用于识别内燃机的改变功率的操纵的方法和装置与流程
1.本发明涉及一种用于识别内燃机的改变功率的操纵的方法和装置。为此,内燃机具有进气道和压力传感器,其中,压力传感器布置在进气道中。
背景技术:
2.内燃机的控制可以这样设计,即从模型化的汽缸空气量中计算待喷射的燃料量。为了实现燃烧的希望的排放行为,与此相应地调节燃烧之前汽缸中的空气燃料比。在此,待喷射的燃料量大多情况下基于利用废气传感器测量的废气中的氧气浓度被自动地调整,使得调节出希望的空气燃料比。如果由于内燃机的操控提高了汽缸中的空气量,则因此燃料量被自动地提高,使得调节出希望的空气燃料比。由此可以提高内燃机的功率。当然,由于这种操纵,内燃机在其预先确定的运行范围之外运行,由此会损坏内燃机。
3.例如可以设想,借助于操纵装置修改内燃机的进气道中的压力传感器的测量信号,使得能够提高汽缸中的最大空气量。借助于这种操纵装置可能向控制器传递错误的压力,由此控制器这样控制内燃机,使得其在其预先确定的运行范围之外运行。
4.在其预先确定的运行范围之外运行的内燃机可能被损坏。
5.文献de 10 2012 001 356 a1公开了一种机动车的内燃机装置,具有至少一个增压压力传感器单元,其设置用于,至少间接地检测被增压的内燃机的进气管路中的实际增压压力,以及具有控制单元或调节单元,其与所述至少一个增压压力传感器单元通信地连接,其特征在于,所述控制单元或调节单元设置用于,在至少一种运行状态中将实际增压压力与至少一个测试值进行比较。
6.文献de 10 2011 108 697 a1公开了一种用于识别机动车的马达控制器的操纵的方法,其中,经计算的针对加速度的参考值与测量到的实际的加速度值进行比较。
技术实现要素:
7.本发明的任务是,提出一种方法和一种装置,利用该方法或利用该装置实现了内燃机的改变功率的操纵的可靠识别。
8.该任务通过独立权利要求的特征解决。本发明的有利的设计方案在从属权利要求中说明。
9.根据本公开文本,用于识别内燃机的功率可变的操纵的方法具有下列步骤,其中,内燃机具有进气道和布置在进气道中的压力传感器:
‑ꢀ
利用压力传感器在确定的时间段上检测信号走向,其中,从检测到的信号走向中获知周期性重复的检测到的信号走向区段,该检测到的信号走向区段表征进气道中的周期性重复的压力变化,
‑ꢀ
提供在确定的时间段上的模型化的信号走向,从模型化的信号走向中获知周期性重复的模型化的信号走向区段,该模型化的信号走向区段表征进气道中的预期的周期性重复的压力变化,
‑ꢀ
将表征检测到的信号走向的一个周期的进气道中的压力变化的、检测到的信号走向区段的至少一个信号部分与表征在同一周期期间进气道中的预期的压力变化的相应的模型化的信号走向区段的相应的信号部分进行比较,用以识别内燃机的改变功率的操纵。
10.内燃机的进气道在内燃机运行中向内燃机输送空气用于燃烧。布置在进气道中的压力传感器检测进气道中具有的、在运行中向内燃机输送的空气的压力。关于这一点,压力传感器输出测量信号,其表征进气道中具有的空气压力。进气道中的空气压力在内燃机运行中随时间而变化。如果例如内燃机的空气进入阀被打开,该空气进入阀控制从进气道到汽缸中的空气输送,则进气道中的空气压力相应地降低。这种空气压力变化可以例如被压力传感器检测到。如果内燃机具有多个汽缸,那么内燃机针对每个汽缸都具有隶属的空气进入阀,它们相应被操控地允许空气在运行中进入内燃机的汽缸中。因此,进气道中的空气压力还根据汽缸或进入阀的操控和数量而变化。根据一实施方式,压力传感器是进气管压力传感器,其沿空气流动方向布置在内燃机的空气进入阀上游。根据一实施方式,进气管压力传感器沿空气流动方向直接布置在内燃机的空气进入阀上游。根据一另外的实施方式,压力传感器是增压压力传感器,其沿空气流动方向布置在废气涡轮增压机的压缩机下游和节流阀上游。根据一其它的实施方式,增压压力传感器沿空气流动方向直接布置在废气涡轮增压机的压缩机下游。根据一其它的实施方式,在内燃机的进气道中也可以布置多个压力传感器,在此,例如所述压力传感器中的一个可以是进气管压力传感器且所述压力传感器中的另一个可以是增压压力传感器。
11.根据本公开文本,利用压力传感器检测信号走向。此外,从检测到的信号走向中获知周期性重复的检测到的信号走向区段。检测到的信号走向区段表征在确定的时间段上进气道中的周期性重复的压力变化。由于打开的空气进入阀,进气道中的压力变化基本上是周期性的。一个周期在此是在该过程重复之后的最小的时间间隔。如果例如内燃机具有2个汽缸,那么例如当两个汽缸中的一个的空气进入阀第一次打开时一个周期开始,且一旦同一进入阀即将再次打开,该周期就结束。一个周期因此相当于内燃机的一个工作间隙。从检测到的压力传感器的信号走向中因此可以比较简单地获知信号走向区段,其表征进气道中的周期性重复的压力变化,方式为,检测到的信号走向被相应地划分和配属给工作间隙。检测到的信号走向区段中的一个因此相当于进气道中的重复的压力变化的一个周期。
12.根据本公开文本,提供模型化的信号走向,从中获知周期性重复的模型化的信号走向区段。模型化的信号走向区段在此表征在进气道中的预期的周期性重复的压力变化。模型化的信号走向根据一实施方式被保存在控制单元的存储器中并且从该存储器中被读取且被继续处理。模型化的信号走向例如在针对内燃机的各种不同的运行状态研发内燃机时被获知且因此被保存在存储器中。在内燃机的变化的参数、诸如转速或载荷的情况下以及在变化的周围环境参数诸如周围环境温度或周围环境压力的情况下,进气道中的预期的空气压力发生变化且与此相应地应该调整所提供的模型化的信号走向。根据一实施方式,模型化的信号走向考虑这样的参数,使得针对内燃机的所有运行条件提供相应的模型化的信号走向。如同从检测到的信号走向中获知检测到的信号走向区段一样,从模型化的信号走向中获知模型化的信号走向区段。根据一另外的实施方式,也可以直接提供模型化的信号走向区段。
13.根据本公开文本,将检测到的信号走向区段的信号部分中的一个与相应的模型化的信号走向区段的相应的信号部分进行比较。在此,检测到的信号走向区段表征在一个周期期间,例如在一个工作间隙期间,进气道中的压力变化。此外,相应的模型化的信号走向区段表征在同一周期期间进气道中的预期的压力变化。因此,将检测到的信号走向区段的该信号部分与相应的模型化的信号走向区段的相应的信号部分进行比较。信号部分例如是相应的信号走向区段的特征性的信号偏转、特征性的梯度变化、局部的或全局的最大值、局部的或全局的最小值、幅度或相位。如果检测到的信号走向区段的待比较的信号部分是其全局的最大值,那么相应的模型化的信号走向区段的信号部分也是其全局的最大值。
14.模型化的信号走向是可确定的,例如在内燃机的研发过程中在测试台上,使得能够比较简单地提供模型化的信号走向。同样地,能够特别简单地从提供的模型化的信号走向中获知周期性重复的模型化的信号走向区段,方式为,优选信号走向参照借助于相应的周期被划分到模型化的信号走向区段中。
15.如果内燃机已被操控,以便例如实现来自内燃机的更高的功率,则可能使内燃机在其预先确定的运行范围之外运行。更高的功率可以例如通过如下方式实现,即,提高进气道中的压力且因此也提高内燃机的汽缸中的压力。进气道中的压力的这种变化可以在信号检测到的走向区段的信号部分中被识别到。如果现在将检测到的信号走向区段的相应的信号部分与相应的模型化的信号走向区段的相应的信号部分进行比较,则可以例如识别到与内燃机的相应的模型化状态相比提高的压力。由于进气道中的提高的压力,可以推断出内燃机的改变功率的操纵。这种识别是比较简单和可靠的并且可以在内燃机的整个运行范围上进行。因此可行的是,以很简单和可靠的方式和方法仅借助于利用压力传感器检测信号走向、提供模型化的信号走向且分析两个走向识别到,是否内燃机被操纵。
16.根据一实施方式,在比较检测到的信号走向区段的信号部分与相应的模型化的信号走向区段的相应的信号部分时考虑信号部分差,该信号部分差相当于检测到的信号走向区段的信号部分和相应的模型化的信号走向区段的信号部分之间的时间差。如果例如检测到的信号走向区段的信号部分是检测到的信号走向区段的全局的最大值且因此相应的模型化的信号走向区段的相应的信号部分是其全局的最大值,那么可以通过如下方式计算信号部分差,即,在检测到的信号走向区段中出现全局的最大值的时间点与在模型化的信号走向区段中出现全局的最大值的时间点彼此相减。该信号部分差因此是在出现一个全局的最大值和另一个全局的最大值之间的时间差。如果例如内燃机的压力传感器和/或压力传感器的测量信号到控制单元上的传递被这样操纵,即,在检测到的信号走向中可识别到关于模型化的信号走向的时间延迟,可以因此根据该实施方式特别简单地识别到,内燃机被改变功率地操纵。
17.根据一其它的实施方式,当信号部分差超过第一阈值时,识别到内燃机上的改变功率的操纵。信号差可以根据一实施方式连续地被内燃机的控制单元进行分析且该分析可以与此相应地与第一阈值进行比较。一旦信号部分差超过一阈值,与此相应地可以推断出内燃机的改变功率的操纵。这种比较可以比较简单地实现且可靠地说明,是否内燃机被操纵。
18.根据一实施方式,从第一信号走向区段中借助于傅里叶变换产生检测到的信号走向函数,其表征检测到的信号走向区段。附加地根据该实施方式获知检测到的信号走向函
数的相位并且将获知的相位作为检测到的信号走向区段的信号部分与模型化的相位作为相应的模型化的信号走向区段的相应的信号部分进行比较,其中,模型化的相位作为模型化的信号走向区段的部分被提供。
19.根据一其它的实施方式,模型化的相位也可以从相应的模型化的信号走向区段中获知。借助于傅里叶变换可以从检测到的信号走向区段中产生检测到的信号走向函数。与此相应地,检测到的信号走向函数表征检测到的信号走向区段且与此相应地也表征在一个周期期间进气道中的压力变化。借助于傅里叶变换可以更简单地识别到信号走向函数的相应的信号部分,使得简化了从信号走向函数中的相应的信号部分的比较。与此相应地,用于识别内燃机的改变功率的操纵的方法更稳健和更可靠。
20.根据一其它的实施方式,傅里叶变换是离散的傅里叶变换。
21.根据一实施方式,将检测到的信号走向函数的刚好一个相位作为信号部分与相应的模型化的信号走向区段的相应的模型化的相位进行比较。在此,模型化的信号走向或者说模型化的信号走向区段这样被提供,使得从中能够获知模型化的相位,该模型化的相位可与所获知的相位进行比较。一种相位是在确定的时间在信号走向区段中或在信号走向函数中相应的点的位置。如果该比较与预先确定的值偏离,与此相应地可以推断出内燃机的操纵。模型化的相位作为模型化的信号走向区段的信号部分可以根据一实施方式被保存在存储器中并且从存储器中提供用于比较。
22.根据一其它的实施方式,从模型化的信号走向区段中借助于傅里叶变换产生模型化的信号走向函数,其表征进气道中的预期的周期性重复的压力变化。附加地从模型化的信号走向函数中获知并提供模型化的相位。可以设想,在存储器中保存模型化的信号走向区段并且借助于计算单元从信号走向区段中借助于傅里叶变换产生模型化的信号走向函数,由此使得模型化的信号走向函数的相应的信号部分能够与检测到的信号走向函数的相应的信号部分简化地比较。从模型化的信号走向函数中可以获知为了与所获知的相位进行比较所需的模型化的相位,由此使得能够执行比较,以便识别是否内燃机被操纵。由此可以确保,始终将彼此可比较的信号部分彼此进行比较。
23.根据一实施方式,将模型化的信号走向作为特征场提供,该特征场考虑内燃机的运行参数。内燃机的运行参数可以例如是转速或负载。相应于内燃机的运行参数,根据该实施方式调整模型化的信号走向,使得相应的模型化的信号走向区段或相应的模型化的信号走向函数能够与检测到的信号走向区段或检测到的信号走向函数进行比较。该特征场可以根据一实施方式是一数学模型,该数学模型根据内燃机的运行参数和/或根据周围环境参数提供模型化的信号走向和/或模型化的信号走向区段和/或模型化的信号走向函数和/或相应的信号部分。因此以特别简单的方式和方法实现了,即使在内燃机的不同的运行点也能确认内燃机的改变功率的操纵。
24.根据一其它的实施方式,模型化的信号走向区段的相位根据内燃机的至少一个运行参数来提供。如已经描述的那样可以设想,模型化的信号走向的相位被提供作为相应的模型化的信号走向的信号部分,以便与检测到的信号走向区段的所获知的相位进行比较。可以设想,所获知的相位根据内燃机的运行参数诸如转速和/或负载而改变。与此相应地,模型化的相位同样必须根据内燃机的运行参数而改变,由此使得能够执行用于识别内燃机的改变功率的操纵的更合适的比较。与此相应地,即使在变化的运行参数的情况下也可以
提供模型化的相位,从而即使在变化的运行参数下该方法也能够稳健和可靠地识别内燃机的操纵。
25.根据一实施方式,为了比较检测到的信号走向区段的信号部分与相应的模型化的信号走向区段的相应的信号部分,获知作为检测到的信号走向区段的信号部分所获知的相位和作为相应的模型化的信号走向区段的信号部分的模型化的相位的相位差。所获知的相位和模型化的相位的相位差是特征性的信号区段,诸如检测到的信号走向区段的过零点,和相应的特征性的信号区段,诸如相应的模型化的信号走向区段的相应的过零点之间的时间差。相位差因此表征出现模型化的信号走向区段的特征性的信号区段和出现相应的检测到的信号走向区段的特征性的信号区段的时间偏差。如果检测到的信号走向区段在时间上与模型化的信号走向区段有偏差,则该偏差可借助于相位差的获知来辨识到。在过强偏差的情况下,可以推断出内燃机的操纵。
26.根据一实施方式,将所获知的相位差与相位差阈值进行比较,并且当所获知的相位差超过相位差阈值时,识别到内燃机的改变功率的操纵。相位差阈值可以例如被保存在存储器中且连续地与所获知的相位差进行比较。一旦识别到所获知的相位差超过相位差阈值,就可以推断出内燃机被操纵。与此相应地,借助于该比较特别简单地确认,是否内燃机被操纵。
27.根据一实施方式,本公开文本的阈值也可以是边界带,其中,当要与边界带比较的值突破边界带时,识别到内燃机的改变功率的操纵。
28.根据本发明,用于识别内燃机的改变功率的操纵的装置具有控制单元,其设置用于控制前述的方法。该装置可以例如是马达控制单元。也可以设想,该装置是马达控制单元的一部分或者作为附加的控制单元被加装,例如在具有内燃机的车辆中。
附图说明
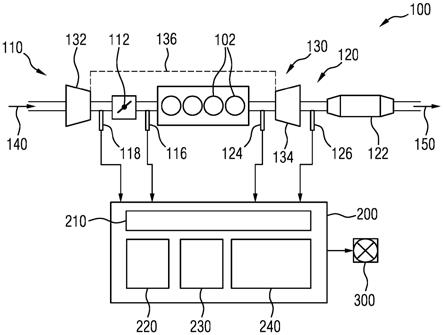
29.本公开文本的实施例在附图中示出并参照下面的描述被详细阐释。其中:图1 在示意图中示出了内燃机的方框图,图2 示出了用于识别内燃机的改变功率的操纵的图表。
具体实施方式
30.图1在示意图中示出了具有多个汽缸102的内燃机100,其中,内燃机100例如设置用于驱动车辆。内燃机100具有进气道110。进气道110在运行中向内燃机输送空气140。为了在内燃机100的运行中控制空气输送,进气道110具有节流阀112。
31.内燃机100附加地具有废气道120。废气道具有废气催化器122。废气道120附加地具有废气压力传感器124和废气传感器126。废气压力传感器124设置用于检测废气道中的废气150的压力。废气传感器126设置用于检测测量信号,该测量信号表征废气150中的氧气含量。内燃机100根据该实施方式具有废气涡轮增压机130。废气涡轮增压机130具有压缩机132和涡轮机134。压缩机132与涡轮机134借助于轴136机械连接。涡轮机134布置在废气150的流动路径中并且借助于废气150被驱动。压缩机132在内燃机100的运行中压缩空气140,之后将空气输入到汽缸102中。
32.进气道110根据该实施方式具有压力传感器116、118。压力传感器116、118中的一
个是进气管压力传感器116且压力传感器116、118中的另一个是增压压力传感器118。进气管压力传感器116在空气140的流动路径中布置在节流阀112和汽缸102的进入阀之间。增压压力传感器118在空气140的流动路径中布置在节流阀112上游和压缩机132下游。进气管压力传感器116和增压压力传感器118在内燃机100的运行中检测在传感器116、118的相应的加装位置处具有的空气140的压力。
33.内燃机100根据该实施方式附加地具有控制单元200,其具有计算单元210、程序存储器220、数据存储器230和故障存储器240。控制单元200还设置用于,处理进气管压力传感器116、增压压力传感器118、废气压力传感器124和废气传感器126的测量信号且与此相应地控制内燃机100。
34.内燃机100的控制可以例如借助于节流阀112的控制来进行。如果例如废气传感器126检测到,在内燃机100的运行中废气150中的氧气含量相对较低,则由控制单元识别到,在内燃机100中发生了过浓的燃烧,于是这样控制内燃机100,使得空气输送被提高。在这方面可以相应地操控节流阀112,使得相应地调节出针对汽缸102中希望的燃烧的希望的空气/燃料比。
35.控制单元200设置用于借助于计算单元210来控制内燃机100,该计算单元利用来自程序存储器220的程序、利用来自数据存储器230的数据以及利用来自内燃机100的传感器的数据这样控制内燃机100,使得内燃机100在预先确定的运行范围中运行,在该运行范围中能够保证内燃机100的可靠运行。倘若识别到内燃机100在其预先确定的运行范围之外运行,则可以进行到故障存储器240中的故障输入。内燃机100附加地具有故障显示装置300,其可由控制单元200操控,倘若控制单元200识别到内燃机100被改变功率地操纵的话。
36.如果内燃机100例如以提高内燃机100的最大功率的目标被这样操纵,使得汽缸102中的空气量被提高,则燃料量自动地被提高,使得调节出希望的空气燃料比。马达功率随之升高。当然内燃机100由此在其预先定义的运行范围之外运行,由此会损坏内燃机100。
37.已知操纵系统,借助于操作系统可以修改压力传感器116、118的检测到的测量信号,使得能够提高汽缸中的最大空气量。借助于这种操纵系统例如降低了由压力传感器116、118检测到的测量信号,例如方式为,从检测到的测量信号中减去确定的值,并且将降低的测量信号传递到控制单元200。控制单元200将补偿汽缸102中假定的过低的空气压力且例如操纵节流阀112,使得提高馈入的空气量。与此相应地,汽缸102中的空气压力升高,由此调整了燃料注入。内燃机100与此相应地在其预先定义的运行范围之外运行且其功率升高。内燃机100被操纵。
38.控制单元200当然构造用于识别内燃机100的这种操纵。
39.图2 示出了用于识别内燃机100的改变功率的操纵的图表。在该图表中在x轴410上绘制了时间且在y轴420上绘制了值,该值表征进气道110中的压力。在图表400中示出了模型化的信号走向430和检测到的信号走向440。模型化的信号走向430可以被划分成模型化的信号走向区段432。检测到的信号走向440可以被划分成检测到的信号走向区段442。模型化的信号走向区段432和检测到的信号走向区段442相当于相应的信号走向430、440中的一个周期。图1中示出的控制单元200构造用于从信号走向430、440中识别,是否内燃机100被操纵。为此,从利用压力传感器116、118检测到的信号走向440中获知周期性重复的检测到的信号走向区段442。检测到的信号走向区段442在此表征进气道110中的周期性重复的
压力变化。附加地,例如从控制单元200的程序存储器220和/或从数据存储器230中提供模型化的信号走向430,从该模型化的信号走向中获知周期性重复的模型化的信号走向区段432。模型化的信号走向区段432表征进气道110中的预期的周期性重复的压力变化。控制单元200接下来将检测到的信号走向区段442中的至少一个信号部分与相应的模型化的信号走向区段432的相应的信号部分进行比较。针对该比较,将同一周期的相应的信号走向区段432、442进行比较。如果内燃机100例如这样被操纵,即,利用压力传感器116、118测量的压力被过低地传递到控制单元200,则检测到的信号走向区段442与模型化的信号走向区段432相比具有时间上的偏差。该时间上的偏差可以被检测到且可以作为相应的信号走向区段432、442的相应的信号部分彼此进行比较。如果该偏差例如与预先给定的阈值偏离过远,则可以识别到内燃机100被操纵。与此相应地,控制单元200可以将一故障存储到故障存储器240中。此外,控制单元200可以相应地操控故障显示装置300,用以显示该操纵。
40.可以设想,检测到的信号走向区段442借助于傅里叶变换被发展成检测到的信号走向函数。此外也可以设想,模型化的信号走向区段432,其例如被存储在控制单元200的数据存储器230中,借助于傅里叶变换被发展成模型化的信号走向函数。检测到的信号走向函数的相应的信号部分与模型化的信号走向函数的相应的信号部分的比较可以被简化,因为借助于傅里叶变换可以更简单地处理所产生的信号走向函数。也可以设想,傅里叶变换是离散的傅里叶变换。
41.根据一实施方式,模型化的信号走向430和/或模型化的信号走向区段432和/或模型化的信号走向函数作为特征场被提供,该特征场考虑内燃机100的运行参数。该特征场可以例如被保存在控制单元200的数据存储器230中且相应地顾及到内燃机100的运行参数,诸如转速和/或负载。
42.根据一实施方式,检测到的信号走向区段442或检测到的信号走向函数的相位作为信号部分与模型化的信号走向区段432、与模型化的信号走向区段432和/或模型化的信号走向函数的相位作为相应的信号部分彼此进行比较。在此可以尤其是将两个相位的差彼此进行比较且当相位差超过确定的相位差阈值时,可以识别到内燃机100被操纵。以用于操纵内燃机100的值加载利用压力传感器116、118检测到的压力导致数据检测中的时间上的偏差。该偏差作为该比较中的相位差是可见的。因此可以以简单和稳健的方式识别到内燃机100的操纵。如果识别到内燃机100被操纵,附加地也可以进行到控制单元200的故障存储器240中的故障输入。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1