深海半潜式风电机组对风获能及稳定性协同控制方法及系统与流程
[0001]
本发明涉及海上风电机组发电领域,特别涉及一种针对深海半潜式风电机组对风获能及稳定性协同控制方法及系统。
背景技术:
[0002]
相比于海上桩式风电机组,漂浮式机组可以在更深水域区间安装,对海上风力资源的利用力度更大。早在1972年,美国麻省理工学院的william heronemus教授就提出了这一设想。当前,随着风电产业的不断扩展,陆上可供开发的风电场日益减少,风电向海上发展成为必然。考虑近海渔业、军事等实际条件限制,深海漂浮式风电机组的开发和研究具有广阔前景,已成为当前风电产业的焦点之一。经过近些年来的探索,已经提出多种海上风电机组结构形式,典型的结构形式主要有spar式、tlp式和半潜式(三浮筒式)。半潜式结构简单,平衡稳定性较好,拖航和安装简单方便。
[0003]
在风速和风向变化时,漂浮式平台受力状态会随之变化,若突破动态平衡的临界条件,则可能发生倾覆倒塌,需要通过平台内部水位循环调节(即通过压舱水的重新分配来调整漂浮式平台质量分布)来保证系统平稳。在风向变化角度较大时,需要启动风电机组偏航机构,转动机舱对风。偏航运行过程中气动载荷发生变化,并且变化的气动载荷经过风轮、传动系统、机舱、偏航大齿圈、塔架会传递至漂浮式平台,影响平台受力、弯矩、扭矩的平衡,最终影响整机稳定性。而且,海上漂浮式风电机组同时受到风浪流的联合作用,在多重时变载荷的作用下,需要有效的动态平衡调节策略才能保持整体受力动态平衡,使得风电机组能够最大程度的捕获风能。
[0004]
因此本发明提出一种深海半潜式风电机组对风获能及稳定性协同控制方法及系统,对海上风力风电的发展有积极的意义。
技术实现要素:
[0005]
为了解决上述的技术问题,本发明设计了一种结构合理、具有自适应性的深海半潜式风电机组对风获能及稳定性协同控制方法及系统。
[0006]
本发明专利所采用的技术方案是:
[0007]
深海半潜式风电机组对风获能及稳定性协同控制系统,包括传感检测装置、数据处理及控制装置、偏航装置、漂浮式平台稳定调节装置和显示装置;所述传感检测装置采集检测信号并传输给所述数据处理及控制装置;所述数据处理及控制装置处理分析所述传感检测装置传输的检测信号数据后,将处理结果传输给显示装置,并控制偏航装置转动机舱对风,同时控制漂浮式平台稳定调节装置调节漂浮式平台的平衡,以达到最佳偏航对风效果,尽可能的捕获风能;所述显示装置接收所述数据处理及控制装置所传输的数据信号,进行显示。
[0008]
上述传感检测装置包括安装在机舱尾部的风速风向传感器和安装在漂浮式平台上的姿态传感器。
[0009]
上述数据处理及控制装置选用stm32f103rct6嵌入式
-ꢀ
微控制器作为整个系统的中央处理模块。
[0010]
所述偏航装置包括偏航执行机构、偏航轴承、制动盘和液压制动器。偏航执行机构共四组,每组偏航执行机构包括驱动电机、行星齿轮减速器、驱动小齿轮。
[0011]
进一步地,上述漂浮式平台稳定调节装置含有安装在漂浮式平台三个浮筒内部的三台水泵。
[0012]
进一步地,风速风向传感器采用cff3d-1型三维超声波风速风向传感器,用以检测风速风向信号;姿态传感器采用 mpu60509轴运动处理传感器,检测漂浮式平台姿态信号。
[0013]
进一步地,所述偏航驱动电机的输出轴与行星齿轮减速器连接,行星齿轮减速器为四级减速驱动。所述行星齿轮减速器的输出轴与驱动小齿轮连接;每组偏航执行机构的驱动小齿轮与偏航轴承的内圈相啮合,行星齿轮减速器用螺栓固定在机舱底板上。机舱用螺栓固定在偏航轴承外圈上。所述偏航轴承的内圈用螺栓固定在塔架顶端。制动盘与塔架顶端固定在一起,液压制动器通过螺栓与机舱底部固定在一起。
[0014]
所述数据处理及控制装置通过控制所述漂浮式平台稳定调节装置中水泵的启停,重新调节分配漂浮式平台浮筒内的压舱水水量,改变漂浮式平台的重心位置,使漂浮式平台保持平衡。浮筒间压舱水的调节输送方式采取单向循环输送,即ⅰ号水泵从ⅰ号浮筒内向ⅱ号浮筒内抽送压舱水,ⅱ号水泵从ⅱ号浮筒内向ⅲ号浮筒内抽送压舱水,ⅲ号水泵从ⅲ号浮筒内向ⅰ号浮筒内抽送压舱水。
[0015]
深海半潜式风电机组对风获能及稳定性协同控制方法,包括如下步骤:
[0016]
(1)传感检测装置对信号的采集和传输;
[0017]
传感检测装置所需采集的信号为风速风向信号和半潜式风电机组漂浮式平台的姿态信号,分别利用超声波风速风向传感器和9轴运动处理传感器实现测量,并将采集到的信号传输到数据处理及控制装置。超声波风速风向传感器采集到的风速风向信号为数字量信号,9轴运动处理传感器自带a/d 转换器,可将采集到的漂浮式平台姿态模拟量信号转换为数字量信号,检测信号都能够直接传输给数据处理及控制装置。
[0018]
(2)数据处理及控制装置对信号的分析和处理;
[0019]
所述数据处理及控制装置接收到所述传感检测装置的检测信号,对其进行分析处理,根据风速风向信号判别是否需要控制偏航装置转动机舱对风,同时根据漂浮式平台姿态信号判别是否需要控制漂浮式平台稳定调节装置调节漂浮式平台的平衡,通过协同控制偏航装置和漂浮式平台稳定调节装置,使风电机组达到最佳偏航对风效果,捕获尽可能多的风能。具体步骤如下:
[0020]
a)根据风速风向传感器检测到的风速风向信号,判别风电机组是否需要偏航对风。当风向与机舱位置夹角,即偏航角α大于临界值15
°
时,数据处理及控制装置控制液压制动器松开制动盘,并控制启动4个偏航驱动电机,偏航驱动电机驱动行星齿轮减速器运转,行星齿轮减速器带动驱动小齿轮运转,驱动小齿轮驱动偏航轴承运转,使机舱相对塔架转动对风。当机舱快要对准风向时,数据处理及控制装置停止启动偏航驱动电机,机舱在惯性作用下运动。同时,液压制动器夹紧制动盘,停止偏航。
[0021]
b)当数据处理及控制装置控制偏航装置转动机舱对风时,风轮所受气动载荷发生变化,变化的气动载荷经过风轮、机舱、塔架会传递至漂浮式平台,打破漂浮式平台受力、弯
矩、扭矩的平衡,使漂浮式平台发生平动和旋转。当漂浮式平台发生旋转,其俯仰角或者横滚角大于漂浮式平台稳定调节装置启动的设定角度β时,数据处理及控制装置控制漂浮式平台稳定调节装置调节漂浮式平台的平衡:
[0022]
首先定义惯性坐标系a和体坐标系b,以姿态传感器的检测原点和检测轴为坐标系原点和坐标轴建立体坐标系b,其原点对应于ⅱ号浮筒上端盖中心点,x轴指向ⅲ号浮筒上端盖中心点,z轴垂直向上,y轴与x轴和z轴相交,并且满足右手法则。惯性坐标系a和体坐标b具有相同姿态和位置,其中惯性坐标系a永远固定不变,体坐标系b会随着漂浮式平台的运动而变化。
[0023]
漂浮式平台为等边三角形结构,设每两个浮筒中心距为 l,则三个浮筒端盖中心点相对于体坐标系b的位置矢量分别为:
[0024][0025]
b
p2=[0 0 0 1]
t
ꢀꢀ
(2)
[0026]
b
p3=[0 l 0 1]
t
ꢀꢀ
(3)
[0027]
公式(1)-(3)中的t表示矩阵的转置。
[0028]
当风向变化较大,风电机组偏航对风时,漂浮式平台受力状态会随之变化,整体力平衡条件会被破坏,进而产生平移和旋转,体坐标系b随之变化,根据姿态传感器检测到漂浮式平台的姿态信号,计算出体坐标系b相对于全局坐标系a 的位姿:
[0029]
假设姿态传感器检测到漂浮式平台的姿态信号为ψ、θ和即体坐标系b相对于全局坐标系a的旋转变化为:绕x
a
轴旋转ψ角(俯仰角),绕y
a
轴旋转θ角(横滚角),绕z
a
轴旋转角(航向角),另假设体坐标系b相对于全局坐标系a 的平移变化为:沿x
a
轴平移a个单位,沿y
a
轴平移b个单位,沿z
a
轴平移c个单位。
[0030]
当体坐标系b绕全局坐标系a的x
a
轴旋转ψ角时,其旋转矩阵为:
[0031][0032]
当体坐标系b绕全局坐标系a的y
a
轴旋转θ角时,其旋转矩阵为:
[0033][0034]
当体坐标系b绕全局坐标系a的z
a
轴旋转角时,其旋转矩阵为:
[0035]
[0036]
当体坐标系b沿全局坐标系a的x
a
轴平移a个单位,沿y
a
轴平移b个单位,沿z
a
轴平移c个单位,其变换矩阵为:
[0037][0038]
则体坐标系b相对于全局坐标系a的位姿描述为:
[0039][0040]
根据三个浮筒端盖中心点相对于体坐标系b的位置矢量和体坐标系b相对于全局坐标系a的位姿描述,计算出三个浮筒端盖中心点相对于全局坐标系a的位置矢量:
[0041][0042]
式中,i=1,2,3.
[0043]
联立式(1)-(9),得:
[0044][0045]
[0046][0047]
当横滚角ψ或者俯仰角θ大于漂浮式平台稳定调节装置启动的设定角度β时,数据处理及控制装置控制漂浮式平台稳定调节装置调节漂浮式平台的平衡:
[0048]
由式(10)-(12)可知,漂浮式平台发生倾斜和位移时三个浮筒端盖中心点相对于全局坐标系{a}的z
a
轴坐标值分别为:
[0049][0050]
z
a2
=c
ꢀꢀ
(14)
[0051]
z
a3
=-sinθl+c
ꢀꢀ
(15)
[0052]
比较z
a1
、z
a2
和z
a3
大小,得到z
max
和z
min
,判别出漂浮式平台三个浮筒中位置最高桶和最低桶,控制相应水泵由最低筒向最高筒内输送压舱水,重新调节分配浮筒内压舱水水量,改变漂浮式平台重心位置,缩小浮筒间高度差,直至ψ≤β且θ≤β,漂浮式平台达到平衡控制的目的。
[0053]
(3)测量信号的显示与远程传输
[0054]
显示装置是利用液晶显示屏与数据处理及控制装置之间的数据传输,将数据处理及控制装置处理后得到的数字信号输出至液晶显示屏上,从而得到风速风向信号和半潜式风电机组漂浮式平台的姿态信号。当控制系统安装在海上风电场使用时,其数据则通过rs485传输至上位机。
[0055]
与现有技术相比,本发明具有以下收益效果:
[0056]
(1)结构合理,具有自适应性,本发明能够通过风速风向传感器和姿态传感器实时检测风速风向信号和半潜式风电机组漂浮式平台姿态信号。
[0057]
(2)本发明可以协调控制偏航装置和漂浮式平台稳定调节装置,使半潜式风力发电机组在复杂的海上工作环境下偏航时,能够保持平稳,且达到最佳偏航对风效果,捕获尽可能的风能,无需人为干预和操作,实现自动控制。
附图说明
[0058]
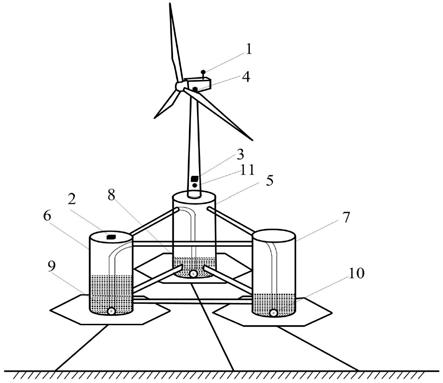
图1是本发明的控制系统结构示意图。
[0059]
图2是本发明的偏航装置结构示意图。
[0060]
图3是本发明的漂浮式平台坐标分析图。
[0061]
图4是本发明的数据处理及控制装置结构图。
[0062]
图5是本发明的控制结构图。
[0063]
图6是本发明的控制方法流程图。
[0064]
1—风速风向传感器 2—姿态传感器3—数据处理及控制装置
[0065]
4—偏航装置 5—ⅰ号浮筒 6—ⅱ号浮筒
[0066]
7—ⅲ号浮筒 8—ⅰ号水泵 9—ⅱ号水泵
[0067]
10—ⅲ号水泵 11—显示装置 12—偏航驱动电机
[0068]
13—行星齿轮减速器 14—驱动小齿轮 15—塔架
[0069]
16—偏航轴承外圈 17—偏航轴承内圈 18—制动盘
[0070]
19—液压制动器
具体实施方式
[0071]
下面结合附图对本发明做进一步说明。
[0072]
如图1~图6所示,本发明的具体结构为:深海半潜式风电机组对风获能及稳定性协同控制系统,它包括传感检测装置,数据处理及控制装置,偏航装置,漂浮式平台稳定调节装置和显示装置;所述传感检测装置采集检测信号并传输给所述数据处理及控制装置;所述数据处理及控制装置处理分析所述传感检测装置传输的检测信号数据后,将处理结果传输给显示装置,并控制偏航装置转动机舱对风,同时控制漂浮式平台稳定调节装置调节漂浮式平台的平衡,以达到最佳偏航对风效果,尽可能的捕获风能;所述显示装置接收所述数据处理及控制装置所传输的数据信号,进行显示。
[0073]
如图1所示,所述传感检测装置包括安装在机舱尾部的风速风向传感器1和安装在漂浮式平台上的姿态传感器2。所述数据处理及控制装置3和显示装置11安装在半潜式风电机组塔架内。所述漂浮式平台稳定调节装置含有安装在ⅰ号浮筒5内的ⅰ号水泵8、ⅱ号浮筒6内的ⅱ号水泵9和ⅲ号浮筒内的ⅲ号水泵10。
[0074]
如图2所示,所述偏航装置包括偏航执行机构、偏航轴承17、制动盘18和液压制动器19。偏航执行机构共四组,每组偏航执行机构包括驱动电机12、行星齿轮减速器13、驱动小齿轮14。
[0075]
所述偏航驱动电机12的输出轴与行星齿轮减速器13连接,行星齿轮减速器13为四级减速驱动。所述行星齿轮减速器13的输出轴与驱动小齿轮14连接;每组偏航执行机构的驱动小齿轮14与偏航轴承17的内圈相啮合,行星齿轮减速器13用螺栓固定在机舱底板上。机舱用螺栓固定在偏航轴承外圈16上。所述偏航轴承17的内圈用螺栓固定在塔架15顶端。制动盘18与塔架15顶端固定在一起,液压制动器19通过螺栓与机舱底部固定在一起。
[0076]
如图3所示,所述数据处理及控制装置3通过控制所述漂浮式平台稳定调节装置中水泵的启停,重新调节分配漂浮式平台浮筒内的压舱水水量,改变漂浮式平台的重心位置,使漂浮式平台保持平衡。浮筒间压舱水的调节输送方式采取单向循环输送,即ⅰ号水泵8从ⅰ号浮筒5内向ⅱ号浮筒内6 抽送压舱水,ⅱ号水泵9从ⅱ号浮筒6内向ⅲ号浮筒7内抽送压舱水,ⅲ号水泵10从ⅲ号浮筒7内向ⅰ号浮筒5内抽送压舱水。
[0077]
如图1、图4所示,所述数据处理及控制装置3选用 stm32f103rct6嵌入式-微控制器作为整个系统的中央处理模块。风速风向传感器1采用cff3d-1型三维超声波风速风向传感器,检测风速风向信号;姿态传感器2采用mpu60509 轴运动处理传感器,检测漂浮式平台姿态信号。
[0078]
如图3~图6所示,本发明的深海半潜式风电机组对风获能及稳定性协同控制方法,具体步骤如下:
[0079]
(1)传感检测装置对信号的采集和传输;
[0080]
如图4所示,传感检测装置所需采集的信号为风速风向信号和半潜式风电机组漂
浮式平台的姿态信号,分别利用超声波风速风向传感器1和姿态传感器2实现测量,并将采集到的信号传输到数据处理及控制装置3。选用的cff3d-1型三维超声波风速风向传感器采集到的风速风向信号为数字量信号,mpu60509轴运动处理传感器自带a/d转换器,可将采集到的漂浮式平台姿态模拟量信号转换为数字量信号,检测信号都能够直接传输给数据处理及控制装置。
[0081]
(2)数据处理及控制装置对信号的分析和处理;
[0082]
所述数据处理及控制装置3接收到所述传感检测装置的检测信号,对其进行分析处理,根据风速风向信号判别是否需要控制偏航装置4转动机舱对风,同时根据漂浮式平台姿态信号判别是否需要控制漂浮式平台稳定调节装置调节漂浮式平台的平衡,通过协同控制偏航装置4和漂浮式平台稳定调节装置,使风电机组达到最佳偏航对风效果,捕获尽可能多的风能。具体步骤如下:
[0083]
a)根据风速风向传感器1检测到的风速风向信号,判别风电机组是否需要偏航对风。当风向与机舱位置夹角,即偏航角α大于临界值15
°
时,数据处理及控制装置3控制液压制动器19松开制动盘18,并控制启动4个偏航驱动电机12,偏航驱动电机12驱动行星齿轮减速器13运转,行星齿轮减速器13带动驱动小齿轮14运转,驱动小齿轮14驱动偏航轴承运转,使机舱相对塔架15转动对风。当机舱快要对准风向时,数据处理及控制装置3停止启动偏航驱动电机12,机舱在惯性作用下运动。同时,液压制动器19夹紧制动盘18,停止偏航。
[0084]
b)当数据处理及控制装置3控制偏航装置4转动机舱对风时,风轮所受气动载荷发生变化,变化的气动载荷经过风轮、机舱、塔架会传递至漂浮式平台,打破漂浮式平台受力、弯矩、扭矩的平衡,使漂浮式平台发生平动和旋转。当漂浮式平台发生旋转,其俯仰角或者横滚角大于漂浮式平台稳定调节装置启动的设定角度β时,数据处理及控制装置3控制漂浮式平台稳定调节装置调节漂浮式平台的平衡:
[0085]
首先定义惯性坐标系a和体坐标系b,以姿态传感器2 的检测原点和检测轴为坐标系原点和坐标轴建立体坐标系b,其原点对应于ⅱ号浮筒6上端盖中心点,x轴指向ⅲ号浮筒7 上端盖中心点,z轴垂直向上,y轴与x轴和z轴相交,并且满足右手法则。惯性坐标系a和体坐标b具有相同姿态和位置,其中惯性坐标系a永远固定不变,体坐标系b会随着漂浮式平台的运动而变化。
[0086]
漂浮式平台为等边三角形结构,设每两个浮筒中心距为 l,则三个浮筒端盖中心点相对于体坐标系b的位置矢量分别为:
[0087][0088]
b
p2=[0 0 0 1]
t
ꢀꢀ
(2)
[0089]
b
p3=[0 l 0 1]
t
ꢀꢀ
(3)
[0090]
公式(1)-(3)中的t表示矩阵的转置。
[0091]
当风向变化较大,风电机组偏航对风时,漂浮式平台受力状态会随之变化,整体力平衡条件会被破坏,进而产生平移和旋转,体坐标系b随之变化,根据姿态传感器2检测到漂浮式平台的姿态信号,计算出体坐标系b相对于全局坐标系a的位姿:
[0092]
假设姿态传感器2检测到漂浮式平台的姿态信号为ψ、θ和即体坐标系b相对于
全局坐标系a的旋转变化为:绕x
a
轴旋转ψ角(俯仰角),绕y
a
轴旋转θ角(横滚角),绕z
a
轴旋转角(航向角),另假设体坐标系b相对于全局坐标系a 的平移变化为:沿x
a
轴平移a个单位,沿y
a
轴平移b个单位,沿z
a
轴平移c个单位。
[0093]
当体坐标系b绕全局坐标系a的x
a
轴旋转ψ角时,其旋转矩阵为:
[0094][0095]
当体坐标系b绕全局坐标系a的y
a
轴旋转θ角时,其旋转矩阵为:
[0096][0097]
当体坐标系b绕全局坐标系a的z
a
轴旋转角时,其旋转矩阵为:
[0098][0099]
当体坐标系b沿全局坐标系a的x
a
轴平移a个单位,沿y
a
轴平移b个单位,沿z
a
轴平移c个单位,其变换矩阵为:
[0100][0101]
则体坐标系b相对于全局坐标系a的位姿描述为:
[0102][0103]
根据三个浮筒端盖中心点相对于体坐标系b的位置矢量和体坐标系b相对于全局坐标系a的位姿描述,计算出三个浮筒端盖中心点相对于全局坐标系a的位置矢量:
[0104][0105]
式中,i=1,2,3.
[0106]
联立式(1)-(9),得:
[0107][0108][0109][0110]
当横滚角ψ或者俯仰角θ大于漂浮式平台稳定调节装置启动的设定角度β时,数据处理及控制装置3控制漂浮式平台稳定调节装置调节漂浮式平台的平衡:
[0111]
由式(10)-(12)可知,漂浮式平台发生倾斜和位移时三个浮筒端盖中心点相对于全局坐标系{a}的z
a
轴坐标值分别为:
[0112][0113]
z
a2
=c
ꢀꢀ
(14)
[0114]
z
a3
=-sinθl+c
ꢀꢀ
(15)
[0115]
比较z
a1
、z
a2
和z
a3
大小,得到z
max
和z
min
,判别出漂浮式平台三个浮筒中位置最高桶和最低桶,控制相应水泵由最低筒向最高筒内输送压舱水,重新调节分配浮筒内压舱水水量,改变漂浮式平台重心位置,缩小浮筒间高度差,直至ψ≤β且θ≤β,漂浮式平台达到平衡控制的目的。
[0116]
(4)测量信号的显示与远程传输
[0117]
显示装置4是利用液晶显示屏与数据处理及控制装置3 之间的数据传输,将数据处理及控制装置3处理后得到的数字信号输出至液晶显示屏上,从而得到风速风向信号和半潜式风电机组漂浮式平台的姿态信号。当控制系统安装在海上风电场使用时,其数据则通过rs485传输至上位机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1