驱动控制装置、电源装置、风力发电装置以及控制方法与流程
1.本发明涉及一种风车用驱动控制装置、风车用电源装置、风力发电装置以及控制方法。
背景技术:
2.以往,已知有具备根据风向来调整叶片的方向的偏航控制功能的风力发电装置。这种风力发电装置例如已知有专利文献1所记载的技术。专利文献1所记载的风力发电装置是具有塔、机舱以及转子的风力发电装置,所述塔被设置在地上或海上,成为发电机的支柱,所述机舱被设置在塔上,内置发电机,所述转子被设置于机舱的一端,由接受风并将该风变换为旋转能量的轮毂和叶片构成。该风力发电装置具有偏航驱动装置,该偏航驱动装置被设置于塔与机舱的连结部,对机舱和转子相对于塔的位置进行控制。在专利文献1中记载有提供一种可利用率高的风力发电装置,其通过偏航驱动装置来解除偏航驱动力的传递,从而将因偏航驱动装置的故障造成的偏航控制问题的影响抑制到最小限度。
3.在由于因台风等暴风造成的齿轮的应变而发生了偏航轴承齿轮与小齿轮的固着的情况下,上述的风力发电装置解除偏航驱动力从小齿轮向偏航轴承齿轮的传递。上述的风力发电装置在偏航逆变器的电流超过了额定电流的情况下或超过了规定的联锁值的情况下,检测到偏航轴承齿轮与小齿轮的固着。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利申请公开号2015-140777
技术实现要素:
7.发明要解决的问题
8.在风力发电装置中,由于风车的大型化而使偏航驱动装置的设置台数变多。在偏航驱动装置的设置台数变多的情况下,存在在偏航轴承齿轮与小齿轮之间产生的负荷在偏航驱动装置间不均的情况。在偏航驱动装置中负荷的偏差变大的情况下,存在对于特定的偏航驱动装置产生过大的负荷的可能性。
9.本发明是考虑这种情况而完成的,其课题于提供一种能够有助于抑制驱动装置间的负荷的偏差的风车用驱动控制装置、风车用电源装置、风力发电装置以及控制方法。
10.用于解决问题的方案
11.为了解决上述的问题,本发明的一个方式所涉及的风车用驱动控制装置对多个驱动装置进行控制,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,所述风车用驱动控制装置具备:获取部,其获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及控制部,其在以使所述多个驱动装置中的每一个驱动装置产生规定的制动力的方式对所述多个驱动装置进行控制的状态下,基于由所述获取部获取到
的所述多个信息,来以使所述多个驱动装置中的至少一个驱动装置的制动力上升的方式对所述多个驱动装置进行控制。
12.根据该结构,能够使多个驱动装置中的至少一个驱动装置的制动力上升,因此能够减少负荷高的驱动装置的制动力以抑制驱动装置间的负荷的偏差。其结果,能够有助于抑制驱动装置间的负荷的偏差。
13.为了解决上述的问题,本发明的一个方式所涉及的风车用驱动控制装置对多个驱动装置进行控制,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,所述风车用驱动控制装置具备:获取部,其获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及控制部,其在以使所述多个驱动装置中的每一个驱动装置产生规定的制动力的方式对所述多个驱动装置进行控制的状态下,基于由所述获取部获取到的所述多个信息,来以使所述多个驱动装置中的至少一个第一驱动装置的制动力上升、并且使除所述第一驱动装置以外的第二驱动装置的制动力减少的方式对所述多个驱动装置进行控制。
14.根据该结构,使多个驱动装置中的至少一个第一驱动装置的制动力上升,并且使除第一驱动装置以外的第二驱动装置的制动力减少,因此能够抑制驱动装置间的负荷的偏差。
15.为了解决上述的问题,本发明的一个方式所涉及的风车用电源装置向多个驱动装置供给电力,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的制动部,所述风车用电源装置具备:电源电路,其向所述多个驱动装置中的每一个驱动装置供给电力;获取部,其获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及控制部,其在以向所述多个驱动装置中的每一个驱动装置供给规定的电力的方式对所述电源部进行控制的状态下,基于由所述获取部获取到的所述多个信息,来以使向所述多个驱动装置中的至少一个第一驱动装置的所述制动部供给的电力上升的方式对所述电源电路进行控制。
16.根据该结构,能够使向多个驱动装置中的至少一个第一驱动装置的所述制动部供给的电力上升,因此能够减少负荷高的驱动装置的制动力以抑制驱动装置间的负荷的偏差。其结果,能够有助于抑制驱动装置间的负荷的偏差。
17.为了解决上述的问题,本发明的一个方式所涉及的风车用电源装置向多个驱动装置供给电力,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的制动部,所述风车用电源装置具备:电源电路,其向所述多个驱动装置中的每一个驱动装置供给电力;获取部,其获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及控制部,其在以向所述多个驱动装置中的每一个驱动装置供给规定的电力的方式对所述电源电路进行控制的状态下,基于由所述获取部获取到的所述多个信息,来以使向所述多个驱动装置中的至少一个第一驱动装置供给的电力上升、并且使向除所述第一驱动装置以外的第二驱动装置供给的电力减少的方式对所述电源电路进行控制。
18.根据该结构,使向多个驱动装置中的至少一个第一驱动装置供给的电力上升,并且使向除第一驱动装置以外的第二驱动装置供给的电力减少,因此能够抑制驱动装置间的负荷的偏差。
19.为了解决上述的问题,本发明的一个方式所涉及的风力发电装置包括:多个驱动装置,其具备制动部、驱动部以及传递部,所述制动部产生用于使风力发电装置所包括的第二构造体相对于第一构造体相对地停止的制动力,所述制动部被供给的电力越高则产生越高的制动力,所述驱动部产生用于使所述第二构造体相对于所述第一构造体相对地移动的驱动力,所述传递部将所述制动力和所述驱动力传递到所述第一构造体;第一电源部,其向所述多个驱动装置的所述制动部供给第一电力;第二电源部,其向所述多个驱动装置的所述制动部供给比所述第一电力高的第二电力;切换部,其在从所述第一电源部向所述多个驱动装置供给第一电力的状态与从所述第二电源部向所述多个驱动装置供给第二电力的状态之间进行切换;获取部,其获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及控制部,其在通过以向所述多个驱动装置中的每一个驱动装置供给规定的电力的方式对所述电源部进行控制、从而以使所述多个驱动装置中的每一个驱动装置产生规定的制动力的方式对所述多个驱动装置进行控制的状态下,基于由所述获取部获取到的所述多个信息,来以使向所述多个驱动装置中的至少一个第一驱动装置供给的电力上升、并且使向除所述第一驱动装置以外的第二驱动装置供给的电力减少的方式对所述切换部进行控制,由此以使所述多个驱动装置中的至少一个第一驱动装置的制动力上升、并且使除所述第一驱动装置以外的第二驱动装置的制动力减少的方式对所述多个驱动装置进行控制。
20.根据该结构,以使向多个驱动装置中的至少一个第一驱动装置供给的电力上升、并且使向除第一驱动装置以外的第二驱动装置供给的电力减少的方式对切换部进行控制,由此以使多个驱动装置中的至少一个第一驱动装置的制动力上升、并且使除第一驱动装置以外的第二驱动装置的制动力减少的方式对多个驱动装置进行控制,因此能够抑制驱动装置间的负荷的偏差。
21.为了解决上述的问题,本发明的一个方式所涉及的控制方法是一种风车用驱动控制装置的控制方法,所述风车用驱动控制装置对使风力发电装置所包括的两个构造体相对地移动的多个驱动装置进行控制,所述控制方法包括以下步骤:获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及在以使所述多个驱动装置中的每一个驱动装置产生规定的制动力的方式对所述多个驱动装置进行控制的状态下,基于所述多个信息,来以使所述多个驱动装置中的至少一个驱动装置的制动力上升的方式对所述多个驱动装置进行控制。
22.根据该方法,能够使多个驱动装置中的至少一个驱动装置的制动力上升,因此能够减少负荷高的驱动装置的制动力以抑制驱动装置间的负荷的偏差。其结果,能够有助于抑制驱动装置间的负荷的偏差。
23.为了解决上述的问题,本发明的一个方式所涉及的控制方法是一种风车用驱动控制装置的控制方法,所述风车用驱动控制装置对使风力发电装置所包括的两个构造体相对
地移动的多个驱动装置进行控制,所述控制方法包括以下步骤:获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及在以使所述多个驱动装置中的每一个驱动装置产生规定的制动力的方式对所述多个驱动装置进行控制的状态下,基于所述多个信息,来以使所述多个驱动装置中的至少一个第一驱动装置的制动力上升、并且使除所述第一驱动装置以外的第二驱动装置的制动力减少的方式对所述多个驱动装置进行控制。
24.根据该方法,使多个驱动装置中的至少一个第一驱动装置的制动力上升,并且使除第一驱动装置以外的第二驱动装置的制动力减少,因此能够抑制驱动装置间的负荷的偏差。
25.为了解决上述的问题,本发明的一个方式所涉及的控制方法是一种风车用电源装置的控制方法,所述风车用电源装置向多个驱动装置供给电力,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的制动部,所述控制方法包括以下步骤:获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及在以向所述多个驱动装置中的每一个驱动装置供给规定的电力的方式对向所述多个驱动装置中的每一个驱动装置供给电力的电源电路进行控制的状态下,基于所述多个信息,来以使向所述多个驱动装置中的至少一个第一驱动装置的所述制动部供给的电力上升的方式对所述电源电路进行控制。
26.根据该方法,能够使向多个驱动装置中的至少一个第一驱动装置的所述制动部供给的电力上升,因此能够减少负荷高的驱动装置的制动力以抑制驱动装置间的负荷的偏差。其结果,能够有助于抑制驱动装置间的负荷的偏差。
27.为了解决上述的问题,本发明的一个方式所涉及的控制方法是一种风车用电源装置的控制方法,所述风车用电源装置向多个驱动装置供给电力,所述多个驱动装置使风力发电装置所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的制动部,所述控制方法包括以下步骤:获取与负荷有关的多个信息,所述负荷产生在所述多个驱动装置中的每一个驱动装置与所述两个构造体中的被提供了由所述多个驱动装置产生的力的构造体之间;以及在以向所述多个驱动装置中的每一个驱动装置供给规定的电力的方式对向所述多个驱动装置中的每一个驱动装置供给电力的电源电路进行控制的状态下,基于所述多个信息,来以使向所述多个驱动装置中的至少一个第一驱动装置供给的电力上升、并且使向除所述第一驱动装置以外的第二驱动装置供给的电力减少的方式对所述电源电路进行控制。
28.根据该方法,使向多个驱动装置中的至少一个第一驱动装置供给的电力上升,并且使向除第一驱动装置以外的第二驱动装置供给的电力减少,因此能够抑制驱动装置间的负荷的偏差。
29.发明的效果
30.根据本发明的一个方式,能够有助于抑制驱动装置间的负荷的偏差。
附图说明
31.图1是示出本发明的实施方式中的风力发电装置的一例的立体图。
32.图2是示出实施方式中的塔与偏航驱动装置之间的关系的俯视图。
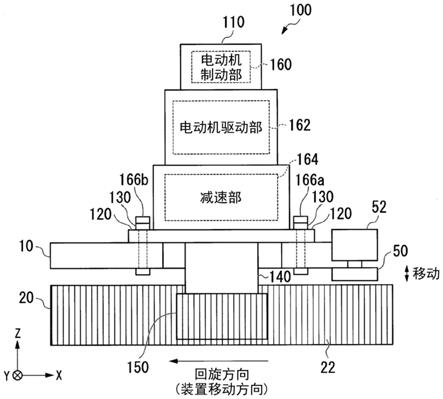
33.图3是示出实施方式中的偏航驱动装置的一例的图。
34.图4是示出实施方式中的风力发电装置的功能性的一例的框图。
35.图5是示出实施方式中的电源电路的一例的框图。
36.图6是示出实施方式中的控制的期间的图。
37.图7是示出实施方式中的使负荷接近均等的动作的一例的流程图。
38.图8是示出在实施方式中对制动力和电压进行控制的一例的图。图8的(a)是示出向负荷不为阈值以上的偏航驱动装置的制动部160供给的电压的变化的图。图8的(b)是示出负荷不为阈值以上的偏航驱动装置的制动力的变化的图。图8的(c)是示出向负荷为阈值以上的偏航驱动装置的制动部160供给的电压的变化的图。图8的(d)是示出负荷为阈值以上的偏航驱动装置的制动力的变化的图。
39.图9是示出实施方式中的多个偏航驱动装置各自的负荷的变化的图。
40.图10是示出在实施方式中对4台电磁制动器的制动力进行控制的一例的图。图10的(a)是示出偏航驱动装置100-1的制动力的变化的图。图10的(b)是示出偏航驱动装置100-2的制动力的变化的图。图10的(c)是示出偏航驱动装置100-3的制动力的变化的图。图10的(d)是示出偏航驱动装置100-4的制动力的变化的图。
41.图11是示出在实施方式中对4台电磁制动器的制动力进行控制的一例的图。图11的(a)是示出偏航驱动装置100-1的制动力的变化的图。图11的(b)是示出偏航驱动装置100-2的制动力的变化的图。图11的(c)是示出偏航驱动装置100-3的制动力的变化的图。图11的(d)是示出偏航驱动装置100-4的制动力的变化的图。图11的(e)是示出液压制动器的制动力的变化的图。
具体实施方式
42.参照附图来说明本实施方式所涉及的风车用驱动控制装置、风车用电源装置、风力发电装置以及控制方法。
43.图1是示出本发明的实施方式中的风力发电装置的一例的立体图。风力发电装置1具备例如机舱10、塔20、叶片30以及轮毂(hub)40。此外,塔20和机舱10是风力发电装置1所包括的两个构造体的一例。塔20和机舱10由于来自驱动装置(偏航驱动装置100)的力而相对地进行移动。另外,塔20是第一构造体的一例,第一构造体是风力发电装置1的固定配置的一部分,机舱10是第二构造体的一例。第二构造体由于来自偏航驱动装置100的驱动力而相对于第一构造体相对地移动,由于来自偏航驱动装置100的制动力而与第一构造体相对地停止。
44.机舱10被安装于塔20的上端(z方向上的端部)。叶片30借助轮毂40安装于机舱10。机舱10为了在偏航方向上调整叶片30和轮毂40的朝向而进行回旋驱动。在机舱10中内置有产生使该机舱10沿偏航方向旋转的偏航驱动力的偏航驱动机构。偏航驱动装置是驱动装置和风车用驱动装置的一例。驱动装置和风车用驱动装置根据风向而产生使叶片30和轮毂40的朝向(风车的朝向)旋转的力。偏航驱动装置根据风向而使叶片30和轮毂40的朝向(风车的朝向)旋转。此外,机舱10是没有被提供由驱动装置产生的力的构造体的一例。塔20是被提供了由驱动装置产生的力的构造体的一例。
45.塔20被嵌入到地上或海上。塔20具有从地上或海上沿铅垂方向向上延伸的形状。塔20的上端安装有机舱10。在塔20中内置有用于使机舱10沿偏航方向回旋驱动的环齿轮22。
46.叶片30是接受风力而产生旋转力的翼。在本实施方式中叶片30是三片。
47.轮毂40被安装于机舱10,并且轮毂40安装有多个叶片30。轮毂40将因叶片30接受到的风力而产生的旋转力(动力)传递到旋转轴。轮毂40经由旋转轴向机舱10传递基于风力的旋转力。
48.在轮毂40中内置有产生俯仰(pitch)驱动力的俯仰驱动机构,该俯仰驱动力使各叶片30沿俯仰方向旋转。针对每个叶片30设置产生俯仰驱动力的驱动机构。俯仰驱动机构通过根据风速使各叶片30沿俯仰方向旋转,来控制各叶片30的角度。
49.风力发电装置1将因叶片30的旋转而产生的动力从轮毂40传递到机舱10内的发电机(未图示),通过发电机将动力变换为电力。由此,风力发电装置1进行风力发电。
50.图2是示出实施方式中的塔与偏航驱动装置之间的关系的俯视图。
51.在机舱10中安装有产生偏航驱动力的偏航驱动装置100。在本实施方式中,4台偏航驱动装置100-1、100-2、100-3以及100-4被安装在机舱10中。之后,在对偏航驱动装置进行统称的情况下简记为“偏航驱动装置100”。在图2中,在塔20的内壁形成有环齿轮22。环齿轮22与偏航驱动装置100的小齿轮150啮合。通过电动机驱动力使偏航驱动装置100沿图2中的r方向旋转驱动。此外,也可以是,偏航驱动装置100还能够沿与r方向相反方向旋转。
52.当在环齿轮22与小齿轮150啮合的状态下,向机舱10或塔20等提供了阵风等的力的情况下,在环齿轮22与小齿轮150之间产生切向力。切向力是指在环齿轮22的齿轮形成面的切线方向产生的力。切向力向偏航驱动装置100中的减速部164提供扭转应力。另外,切向力向偏航驱动装置100中的固定器具提供拉伸应力和压缩压力。此外,在实施方式中,说明了在塔20中设置有环齿轮22并且在机舱10中固定有偏航驱动装置100的一例,但是并不限定于此,也可以在机舱10中设置相当于环齿轮22的齿轮部,在塔20中设置相当于偏航驱动装置100的偏航驱动装置。
53.图3是示出实施方式中的偏航驱动装置的一例的图。偏航驱动装置100具备例如壳体110、凸缘120、紧固螺栓130、输出轴140以及小齿轮150。在壳体110安装有凸缘120。凸缘120通过紧固螺栓130与机舱10连接。输出轴140的一端连接于壳体110和凸缘120的内部,在输出轴140的另一端设置有小齿轮150。小齿轮150以与环齿轮22啮合的方式配置。小齿轮150通过从输出轴140输出的驱动力进行回旋,使偏航驱动装置100沿回旋方向(装置驱动方向、-x方向)回旋。由此,偏航驱动装置100使机舱10的方向相对于塔20进行回旋。紧固螺栓130是固定器具的一例。固定器具是将偏航驱动装置100固定于机舱10中的要素。固定器具并不限定于紧固螺栓130,也可以是其它已知的构件。输出轴140和小齿轮150是传递部的一例。传递部是从偏航驱动装置100向塔20传递驱动力和制动力的要素。此外,在塔20中固定有驱动装置的情况下,传递部是从塔20向机舱10传递力的要素。
54.偏航驱动装置100具备制动部160、电动机驱动部162以及减速部164。制动部160对输出轴140产生制动力。此外,电动机制动部160向输出轴140直接提供制动力,但是并不限定于此,电动机制动部160也可以向输出轴140间接提供制动力。例如,可以是电动机制动部160的力被提供给与输出轴140不同的构件,从而从该构件被传递到输出轴140。电动机驱动
部162对输出轴140产生驱动力。制动部160根据从外部供给的控制信号而通过电磁作用产生制动力。制动部160是在被供给了电压的状态下产生制动力、在没有被供给电压的状态下不产生制动力的类型的电磁制动器。制动部160作为被供给的电力越高则产生越高的制动力的电磁制动器发挥功能。电动机驱动部162根据从外部供给的控制信号而通过电磁作用产生驱动力。减速部164使与通过输出轴140而产生的驱动力相应的旋转速度减小,使驱动转矩上升。此外,本实施方式产生驱动力和制动力,但是并不限定于此,也可以产生从用于使机舱10旋转的驱动力的方向反转的方向的驱动力来作为制动力。在该情况下,偏航驱动装置100也可以不具备电动机制动部160。
55.偏航驱动装置100还具备应变传感器166a和应变传感器166b。应变传感器166是获取与负荷有关的信息的获取部的一例。在对应变传感器166a和应变传感器166b进行统称的情况下简记为“应变传感器166”。应变传感器166输出与在紧固螺栓130产生的应变相应的信号。在紧固螺栓130产生的应变是根据切向力而变化的值。此外,在本实施方式中检测紧固螺栓130的应变来作为与负荷有关的信息,但是,并不限定于此,也可以检测在输出轴140与环齿轮22之间产生的转矩。偏航驱动装置100例如通过测定作用于输出轴140的力量来检测转矩。并且,也可以是偏航驱动装置100具备转矩测量仪,获取转矩测量仪的输出信号来作为与负荷有关的信息,该转矩测量仪用于检测将电动机驱动部162与电动机制动部160连结的输出轴140处的扭转。并且,偏航驱动装置100还可以是,在传递小齿轮150等的驱动力或制动力的齿轮中的齿轮基部具备应变片,获取应变片的输出信号来作为与负荷有关的信息。并且,偏航驱动装置100还可以是,检测输出轴140的输出扭转角与输出轴140的输入扭转角之差,获取表示检测出的差的信息来作为与负荷有关的信息。输出轴140的输出扭转角是电动机制动部160或电动机驱动部162附近处的输出轴140的扭转角,输入扭转角是小齿轮150附近处的输出轴140的扭转角。
56.风力发电装置1具备向环齿轮22提供制动力的液压制动器。液压制动器例如是卡钳制动机构。液压制动器具备液压制动器驱动部52和摩擦体50。液压制动器驱动部52根据从外部供给的控制信号来使摩擦体50沿图3中的z方向移动。液压制动器驱动部52通过将摩擦体50压紧到环齿轮22上来向环齿轮22提供制动力。风力发电装置1期望能够调整向环齿轮22施加的制动力。
57.图4是示出实施方式中的风力发电装置的功能性的一例的框图。此外,图4示出了用于在风力发电装置1中对偏航驱动力进行控制的功能性的一例。偏航驱动装置100具备例如控制部170、应变传感器166-1、166-2、166-3、166-4、制动部160-1、160-2、160-3、160-4、电动机驱动部162-1、162-2、162-3、162-4、电源电路180-1、180-2、180-3、180-4、液压制动器驱动部52以及风传感器200。此外,在之后的说明中对应变传感器166-1、166-2、166-3、166-4进行统称的情况下简记为“应变传感器166”。在对制动部160-1、160-2、160-3、160-4进行统称的情况下简记为“制动部160”。在对电动机驱动部162-1、162-2、162-3、162-4进行统称的情况下简记为“电动机驱动部162”。在对电源电路180-1、180-2、180-3、180-4进行统称的情况下简记为“电源电路180”。
58.应变传感器166-1相当于偏航驱动装置100-1中的应变传感器166a和应变传感器166b。应变传感器166-2相当于偏航驱动装置100-2中的应变传感器166a和应变传感器166b。应变传感器166-3相当于偏航驱动装置100-3中的应变传感器166a和应变传感器
166b。应变传感器166-4相当于偏航驱动装置100-4中的应变传感器166a和应变传感器166b。此外,也可以针对一个偏航驱动装置100配置多于两个的应变传感器166。
59.制动部160-1相当于偏航驱动装置100-1中的制动部160。制动部160-2相当于偏航驱动装置100-2中的制动部160。制动部160-3相当于偏航驱动装置100-3中的电动机驱动部162。制动部160-4相当于偏航驱动装置100-4中的制动部160。电动机驱动部162-1相当于偏航驱动装置100-1中的电动机驱动部162。电动机驱动部162-2相当于偏航驱动装置100-2中的电动机驱动部162。电动机驱动部162-3相当于偏航驱动装置100-3中的电动机驱动部162。电动机驱动部162-4相当于偏航驱动装置100-4中的电动机驱动部162。
60.风传感器200例如被设置于机舱10的上表面。风传感器200生成表示风的强度和风的朝向的信号(风检测信号)并供给到控制部170。
61.控制部170综合控制多个偏航驱动装置100。控制部170具备电源控制器172。控制部170通过例如cpu(central processing unit:中央处理单元)等处理器执行储存在程序存储器中的程序来实现。控制部170也可以通过lsi(large scale integration:大规模集成电路)、asic(application specific integrated circuit:专用集成电路)或fpga(field-programmable gate array:现场可编程门阵列)等硬件来实现,也可以通过软件与硬件协作来实现。控制部170是风车用驱动控制装置的一例,但也可以是,控制部170和应变传感器166是风车用驱动控制装置的一例。还可以是,控制部170、应变传感器166以及电源电路180是风车用电源装置的一例。
62.从应变传感器166-1、166-2、166-3以及166-4中的各个应变传感器向控制部170供给应变检测信号。从风传感器200向控制部170供给风检测信号。控制部170基于应变检测信号和风检测信号来向制动部160-1、160-2、160-3、160-4、电动机驱动部162-1、162-2、162-3、162-4以及液压制动器驱动部52输出控制信号。电源控制器172基于应变检测信号来向电源电路180-1、电源电路180-2、电源电路180-3以及电源电路180-4的各个电源电路输出控制信号。
63.图5是示出实施方式中的电源电路180的一例的框图。
64.电源电路180具备例如电源181、继电器182、ssr(固态继电器(solid state relay))183、ssr驱动器184、升压电源185、升压用ssr186、以及升压用驱动器187。图5所示的电源电路180与各偏航驱动装置100相对应。即,电源电路180按照偏航驱动装置100的数量设置于风力发电装置1中。多个电源电路180连接于一个电源控制器172。
65.电源181是将第一电力向各偏航驱动装置100供给的第一电源部的一例。第一电力是用于产生规定的制动力的电力,该规定的制动力是将使机舱10固定于塔20所需的制动力除以偏航驱动装置100的个数所得到的。电源181将第一电力向偏航驱动装置100供给,因此例如向偏航驱动装置100供给24伏特的电压。此外,第一电力可以高于将使机舱10固定于塔20所需的制动力除以偏航驱动装置100的个数所得的制动力,基于使机舱10固定于塔20所需的制动力和偏航驱动装置100的个数来发生变化。
66.继电器182是使电源181与ssr 183之间的连接状态在切断与导通之间切换的开关。继电器182根据来自电源控制器172的控制信号或来自未图示的控制部的信号来进行断开闭合动作。在从电源181向偏航驱动装置100供给电压的情况下,继电器182被切换成导通(闭合)状态,在不从电源181向偏航驱动装置100供给电压的情况下,继电器182被切换成切
断(断开)状态。
67.ssr 183是利用了半导体元件的电力开关的一例。ssr驱动器184基于来自电源控制器172的控制信号来产生用于对ssr 183的半导体元件进行驱动的驱动信号。ssr 183基于从ssr驱动器184供给的驱动信号来使继电器182与偏航驱动装置100之间的连接状态在切断与导通之间切换。在使偏航驱动装置100产生通常的制动力的情况下,ssr 183被切换成导通(闭合)状态,在不使偏航驱动装置100产生通常的制动力的情况下,ssr 183被切换成切断(断开)状态。
68.升压电源185是将高于第一电力的第二电力向各偏航驱动装置100供给的第二电源部的一例。第二电力是用于在使一部分偏航驱动装置100的制动力减少的情况下产生制动力的电力,该制动力是将由其它的偏航驱动装置100产生的所需的制动力除以该其它的偏航驱动装置100的个数所得到的。升压电源185将第二电力向偏航驱动装置100供给,因此例如向偏航驱动装置100供给35伏特的电压。
69.升压用ssr186是使用了半导体元件的电力开关的一例。升压用驱动器187基于来自电源控制器172的控制信号来产生用于驱动升压用ssr186的半导体元件的驱动信号。升压用ssr186基于从升压用驱动器187供给的驱动信号来使升压电源185与偏航驱动装置100之间的连接状态在切断与导通之间切换。
70.此外,电源电路180通过使电压供给源在电源181与升压电源185之间切换,来切换向各偏航驱动装置100供给的电压值,但是并不限定于此,电源电路180是对电力进行切换的结构即可。电源电路180也可以例如通过控制向偏航驱动装置100供给的电压的占空比来切换电力。
71.图6是示出实施方式中的控制的期间的图。
72.例如图6所示,控制部170预先设定驱动期间和停止期间。驱动期间是指基于风力发电装置1接受的风向来使机舱10的朝向移动的期间。停止期间是指使机舱10的朝向固定的期间。控制部170在驱动期间中进行使机舱10相对于塔20移动到目标位置的控制。控制部170在停止期间中进行使机舱10相对于塔20停止在目标位置的控制。使机舱10相对于塔20停止在目标位置的控制是对电源电路180进行控制以使向多个偏航驱动装置100中的每一个偏航驱动装置100供给第一电力。目标位置是指基于风向决定的、相对于塔20而言的机舱10的最佳的位置。
73.在驱动期间的开始定时到来的情况下,控制部170开始机舱10相对于塔20移动到目标位置的控制。控制部170将机舱10的位置定位于目标位置,直到驱动期间的结束定时到来为止。控制部170在停止期间中产生制动力,以使机舱10的位置固定于目标位置。由此,控制部170使控制在驱动期间与停止期间之间进行切换。此外,驱动期间是例如几分钟,停止期间是例如十几分钟。期望能够追随风向的变化来变更风力发电装置1的朝向,使得能够更有效率地进行发电。并且,还可以是在风力发电装置1具备风向传感器的情况下,当风向的变化的累积值超过了规定的角度的情况下,结束停止期间而开始驱动期间。还可以是驱动期间和停止期间能够配合设置风力发电装置1的土地的特性来调整。并且,暂时减少电磁制动器的制动力的期间是能够可靠地减少负荷的期间即可,例如可以为几微秒。另外,与减少电磁制动器的制动力的期间对应的电压为关断的期间例如可以是几微秒,还可以基于应变传感器166的检测值来变更。
74.之后,对使负荷在多个偏航驱动装置100间接近均等的动作进行说明。图7是示出实施方式中的使负荷接近均等的动作的一例的流程图。此外,图7所示的动作在停止期间按规定期间执行。
75.控制部170首先从应变传感器166-1、166-2、166-3以及166-4中的每一个应变传感器获取与负荷有关的信息(步骤s10)。控制部170针对与负荷有关的信息中的每一个信息来判定负荷是否为阈值以上(步骤s12)。控制部170在判定为负荷不为阈值以上的情况下(步骤s12:“否”),重复步骤s10的处理。控制部170在负荷为阈值以上的情况下(步骤s12:“是”),使负荷不为阈值以上的偏航驱动装置100的制动力上升,使负荷为阈值以上的偏航驱动装置100的制动力减少(步骤s14)。此外,负荷不为阈值以上的偏航驱动装置100是第一驱动装置的一例,负荷为阈值以上的偏航驱动装置100是第二驱动装置的一例。
76.图8是示出在实施方式中对电压和制动力进行控制的一例的图。图8的(a)是示出向负荷不为阈值以上的偏航驱动装置100的制动部160供给的电压的变化的图。图8的(b)是示出负荷不为阈值以上的偏航驱动装置100的制动力的变化的图。图8的(c)是示出向负荷为阈值以上的偏航驱动装置100的制动部160供给的电压的变化的图。图8的(d)是示出负荷为阈值以上的偏航驱动装置100的制动力的变化的图。
77.设为风力发电装置1在例如停止期间中向环齿轮22提供将由制动部160(电磁制动器)产生的制动力和由摩擦体50产生的制动力合计而得到的制动力f1。
78.控制部170在判定为偏航驱动装置100-1的负荷为阈值以上而偏航驱动装置100-2~4的负荷不为阈值以上的情况下,通过如图8的(a)所示那样使向偏航驱动装置100-2~4供给的电压上升,来如图8的(b)所示那样使偏航驱动装置100-2~4的电磁制动器的制动力暂时上升,通过如图8的(c)所示那样使向偏航驱动装置100-1供给的电压减少,来如图8的(d)所示那样使偏航驱动装置100-1的电磁制动器的制动力暂时减少。其结果,在偏航驱动装置100-1的制动力比小齿轮150与环齿轮22之间的力低的情况下,小齿轮150向负荷变小的方向旋转。由此,小齿轮150进行旋转后的负荷比电磁制动器的制动力被减少前的负荷小。此外,“使制动力减少”除了包括减少电磁制动器的制动力之外还包括使制动力为0。
79.图9是示出实施方式中的多个偏航驱动装置100的每一个偏航驱动装置100中的负荷的变化的图。图9示出了在4台偏航驱动装置100中的负荷为100%的情况下分散到4台偏航驱动装置100的每一台偏航驱动装置100的负荷(l)。
80.设为如图9的(a)所示那样偏航驱动装置100-1、100-2、100-3以及100-4的负荷各自为25%。该状态是风力发电装置1整体的负荷被均等地分散到4台的状态。在期间t1后,如图9的(b)所示,偏航驱动装置100-4的负荷变化为0%,偏航驱动装置100-1的负荷变化为50%。在该情况下,控制部170判定为偏航驱动装置100-1的负荷为阈值以上,在t1+t1的定时使偏航驱动装置100-2~4的制动力上升之后,减少偏航驱动装置100-1的制动力。此外,控制部170也可以同时执行使偏航驱动装置100-2~4的制动力上升的动作和使偏航驱动装置100-1的制动力减少的动作。由此,如图9的(c)所示,使偏航驱动装置100-1的负荷变化为0%,使其它的偏航驱动装置100-2、100-3、100-4的负荷变化为33%。由此,在期间t1后,从最高的负荷为50%且最低的负荷为0%的状态变化为最高的负荷为33%且最低的负荷为0%,由此能够抑制偏航驱动装置100间的负荷的偏差。
81.将之后的4台偏航驱动装置100的制动力控制为均等。此外,控制部170可以首先在
偏航驱动装置100-1中产生与风力发电装置1整体所需的制动力的1/4相应的量的制动力之后,将偏航驱动装置100-2、100-3、100-4的制动力控制为与风力发电装置1整体所需的制动力的1/4相应的量的制动力。另外,控制部170可以将4台偏航驱动装置100各自的制动力同时控制为与风力发电装置1所需的制动力的1/4相应的量的制动力。由此,如图9的(d)所示,能够在t1+t1+t2的定时使偏航驱动装置100-1、100-2、100-3以及100-4的负荷各自接近25%。其结果,能够进一步抑制偏航驱动装置100间的负荷的偏差。
82.图10是示出在实施方式中对4台电磁制动器的制动力进行控制的一例的图。图10的(a)是示出偏航驱动装置100-1的制动力的变化的图。图10的(b)是示出偏航驱动装置100-2的制动力的变化的图。图10的(c)是示出偏航驱动装置100-3的制动力的变化的图。图10的(d)是示出偏航驱动装置100-4的制动力的变化的图。
83.例如在时刻t10时停止期间开始的情况下,4台偏航驱动装置100分别利用电磁制动器产生制动力bf1。之后,在检测出偏航驱动装置100-1中的负荷为阈值以上的情况下,在时刻t11时,使偏航驱动装置100-2、100-3以及100-4的电磁制动器的制动力从bf1上升到bf2。之后,在时刻t12时,减少偏航驱动装置100-1的电磁制动器的制动力,在规定期间后的时刻t13时,将偏航驱动装置100-1的电磁制动器的制动力恢复为bf1。规定期间是足以减少偏航驱动装置100-1的负荷的期间即可。之后,在时刻t14时,使偏航驱动装置100-2、100-3以及100-4的电磁制动器的制动力从bf2降低到bf1。在时刻t15时停止期间结束的情况下,4台偏航驱动装置100分别利用电磁制动器将制动力减少为0。此外,使作为第一驱动装置的偏航驱动装置100-2、100-3以及100-4的电磁制动器的制动力上升,但是例如仅使偏航驱动装置100-2和100-3的制动力上升那样使除偏航驱动装置100-1以外的至少一个第一驱动装置的制动力上升即可。
84.图11是示出在实施方式中对4台电磁制动器的制动力进行控制的一例的图。图11的(a)是示出偏航驱动装置100-1的制动力的变化的图。图11的(b)是示出偏航驱动装置100-2的制动力的变化的图。图11的(c)是示出偏航驱动装置100-3的制动力的变化的图。图11的(d)是示出偏航驱动装置100-4的制动力的变化的图。图11的(e)是示出液压制动器的制动力的变化的图。
85.在时刻t10时停止期间开始的情况下,通过由液压制动器产生的制动力bf3和4台偏航驱动装置100各自的电磁制动器来产生制动力bf1。之后,在检测出偏航驱动装置100-1中的负荷为阈值以上的情况下,在时刻t11时,使液压制动器的制动力从bf3上升到bf4,使偏航驱动装置100-2、100-3以及100-4的电磁制动器的制动力从bf1上升到bf2。之后,在时刻t12时,减少偏航驱动装置100-1的电磁制动器的制动力,在规定期间后的时刻t13时,将偏航驱动装置100-1的电磁制动器的制动力恢复为bf1。之后,在时刻t14时,使液压制动器的制动力从bf4减少到bf3,使偏航驱动装置100-2、100-3以及100-4的电磁制动器的制动力从bf2减少到bf1。在时刻t15时停止期间结束的情况下,液压制动器将制动力减少为0,4台偏航驱动装置100分别通过电磁制动器将制动力减少为0。
86.(实施方式的效果)
87.以上说明的实施方式所涉及的风车用驱动控制装置对多个偏航驱动装置100进行控制,该多个偏航驱动装置100使风力发电装置1所包括的两个构造体(机舱10和塔20)相对地移动,风车用驱动控制装置具备:获取部166,其获取与负荷有关的多个信息,该负荷产生
在多个偏航驱动装置100中的每一个偏航驱动装置100与两个构造体中的被提供了由多个偏航驱动装置100产生的力的构造体之间;以及控制部170,其在以使多个偏航驱动装置100中的每一个偏航驱动装置100产生规定的制动力的方式对多个偏航驱动装置100进行控制的状态下,基于由获取部166获取到的多个信息,来以使多个偏航驱动装置100中的至少一个偏航驱动装置100的制动力上升的方式对多个偏航驱动装置100进行控制。根据该实施方式,能够使多个偏航驱动装置100之中的至少一个偏航驱动装置100的制动力上升,因此,能够减少负荷高的偏航驱动装置100的制动力以抑制偏航驱动装置100间的负荷的偏差。其结果,能够有助于抑制偏航驱动装置100间的负荷的偏差。即,根据该实施方式,由于能够使偏航驱动装置100的制动力上升,因此即使为了抑制偏航驱动装置100间的负荷的偏差而减少某个偏航驱动装置100的制动力,也能够抑制在风力发电装置1的整体中制动力不足。
88.实施方式的风力发电装置1从风力发电装置1的寿命的观点出发,期望在将机舱10相对于塔20的位置进行固定时,使施加到多个偏航驱动装置100的负荷变得均等。然而,存在因偏航驱动装置100中的输出轴140、小齿轮150等环齿轮22的机械性的精度、刚性而引起在偏航驱动装置100间发生负荷的不均等的情况。另外,实施方式的风力发电装置1采用通过针对机舱10的回旋轴配置多个偏航驱动装置100来分担负荷的构造。然而,由于偏航驱动装置100等的部件形状、部件安装精度的关系而存在实际的偏航驱动装置100间的负荷无法变得均等的情况。并且,伴随着近年的风力发电装置1的大型化,偏航驱动装置100的设置台数变多。由此,抑制偏航驱动装置100中的过大负荷和使偏航驱动装置100间的负荷均等的重要性提高。根据实施方式,为了解决这种问题,能够在通过使偏航驱动装置100的制动力上升来减少其它的偏航驱动装置100的制动力时分散过大的负荷,使负荷在多个偏航驱动装置100间接近均等。
89.其结果,根据实施方式,能够抑制风力发电装置1的寿命的缩短。并且,根据实施方式,能够抑制因偏航驱动装置100的损坏而造成的运转期间的缩短。
90.实施方式所涉及的风车用驱动控制装置对多个偏航驱动装置100进行控制,该多个偏航驱动装置100使风力发电装置1所包括的两个构造体相对地移动,风车用驱动控制装置具备:获取部,其获取与负荷有关的多个信息,该负荷产生在多个偏航驱动装置100中的每一个偏航驱动装置100与两个构造体中的被提供了由多个偏航驱动装置100产生的力的构造体之间;以及控制部170,其在以使多个偏航驱动装置100中的每一个偏航驱动装置100产生规定的制动力的方式对多个偏航驱动装置100进行控制的状态下,基于由获取部166获取到的多个信息,来以使多个偏航驱动装置100中的至少一个偏航驱动装置100的制动力上升、并且使除该偏航驱动装置100以外的偏航驱动装置100的制动力减少的方式对多个偏航驱动装置100进行控制。根据该实施方式,使多个偏航驱动装置100中的至少一个偏航驱动装置100的制动力上升,并且使除该偏航驱动装置100以外的偏航驱动装置100的制动力减少,因此,能够抑制偏航驱动装置100间的负荷的偏差。
91.实施方式所涉及的风车用电源装置向多个偏航驱动装置100供给电力,该多个偏航驱动装置100使风力发电装置1所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的电动机制动部160,风车用电源装置具备:电源电路180,其向多个偏航驱动装置100中的每一个偏航驱动装置100供给电力;获取部166,其获取与负荷有关的多个信息,该负荷产生在多个偏航驱动装置100中的每一个偏航驱动装置100与两个构造
体中的被提供了由多个偏航驱动装置100产生的力的构造体之间;以及电源控制器172,其在以向多个偏航驱动装置100中的每一个偏航驱动装置100供给规定的电力的方式对电源电路180进行控制的状态下,基于由获取部获取到的多个信息,来以使向多个偏航驱动装置100中的至少一个偏航驱动装置100的电动机制动部160供给的电力上升的方式对电源电路180进行控制。根据该实施方式,能够使向多个偏航驱动装置100中的至少一个偏航驱动装置100的电动机制动部160供给的电力上升,因此,能够减少负荷高的偏航驱动装置100的制动力以抑制偏航驱动装置100间的负荷的偏差。其结果,能够有助于抑制偏航驱动装置100间的负荷的偏差。即,根据该实施方式,由于能够使偏航驱动装置100的制动力上升,因此即使为了抑制偏航驱动装置100间的负荷的偏差而减少某个偏航驱动装置100的制动力,也能够抑制在风力发电装置1的整体中制动力不足。
92.实施方式所涉及的风车用电源装置向多个偏航驱动装置100供给电力,该多个偏航驱动装置100使风力发电装置1所包括的两个构造体相对地移动,并且具备被供给的电力越高则产生越高的制动力的电动机制动部160,风车用电源装置具备:电源电路180,其向多个偏航驱动装置100中的每一个偏航驱动装置100供给电力;获取部166,其获取与负荷有关的多个信息,该负荷产生在多个偏航驱动装置100中的每一个偏航驱动装置100与两个构造体中的被提供了由多个偏航驱动装置100产生的力的构造体之间;以及电源控制器172,其在以向多个偏航驱动装置100中的每一个偏航驱动装置100供给规定的电力的方式对电源电路180进行控制的状态下,基于由获取部166获取到的多个信息,来以使向多个偏航驱动装置100中的至少一个第一驱动装置100供给的电力上升、并且使向除第一驱动装置100以外的第二驱动装置100供给的电力减少的方式对电源电路180进行控制。根据该实施方式,能够使多个偏航驱动装置100中的至少一个偏航驱动装置100的制动力上升,并且使除该偏航驱动装置100以外的偏航驱动装置100的制动力减少,因此,能够抑制偏航驱动装置100间的负荷的偏差。
93.根据实施方式,能够实现风力发电装置1,该风力发电装置1包括:多个偏航驱动装置100,其具备电动机制动部160、电动机驱动部162以及输出轴140及小齿轮150,该电动机制动部160产生用于使风力发电装置1所包括的第二构造体10相对于第一构造体20相对地停止的制动力,该电动机制动部160被供给的电力越高则产生越高的制动力,该电动机驱动部162产生用于使第二构造体10相对于第一构造体20相对地移动的驱动力,该输出轴140及小齿轮150将制动力和驱动力传递到第一构造体20;电源181,其向多个偏航驱动装置100的电动机制动部160供给第一电力;升压电源185,其向多个偏航驱动装置100的电动机制动部160供给比第一电力高的第二电力;切换部(183、186),其在从电源181向多个偏航驱动装置100供给第一电力的状态与从升压电源185向多个偏航驱动装置100供给第二电力的状态之间进行切换;应变传感器166,其获取与负荷有关的多个信息,该负荷产生在多个偏航驱动装置100中的每一个偏航驱动装置100与两个构造体中的被提供了由多个偏航驱动装置100产生的力的构造体之间;以及控制部172,其在通过以向多个偏航驱动装置100中的每一个偏航驱动装置100供给规定的电力的方式对电源电路180进行控制、来以使多个偏航驱动装置100中的每一个偏航驱动装置100产生规定的制动力的方式对多个偏航驱动装置100进行控制的状态下,基于由应变传感器166获取到的多个信息,来以使向多个偏航驱动装置100中的至少一个第一偏航驱动装置100供给的电力上升、并且使向除第一偏航驱动装置100以
外的第二偏航驱动装置100供给的电力减少的方式对切换部(183、186)进行控制,由此以使多个偏航驱动装置100中的至少一个第一偏航驱动装置100的制动力上升、并且使除第一偏航驱动装置100以外的第二偏航驱动装置100的制动力减少的方式对多个偏航驱动装置100进行控制。根据该实施方式,使向多个偏航驱动装置100中的至少一个偏航驱动装置100供给的电力上升,并且使向除该偏航驱动装置100以外的偏航驱动装置100供给的电力减少,因此能够抑制偏航驱动装置100间的负荷的偏差。
94.也可以通过将用于实现以上所示的实施方式所涉及的控制部170的功能的程序记录在计算机可读取的记录介质中,使计算机系统读入记录在该记录介质中的程序并执行,从而进行处理。
95.此外,在此所说的“计算机系统”包含操作系统(os:operating system)或周围设备等硬件。
96.另外,“计算机可读取的记录介质”是指软盘、磁光盘、rom(read only memory:只读存储器)、快闪存储器等可写入的非易失性存储器、dvd(digital versatile disc:数字通用光盘)等可移动介质、内置于计算机系统的硬盘等存储装置。
[0097]“计算机可读取的记录介质”还包括像在经由因特网等网络或电话线路等通信线路发送了程序的情况下的成为信息处理装置、客户端的计算机系统内部的易失性存储器(例如dram(dynamic random access memory:动态随机存取存储器))那样将程序保持一定时间的记录介质。
[0098]
另外,上述的程序也可以被从将该程序储存在存储装置等中的计算机系统经由传输介质或利用传输介质中的传输波传输到其它的计算机系统。在此,传输程序的“传输介质”是指像因特网等网络(通信网)或电话线路等通信线路(通信线)那样具有传输信息的功能的介质。
[0099]
另外,上述的程序也可以是用于实现上述的功能的一部分的程序。上述的程序还可以是能够通过与已经记录在计算机系统中的程序的组合来实现上述的功能的程序的所谓的差分文件(差分程序)。
[0100]
以上,参照附图来详述了本发明的实施方式,但是具体的结构并不限于该实施方式,也包括不脱离本发明的主旨的范围内的设计变更等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1