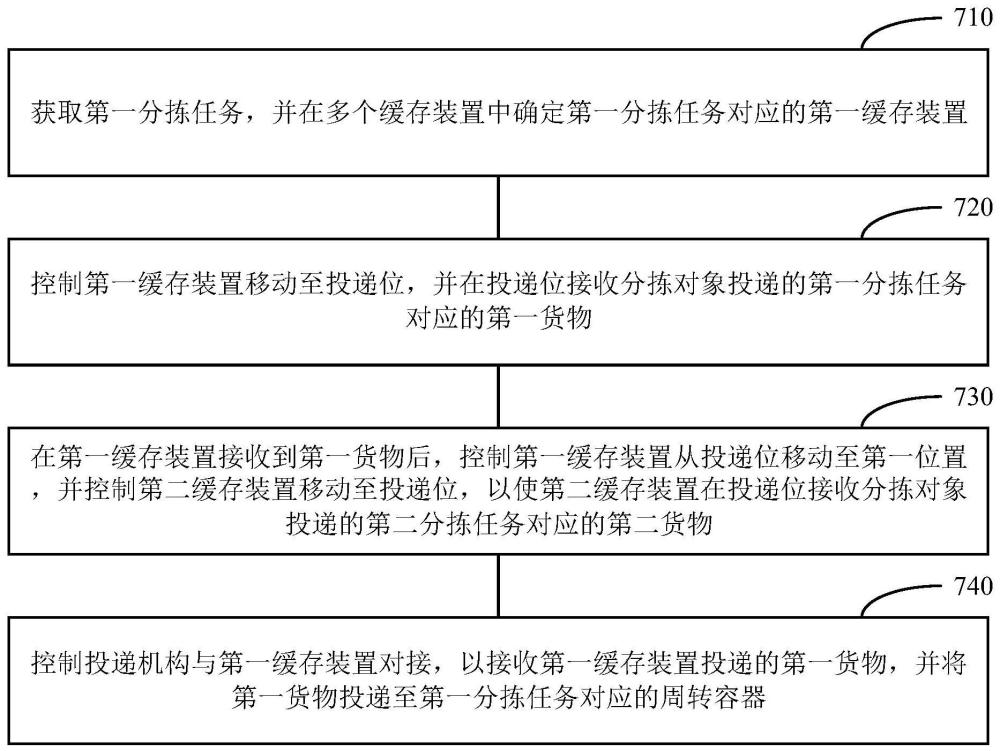
2、本技术实施例第一方面提供一种货物分拣方法,该方法应用于分拣系统;分拣系统包括缓存机构和投递机构;缓存机构包括多个缓存装置,多个缓存装置中的各缓存装置用于缓存分拣对象投递的货物。该货物分拣方法包括:获取第一分拣任务,并在多个缓存装置中确定第一分拣任务对应的第一缓存装置。控制第一缓存装置移动至投递位,并在投递位接收分拣对象投递的第一分拣任务对应的第一货物。在第一缓存装置接收到第一货物后,控制第一缓存装置从投递位移动至第一位置,并控制第二缓存装置移动至投递位,以使第二缓存装置在投递位接收分拣对象投递的第二分拣任务对应的第二货物;其中,第二缓存装置为第二分拣任务对应的缓存装置,第二缓存装置与第一缓存装置不同。控制投递机构与第一缓存装置对接,以接收第一缓存装置投递的第一货物,并将第一货物投递至第一分拣任务对应的周转容器。
3、在一些实施例中,控制投递机构与第一缓存装置对接,以接收第一缓存装置投递的第一货物,包括:根据第一缓存装置的当前位置,控制投递机构移动至当前位置对应的目标停靠位,并在目标停靠位接收第一缓存装置投递的第一货物;其中,当前位置包括第一位置。
4、在一些实施例中,在多个缓存装置中确定第一分拣任务对应的第一缓存装置,包括:获取各缓存装置的状态信息;其中,状态信息用于指示缓存装置上放置有货物或未放置有货物。根据各缓存装置的状态信息,在多个缓存装置中确定第一分拣任务对应的第一缓存装置。
5、在一些实施例中,根据各缓存装置的状态信息,在多个缓存装置中确定第一分拣任务对应的第一缓存装置,包括:根据各缓存装置的状态信息,若确定多个缓存装置存在一个未放置有货物的缓存装置,则将未放置有货物的缓存装置确定为第一缓存装置;若确定多个缓存装置存在至少两个未放置有货物的缓存装置,则在至少两个未放置有货物的缓存装置中确定第一缓存装置。
6、在一些实施例中,在至少两个未放置有货物的缓存装置中确定第一缓存装置,包括:在至少两个未放置有货物的缓存装置中,随机将未放置有货物的一个缓存装置确定为第一缓存装置;或者,根据至少两个未放置有货物的缓存装置的优先级信息,在至少两个未放置有货物的缓存装置中确定第一缓存装置。
7、在一些实施例中,在初始时刻,多个缓存装置中任意两个相邻的缓存装置之间的间距为初始间距。在第一缓存装置移动过程中,任意两个相邻的缓存装置之间的间距保持初始间距不变;或者,在第一缓存装置移动过程中,至少两个相邻的缓存装置之间的间距发生变化。
8、在一些实施例中,控制第一缓存装置移动至投递位,包括:根据第一分拣任务,确定第一货物的尺寸;若多个缓存装置中存在位于第一缓存装置相邻上方的第三缓存装置,且第一货物的尺寸大于第三缓存装置与第一缓存装置之间的初始间距,则控制第三缓存装置移动至第二位置,以使第三缓存装置与第一缓存装置之间的第一间距大于第一货物的尺寸。控制第一缓存装置和第三缓存装置同时移动,以将第一缓存装置移动至投递位;其中,在第一缓存装置和第三缓存装置移动的过程中,第三缓存装置与第一缓存装置之间的第一间距保持不变。
9、在一些实施例中,控制第一缓存装置移动至投递位,包括:根据第一分拣任务,确定第一货物的尺寸;若多个缓存装置中存在位于第一缓存装置相邻上方的第三缓存装置,且第一货物的尺寸大于第三缓存装置与第一缓存装置之间的初始间距,则控制第一缓存装置移动至投递位,并控制第三缓存装置移动至第三位置,以使第三缓存装置与第一缓存装置之间的第二间距大于第一货物的尺寸;其中,在第一缓存装置和第三缓存装置移动的过程中,第三缓存装置与第一缓存装置之间的间距由初始间距变化为第二间距。
10、在一些实施例中,根据第一缓存装置的当前位置,控制投递机构移动至当前位置对应的目标停靠位,包括:根据当前位置和预设对应关系,确定当前位置对应的目标停靠位;其中,预设对应关系包括多个位置,以及各位置对应的预设停靠位。控制投递机构移动至目标停靠位。
11、在一些实施例中,根据当前位置和预设对应关系,确定当前位置对应的目标停靠位,包括:在多个位置包括当前位置的情况下,根据预设对应关系,将当前位置对应的预设停靠位确定为目标停靠位;在多个位置不包括当前位置的情况下,根据当前位置,计算当前位置对应的目标停靠位。
12、在一些实施例中,多个缓存装置包括三个缓存装置,预设停靠位包括五个停靠位。
13、在一些实施例中,该货物分拣方法还包括:在第一缓存装置移动至投递位时,向分拣系统发送就绪指令,以使分拣系统基于就绪指令,向分拣对象发送投递指令;其中,投递指令用于指示分拣对象将第一货物投递至第一缓存装置。
14、本技术实施例第二方面提供一种分拣机,该分拣机包括缓存机构和投递机构;缓存机构包括多个缓存装置,多个缓存装置中的各缓存装置被配置为缓存分拣对象投递的货物;多个缓存装置包括第一缓存装置和第二缓存装置,第一缓存装置是第一分拣任务对应的缓存装置,第二缓存装置是第二分拣任务对应的缓存装置。第一缓存装置,被配置为移动至投递位,在投递位接收分拣对象投递的第一分拣任务对应的第一货物;并在接收到第一货物后,移动至第一位置。第二缓存装置,被配置为在第一缓存装置接收到第一货物后,移动至投递位,以在投递位接收分拣对象投递的第二分拣任务对应的第二货物。投递机构,被配置为与第一缓存装置对接,以接收第一缓存装置投递的第一货物,并将第一货物投递至第一分拣任务对应的周转容器。
15、本技术第三方面提供一种分拣系统,该分拣系统包括分拣机、分拣机器人和控制装置。分拣机包括缓存机构和投递机构;缓存机构包括多个缓存装置;多个缓存装置中的各缓存装置被配置为缓存分拣机器人投递的货物。控制装置被配置为向分拣机发送第一分拣任务和第二分拣任务。分拣机被配置为获取第一分拣任务和第二分拣任务,根据第一分拣任务和第二分拣任务,在多个缓存装置中分别为第一分拣任务确定第一缓存装置,为第二分拣任务确定第二缓存装置;控制第一缓存装置移动至投递位,以在投递位接收分拣机器人投递的第一分拣任务对应的第一货物;并在第一缓存装置移动至投递位时,向控制装置发送就绪指令。控制装置,被配置为根据就绪指令,向分拣机器人发送投递指令。分拣机器人被配置为:获取投递指令,并根据投递指令,将第一货物投递至多个缓存装置中的第一缓存装置上。分拣机被配置为:在第一缓存装置接收到第一货物后,控制第一缓存装置从投递位移动至第一位置;控制第二缓存装置移动至投递位,以使第二缓存装置在投递位接收分拣机器人投递的第二分拣任务对应的第二货物;控制投递机构与第一缓存装置对接,以接收第一缓存装置投递的第一货物,并将第一货物投递至第一分拣任务对应的周转容器。
16、本技术实施例第四方面提供了一种电子设备,包括:处理器和存储器,所述存储器,用于存储计算机可执行指令;所述处理器,用于从所述存储器中读取所述指令,并执行所述指令以实现前述第一方面所述的货物分拣方法。
17、本技术实施例第五方面提供了一种计算机可读存储介质,该存储介质存储有计算机程序指令,当计算机读取所述指令时,执行前述第一方面所述的货物分拣方法。
18、本技术实施例第六方面提供了一种计算机程序产品,该计算机程序产品包括存储在非暂态计算机可读存储介质上的计算程序,该计算机程序包括程序指令,当该程序指令被计算机执行时,使该计算机执行前述第一方面所述的货物分拣方法。
19、本技术实施例提供的货物分拣方法、分拣机和分拣系统,通过在分拣机中增加缓存机构,该缓存机构包括多个缓存装置,各缓存装置可以接收并缓存分拣对象所投递的货物,并将货物投递给投递机构。将第一缓存装置移动至投递位接收分拣对象投递的第一货物,并在接收到第一货物后,将第一缓存装置移动至当前位置以向投递机构进行第一货物的投递;在第一缓存装置离开了投递位的同时,可以将第二缓存装置移动至投递位,以使第二缓存装置可以在投递位继续接收分拣对象的下一次投递。因此,本技术实施例提供的货物分拣方法可以保证分拣机的投递位能够持续存在接收分拣对象投递的缓存装置,从而可以避免分拣机器人到达投递位需要等待投递机构复位后才能进行投递的问题,减少了分拣机器人的等待时间,提高了货物分拣效率。
- 还没有人留言评论。精彩留言会获得点赞!