一种伯努利水流多级式发电系统的制作方法
1.本发明涉及一种发电系统,尤其是利用水流冲力产生动力的发电系统。
背景技术:
2.目前利用水力发电主要是修坝式电站,其修坝的目的主要是形成高水头高落差,即高势能发电,其发电效率固然也很高,但带来缺点也很明显,其一、修坝后水位高涨,直接导致地质结构、生态、农田、文化古迹等的损失及变化,甚至移民,造成的是不可恢复的影响,其二、修建水坝成本较高,其三、落差大导致噪音大,影响周边居民及电站工作人员,其四、发电站选址有考究,不是随意在任何地方均可建电站,缺发灵活性,不够轻便,不可随意移动,现在国外虽也开始无坝式发电的兴起,但总体由于落差较小,发电水轮机转速不够等缺点很难普级运用。
技术实现要素:
3.本发明的目的在于克服上述现有技术的不足,充分利用水流直接冲击扇叶运转,由于扇叶与河面几乎等宽,极大地利用河截面巨大冲量能量的同时利用伯努利原理增加水流速使水轮机转速提高再经变速后进行发电,因此提供一种伯努利水流多级式发电系统,包括漂浮船体,其特征是漂浮船体内部呈开口前后贯通状,漂浮船体内部水流空间分布有翼剖面结构状,水轮机置于水流空间最窄位置,水流经过漂浮船体内部流过且冲击水轮机叶片,使水轮机带动发电机工作发电。
4.具体地,所述的水位感应器感知水位高低,感知信号传输给电子控制电路,电子控制电路控制水泵工作,可使储水罐中的水量增减,从而控制漂浮船体没入水中深度,使水流精准从漂浮船体的入水口流入。
5.具体地,所述的翼剖面结构状呈多级前后排列分布。
6.具体地,所述的翼剖面结构与水轮机同侧。
7.具体地,所述的翼剖面结构存于漂浮船体内底部。
8.具体地,所述的水流从漂浮船体入水口流入后,水流遇到翼剖面结构状,水流通道变窄,水流速加快,从而使水轮机转速加快,发电机功率得到提高。
9.具体地,所述的水位感应器固定于漂浮船体上,水位感应器与电子控制电路存在电性连接,电子控制电路和水泵存在电性连接。
10.具体地,所述的储水罐通过管道与水泵进行连接。
11.具体地,所述的漂浮船体没入水中深度由储水罐中储水量进行控制。
12.当把以上结构的一种伯努利水流多级式发电系统置于等宽的河流中时,或者多个此结构的发电系统组合后置于等宽的河流中,水位感应器感知到水位高度后,将这一信号传输给电子控制电路,电子控制电路再控制水泵给储水罐加水或减少水量,从而控制漂浮船体没入水中深度,使水流精准从漂浮船体的入水口流入,水流从漂浮船体入水口流入后,水流遇到翼剖面结构状,此时的翼剖面结构状可排列成多极式,根据流体力学的伯努利原
理,水流通道变窄,水流速加快,从而使水轮机转速加快,发电机功率得到提高,而在实际运用中,飘浮深度控制装置自动使漂浮船体上下浮动,以更好的适应水流对水轮机扇叶的最大冲击速度与力量,飘浮深度控制、转速、工作状态监测及控制也可由电脑程序来完成,使之更加自动化。
13.此方案灵活且方便移动、便于安装维护、成本低廉、不需破坏自然环境为代价,彻底解决修水坝式电站的不足,特别适合有河流附近的村庄小镇就近安装使用,无需大量拉网并线,适用性更强更易于普及。
附图说明
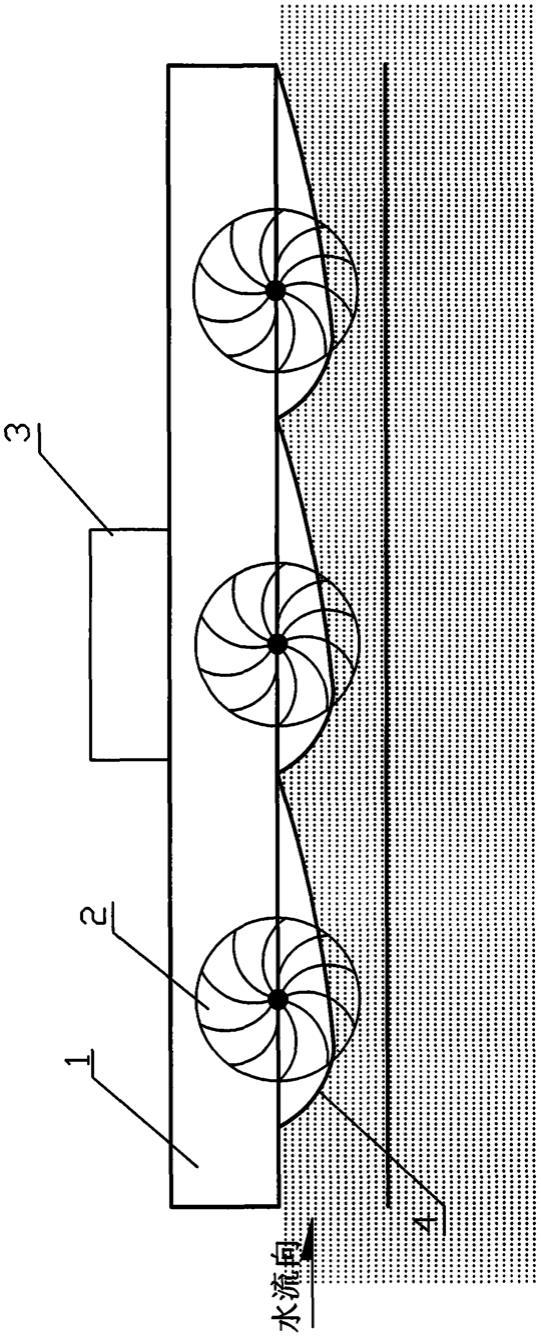
14.图1是本发明提供的一种伯努利水流多级式发电系统没入河水中剖视图。
15.图2是本发明提供的一种伯努利水流多级式发电系统中水轮机与发电机连接部分剖视图。
16.图3是本发明提供的一种伯努利水流多级式发电系统的漂浮船体剖视图。
17.图4是本发明提供的一种伯努利水流多级式发电系统的入水口部分也即是左视图。
18.图5是本发明提供的一种伯努利水流多级式发电系统翼剖面结构存于漂浮船体内底部剖视图。
具体实施方式
19.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
20.实施例一
21.如图1、图2和图3所示,本发电系统主要包括漂浮船体1,漂浮船体1内部呈开口前后贯通状,漂浮船体1内部水流空间分布有翼剖面结构状4,水轮机2置于水流空间最窄位置,水流经过漂浮船体1内部流过且冲击水轮机2叶片,使水轮机2带动发电机5工作发电。
22.如图4所示,水位感应器6感知水位高低,感知信号传输给电子控制电路7,电子控制电路7控制水泵8工作,可使储水罐3中的水量增减,从而控制漂浮船体1没入水中深度,使水流精准从漂浮船体1的入水口流入。
23.如图4所示,翼剖面结构状4呈多级前后排列分布。
24.如图1所示,所述的翼剖面结构状4与水轮机2同侧。
25.如图5所示,翼剖面结构4存于漂浮船体1内底部。无论翼剖面结构4在漂浮船体1内底部或水轮机2同侧,其目的都是为了达到伯努利原理的流体力学效果。
26.如图1、图2图5所示,水流从漂浮船体1入水口流入后,水流遇到翼剖面结构状4,水流通道变窄,水流速加快,从而使水轮机2转速加快,发电机5功率得到提高。
27.如图4所示,水位感应器6固定于漂浮船体1上,水位感应器6与电子控制电路7存在电性连接,电子控制电路7和水泵8存在电性连接。
28.如图2、图4所示,储水罐3通过管道9与水泵8进行连接。水轮机2通过变速机构10与发电机5相连。
29.如图1所示,漂浮船体1没入水中深度由储水罐3中储水量进行控制。
30.如图1、图4和图5所示,当把以上结构的一种伯努利水流多级式发电系统置于等宽的河流中时,或者多个此结构的发电系统组合后置于等宽的河流中,水位感应器6感知到水位高度后,将这一信号传输给电子控制电路7,电子控制电路7再控制水泵8给储水罐3加水或减少水量,从而控制漂浮船体1没入水中深度,使水流精准从漂浮船体1的入水口流入,水流从漂浮船体1入水口流入后,水流遇到翼剖面结构状4,此时的翼剖面结构状4可排列成多极式,根据流体力学的伯努利原理,水流通道变窄,水流速加快,从而使水轮机2转速加快,发电机5功率得到提高,而在实际运用中,飘浮深度控制装置自动使漂浮船体1上下浮动,以更好的适应水流对水轮机2扇叶的最大冲击速度与力量,飘浮深度控制、转速、工作状态监测及控制也可由电脑程序来完成,使之更加自动化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1