一种采用流动控制的推力矢量喷管
1.本发明涉及一种推力矢量喷管,特别涉及一种采用流动控制的推力矢量喷管。
背景技术:
2.推力矢量是实现水下航行器在全航速范围内优异机动性的重要功能。传统的推力矢量实现方式是采用机械结构实现推进器的偏转,或是通过调整推进器后尾喷口的方向实现推进器尾流的偏转,这种实现方式结构复杂,执行机构多,可靠性差,会占用较多推进器后部空间,在频繁操纵时还会产生强烈的机械振动噪声,不利于水下航行器声学设备的工作。随着水下航行器应用越来越广,对水下航行器的振动噪声特性要求越来越高,对具有低振动噪声特性、结构紧凑、可靠性高的推力矢量实现方式需求越来越明显。因此,设计一种能够满足水下航行器推力矢量功能需求、具有低振动噪声特性的推力矢量喷管是很有必要的。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种采用流动控制的推力矢量喷管,能满足水下航行器推力矢量功能需求,并且具有低振动噪声特性等特点。
4.为了实现上述目的,本发明采用以下技术方案:
5.一种采用流动控制的推力矢量喷管,包括管体及沿周向分布在所述管体外侧的多个引流管组件;
6.所述管体的前端内壁上沿周向设有分别与各引流管组件前端连通的多个引流入口;所述管体的后端内壁上沿周向设有分别与各引流管组件的后端连通的多个引流喷口。
7.所述引流管组件包括进流管、出流管及连接在进流管和出流管之间的射流泵,其中进流管的末端与相对应的所述引流入口连通;所述出流管的末端与相对应的引流喷口连通。
8.所述进流管和所述出流管同轴安装,且轴线与所述管体轴线平行。
9.所述引流入口为圆形结构;所述引流喷口为沿周向设置的弧形狭缝结构。
10.所述射流泵包括轮缘电机、一级叶轮、一级导叶、二级叶轮及二级导叶,其中一级叶轮、一级导叶、二级叶轮及二级导叶依次同轴安装,所述轮缘电机安装在所述二级叶轮的轮缘外侧,用于驱动所述二级叶轮和一级叶轮同步转动。
11.所述管体包括依次连接的前段、中段、后段及喷口;
12.所述进流管设置于前段的外侧,所述引流入口设置于前段的内壁上;
13.所述射流泵设置于所述中段的外侧;
14.所述出流管设置于后段的外侧,所述引流喷口设置于所述后段与喷口的连接处。
15.所述喷口的内表面为流线扩张型曲面。
16.所述前段为由前向后逐渐收缩的锥台型结构。
17.所述中段和后段为圆柱体结构。
18.相邻两个所述引流管组件之间均设有加强筋,所述加强筋沿轴向设置于所述管体的外侧。
19.本发明具有以下优点及有益效果:
20.1.本发明可直接安装在具有导管的推进器后部,实现全方位推力矢量功能。
21.2.本发明的推力矢量喷管不需要复杂机械结构和执行机构,通过稳定运行的射流泵实现推力矢量功能,振动噪声低,可靠性高。
22.3.本发明的推力矢量喷管采用轮缘电机直接驱动二级叶轮,实现射流泵的功能,结构紧凑,占用空间少。
附图说明
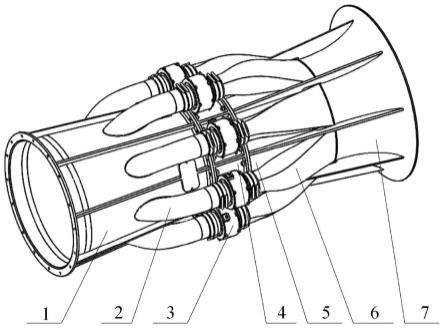
23.图1为本发明一种采用流动控制的推力矢量喷管的轴测图;
24.图2为本发明一种采用流动控制的推力矢量喷管的左视图;
25.图3为本发明一种采用流动控制的推力矢量喷管的剖视图;
26.图4为本发明中射流泵叶轮部分的轴测图;
27.图5为本发明一种采用流动控制的推力矢量喷管的操纵原理示意图;
28.图6为本发明实施例中产生向上操纵力时的工作示意图;
29.图7为本发明实施例中产生向右上方操纵力时的工作示意图;
30.图8为本发明实施例中产生向右操纵力时的工作示意图。
31.其中:1为前段,2为进流管,3为轮缘电机,4为中段,5为后段,6为出流管,7为喷口,8为一级叶轮,9为一级导叶,10为二级叶轮,11为二级导叶,12为引流入口,13为引流喷口。
具体实施方式
32.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
33.如图1-3所示,本发明提供的一种采用流动控制的推力矢量喷管,包括管体及沿周向分布在管体外侧的多个引流管组件,管体的前端内壁上沿周向设有分别与各引流管组件前端连通的多个引流入口12,管体的后端内壁上沿周向设有分别与各引流管组件的后端连通的多个引流喷口13。
34.本发明的实施例中,管体包括依次连接的前段1、中段4、后段5及喷口7,具体地,前段1、中段4和后段5通过法兰盘和螺栓连接固定,后段5和喷口7通过焊接固定。前段1为由前向后逐渐收缩的锥台型结构,中段4和后段5为圆柱体结构,喷口7的内表面为流线扩张型曲面。
35.进一步地,相邻两个引流管组件之间均设有加强筋,加强筋沿轴向设置于管体的外侧。
36.如图1-3所示,本发明的实施例中,引流管组件包括进流管2、出流管6及连接在进流管2和出流管6之间的射流泵,其中进流管2的末端与相对应的引流入口12连通,出流管6的末端与相对应的引流喷口13连通。
37.进一步地,进流管2设置于前段1的外侧,引流入口12设置于前段1的内壁上;射流泵设置于中段4的外侧,且通过橡胶管、抱箍等与进流管2的出口和出流管6的入口连接;出
流管6设置于后段5的外侧,引流喷口13设置于后段5与喷口7的连接处。进流管2和出流管6同轴安装,且轴线与管体轴线平行。
38.进一步地,引流入口12为圆形结构,引流喷口13为沿周向设置的弧形狭缝结构。
39.如图3-4所示,本发明的实施例中,射流泵包括轮缘电机3、一级叶轮8、一级导叶9、二级叶轮10及二级导叶11,其中一级叶轮8、一级导叶9、二级叶轮10及二级导叶11依次同轴安装,轮缘电机3安装在二级叶轮10的轮缘外侧,直接驱动二级叶轮10转动,二级叶轮10旋转时同步带动一级叶轮8旋转。射流泵能够将管体的前段1内的部分流体引入,在后段5和喷口7连接处的边缘喷出,在喷口7的喷口曲面作用下诱导主流发生偏转,进而产生推力矢量效果。射流泵还可以采用由轮缘电机3驱动单级或更多级数的叶轮的形式。
40.本发明的实施例中,管体的外侧设有八个引流管组件,即前段1上设有有八个进流管2,进流管2的引流入口12位于前段1内,进流管2的出口为圆形,后段5上设有八个出流管6,出流管6的入口为圆形,并与进流管2的出口一一对应,并保证一定同轴度,出流管6的出口(引流喷口13)为弧形狭缝,位于后段5与喷口7的连接处,并且出流管6的出口位于喷口7的内表面,喷口7的内表面为流线型扩张曲面。
41.本发明提供的一种采用流动控制的推力矢量喷管的工作原理是:
42.如图5所示,推力矢量喷管安装在推进器尾部后,推进器尾流依次流过推力矢量喷管的的前段1、中段4、后段5和喷口7;当推力矢量喷管上部射流泵工作时,通过引流入口12会将前段1内的部分流体引入,经过进流管2、射流泵、出流管6,在出流管6的弧形狭缝出口喷出,在喷口7的流线扩张型内表面的作用下会诱导推进器尾流发生偏转,进而产生推力矢量效果。
43.本实施例中,推力矢量喷管在工作时,通过同时启动四个射流泵实现推力矢量作用最强,操纵力最大,并控制推力矢量方向。如图6所示,当同时启动上部四个射流泵时,会诱导推进器尾流向上偏转,推力矢量喷管产生向上的操纵力;如图7所示,当同时启动右上方四个射流泵时,会诱导推进器尾流斜向右上方偏转,推力矢量喷管产生向右上方向的操纵力;如图8所示,当同时启动右侧四个射流泵时,会诱导推进器尾流向右偏转,推力矢量喷管产生向右的操纵力。
44.本发明在使用过程中,不需要复杂机械结构和执行机构,只需要控制各组射流泵的启停并调节射流泵的转速即可产生可调的推力矢量功能,避免了传统机械式推力矢量喷管的强烈振动噪声,有利于在保证水下航行器机动性的同时降低水下航行器的自噪声,能够满足水下航行器低噪音推力矢量功能需求,为精密声学设备提供有利的工作环境。
45.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1