基于超宽带电磁波的风力发电机叶片净空距离测量方法与流程
1.本发明属于风力发电机技术领域,特别涉及一种基于超宽带电磁波的风力发电机叶片净空距离测量方法。
背景技术:
2.在风力发电机中,叶片是外部运动部件,也是造成重大事故的主要故障来源。当外部强风超过设计门限,而风机未能及时变桨或停机,叶片就可能出现变形过大、发生叶片末端和塔筒碰撞,进而导致重大设备损失甚至人员伤亡。另一方面,如果叶片结构出现损伤或存在制造缺陷,即使在安全风速范围内,也可能出现远大于设计的变形,同样导致重大事故。
3.如果不对叶片净空距离进行测量,那么就必须进行保守设计。这一方面体现在叶片的设计上,通过加强叶片的强度可以减少叶片的变形,但这必然增加叶片的重量,增加整个风力发电机系统的成本。另一方面体现在风力发电机采用更保守的方式工作,这可以是通过变桨来减少叶片风力载荷,也可以是降低停机的门限风速。但保守的工作方式必然会导致发电量的减少,直接减少风力发电机的效益。
4.由于叶片净空距离测量的重要性,已经出现了很多采用不同原理的测量方法。其中有的方案采用激光雷达对叶片进行测距。激光雷达通过测量反射回来的光波延时进行测距。该方案成本高,且在雨雾环境下工作性能下降。有的方案采用毫米波雷达进行测距,毫米波雷达通过测量反射回来的毫米波延时进行测距。毫米波雷达环境适应性较好,但是也具有成本高、暴雨天性能下降的问题。有的方案采用超声波雷达对叶片进行测距,超声波雷达通过测量反射回来的超声波延时进行测距。超声波雷达成本低,但是测量精度略低。还有的方案采用视频图像识别的方案进行测距,该方案在雨雾环境下的性能也会显著下降。
技术实现要素:
5.为了克服上述现有技术的缺点,本发明的目的在于提供一种基于超宽带电磁波的风力发电机叶片净空距离测量方法,以期具有良好的精度、灵敏度、抗干扰性以及稳定性,且能够降低成本以及功耗,并适用于各种极端气候。
6.为了实现上述目的,本发明采用的技术方案是:
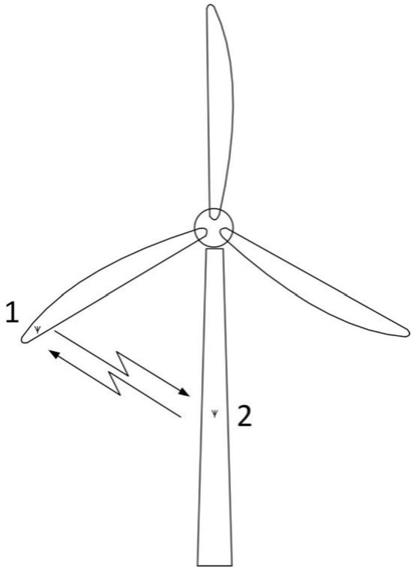
7.一种基于超宽带电磁波的风力发电机叶片净空距离测量方法,在风力发电机叶片的末端安装叶片收发机1,在塔筒或者地面安装固定收发机2,通过叶片收发机1和固定收发机2之间的电磁波信号至少应答收发一次测量出二者之间的距离,该距离随叶片转动实时动态变化,以该距离为基础,结合风力发电机的空间参数,计算叶片与塔筒的净空距离。
8.具体地,所述叶片收发机1或固定收发机2发出第一个电磁波信号并记录当前时间,固定收发机2或叶片收发机1收到所述第一个电磁波信号后立刻延时一个已知时间,发出第二个电磁波信号,叶片收发机1或固定收发机2接收到第二个电磁波信号并记录当前时间,根据叶片收发机1或固定收发机2测量到的发送电磁波信号和接收到电磁波信号的时间
差,即可计算出电磁波信号的传播时间,进而获得收发机之间的空间距离。
9.优选地,所述电磁波信号为中心频率13ghz以下、带宽100mhz以上的超宽带电磁波信号。
10.在叶片转动的1
‑
2个周期内,所述距离随时间呈周期性变动,通过在叶片运动过程中进行多点的距离测量,得到距离随时间变化的曲线,进而计算出叶片收发机1和固定收发机2之间的最短距离d,并利用如下的计算方式1或者计算方式2计算叶片净空距离:
11.计算方式1:
12.以固定收发机2为球心,确定一个半径为d的球面11,风机旋转轴12的方位角、俯仰角已知,叶片收发机1在空间的运动轨迹即叶片末端运动轨迹13是一条以风机旋转轴12为对称轴的空间封闭圆曲线,多次测量得到的空间封闭圆曲线构成了互不相交的曲线集,其中与球面11相切的空间封闭圆曲线即叶片收发机1的运动轨迹,基于该相切的曲线即可得出叶片与塔筒的净空距离;
13.计算方式2
14.在塔筒与叶片收发机1运动轨迹下沿高度相同的位置安装一圈多个固定收发机2,或者在固定收发机2外加一圈可切换的多个天线;选择方位角与风机旋转轴12方位角一致的固定收发机2,或者切换天线使得固定收发机2的方位角与风机旋转轴12的方位角一致;叶片收发机1和固定收发机2之间随时间变化的最短距离d即叶片与塔筒的净空距离;当没有固定收发机2和与风机旋转轴12方位角完全一致时,选取最靠近的固定收发机2,并利用三角公式和方位角差对得到的最短距离d进行修正,得出叶片与塔筒的净空距离。
15.本发明的计算方式3:所述固定收发机2有两个,分别为固定收发机一21和固定收发机二22,固定收发机一21和固定收发机二22同时或在极短时间内先后对叶片收发机1进行配对距离测量,分别获得测量瞬间的距离d1和d2,d1和d2以固定收发机一21和固定收发机二22位置的连线为旋转轴旋转得到圆线14,通过对叶片收发机1的连续多次测量,获得一组沿旋转轴相互平行且直径不同的圆线14,该组圆线14构成一个以旋转轴为中心的旋转对称的曲面;其中,在同时配对距离测量时,有且仅有一条曲线落在该曲面内,基于该曲线即可计算叶片与塔筒的净空距离;在极短时间内先后配对距离测量时,没有任何曲线落入该曲面内,此时利用逼近方法,先找出末端运动轨迹曲线集合中在加权意义上离该曲面最近的那根曲线,再计算叶片与塔筒的净空距离。
16.本发明的计算方式4:所述固定收发机2有三个且不共线安装,分别为固定收发机一21、固定收发机二22和固定收发机三23,固定收发机一21、固定收发机二22和固定收发机三23同时或在极短时间内先后对叶片收发机1进行配对距离测量,分别获得测量瞬间的距离d1、d2和d3,进而确定空间两个坐标点,其中一个坐标点即叶片末端的真实位置,另一个坐标点是以固定收发机一21、固定收发机二22和固定收发机三23构成的对称面的镜像点,通过对叶片收发机1的连续多次测量,即可基于叶片末端的真实位置确定叶片末端运动轨迹13,进而计算出叶片与塔筒的净空距离。
17.本发明的计算方式5:以塔筒的轴线为z轴建立球坐标系,其中方位角从+x轴转向+y轴,俯仰角θ从+z转向
‑
z轴,所述固定收发机2同时具有测距和角度测量能力,能够测量出与叶片收发机1的瞬时距离d’以及叶片收发机1相对于固定收发机2的方位角单次测量能够确定以固定收发机2为原点,方位角为的扇面上的半径为d’,θ从0度变到180度的
半圆曲线15,通过对叶片收发机1的连续多次测量,获得一组角度不同,半径d’不同的半圆曲线,该组半圆曲线构成一个连续曲面;叶片末端轨迹是一组由旋转轴矢量,圆心位置、半径为变量的曲线集合,其中:在没有测量误差的情况下,叶片末端轨迹曲线中有且仅有一条落在该连续曲面内,基于该曲线即可计算出叶片与塔筒的净空距离;在有测量误差的情况下,叶片末端轨迹曲线中没有任何一条落入该连续曲面内,此时利用逼近方法,先找出叶片末端轨迹曲线集合中在加权意义上离该曲面最近的那根曲线,再计算叶片与塔筒的净空距离。
18.本发明的计算方式6:所述固定收发机2有两个且均同时具有测距和角度测量能力,分别为固定收发机一21和固定收发机二22,固定收发机一21和固定收发机二22的轴向不平行,二者对叶片收发机1进行测量,分别获得半圆曲线二16和半圆曲线三17,半圆曲线二16和半圆曲线三17的交点即叶片末端的真实位置,通过对叶片收发机1的连续多次测量,即可基于叶片末端的真实位置确定叶片末端运动轨迹13,进而计算出叶片与塔筒的净空距离。
19.与现有技术相比,本发明的有益效果是:
20.1、本发明使用超宽带电磁波信号,可以适用于暴雨、雾、雪等各种极端气候,实现了真正的全天候。
21.2、由于采用了应答的工作模式,设备灵敏度高,抗干扰性好,在任意叶片桨角下均能稳定工作,对叶片表面的污染、变色不敏感。
22.3、可以显著降低设备功耗和设备成本。
附图说明
23.图1是测量固定收发机和叶片收发机之间距离的示意图。
24.图2是确定固定收发机和叶片收发机之间最短距离的原理图。
25.图3是利用收发机间最短距离和叶片旋转轴方位角、俯仰角确定叶片净空距离的示意图。
26.图4是利用收发机间最短距离和叶片旋转轴方位角确定叶片净空距离的示意图。
27.图5是利用两对收发机之间距离确定叶片净空距离的示意图。
28.图6是利用三对收发机之间距离确定叶片净空距离的示意图。
29.图7是利用具有角度、距离测向能力的固定收发机确定叶片净空距离的示意图。
30.图8是利用两个具有角度、距离测向能力的固定收发机确定叶片净空距离的示意图。
具体实施方式
31.下面结合附图和实施例详细说明本发明的实施方式。
32.如图1所示,本发明为一种风力发电机叶片净空距离测量方法,基于超宽带电磁波信号实现,与已有测距方案所采用的反射波测距不同,本发明在风力发电机叶片的末端安装叶片收发机1,在塔筒或者地面安装固定收发机2,通过叶片收发机1和固定收发机2之间的电磁波信号至少一次的超宽带电磁波信号应答发送,测量出二者之间的距离,该距离随叶片转动实时动态变化,以该距离为基础,结合风力发电机的空间参数,即可计算叶片与塔
筒的净空距离。
33.叶片收发机1和固定收发机2之间距离的具体测量过程以及原理如下:
34.测距时,叶片收发机1或固定收发机2发出第一个电磁波信号并记录当前时间,固定收发机2或叶片收发机1收到第一个电磁波信号后立刻或者延时一个已知时间,发出第二个电磁波信号,叶片收发机1或固定收发机2接收到第二个电磁波信号并记录当前时间,发出第一个电磁波信号的收发机记录的发射、接收信号的时间差,同时包含了收发机发送电磁波信号所需的处理时间和电磁波在空间往返传播时间。由于收发机的延时处理时间(如有)已知,因此根据测量到的发送电磁波信号和接收到电磁波信号的时间差,减去收发机已知的延时时间,可以算出电磁波的传播时间,进而得到两个收发机之间的距离。根据电磁波的互易性原理,交换叶片收发机1和固定收发机2的发射顺序,可以获得完全相同的测量结果。
35.为了提高距离测量精度,叶片收发机1和固定收发机2之间的电磁波往返次数可以大于1次。譬如可以采用叶片收发机1发射,固定收发机2接收后发射,叶片收发机1接收后再发射,固定收发机2接收。采用这种三次发射的方案,叶片收发机1和固定收发机2分别可以完成一个完整的往返测量,再结合算法就能够实现更高的测量精度。
36.本发明的超宽带电磁波信号,其中心频率一般在13ghz以下,可以适用于暴雨、雾、雪等各种极端气候,实现了真正的全天候。由于采用了应答的工作模式,设备灵敏度高,抗干扰性好,还可以显著降低设备功耗和设备成本。
37.已有的雷达方案都是测量落在激光、毫米波、超声波波束内的叶片区域距离雷达的距离。随着叶片的运动,不同的叶片区域进入波束照射范围,雷达就得到了叶片不同区域距离具体塔筒的距离。与已有方案不同,本发明测量的是叶片上一个固定点到固定收发机2之间的距离。随着叶片的转动,测量到的是叶片上一固定点(即叶片收发机1的位置)到另一固定点(即固定收发机2的位置)之间的距离变化。这个测量值本身并不是叶片净空距离,需要额外的处理才能获得真实的净空距离。
38.由于电磁波辐射的方向性,每个收发机只能覆盖一定的水平角度,以下仅以实现叶片净空距离测量所需的最少收发机数目进行原理说明。为了实现360度覆盖,需要相应增加收发机个数,也可以利用一个收发机外加射频开关在多个天线中进行时分切换。
39.叶片收发机1和固定收发机2的距离随着叶片的转动而变动。在不同时间上,由于叶片的转速、风力的大小,二者之间的距离值为一个复杂的函数。但是在一两个周期内,可以认为该距离值随时间呈周期性变动。根据周期性假设,通过在叶片运动过程中进行多点的距离测量,可以得到图2所示的距离随时间变化的曲线,进而计算出叶片收发机1和固定收发机2之间的最短距离d。
40.下面介绍对测量值的几种不同处理并获取净空距离的方法。
41.方式1,利用最短距离d和风机旋转轴的方位角、俯仰角信息。
42.参考图3,以固定收发机2为球心,确定一个半径为d的球面11,风机旋转轴12(图3中点划线)的方位角、俯仰角已知,根据周期性假设,叶片收发机1在空间的运动轨迹即叶片末端运动轨迹13是一个以风机旋转轴12为对称轴的空间封闭圆曲线(图3中实线),随着风力大小的不同,该封闭圆曲线会沿着风机旋转轴12的方向前后移动。而且随着叶片的形变,该封闭圆曲线的半径也会发生变化。所有可能产生的封闭圆曲线的空间位置信息是一个已
知完备集。在风机旋转轴12的方位角、俯仰角已知时,多次测量得到的空间封闭圆曲线构成了一组互不相交的曲线集,在这组曲线集中,有的曲线和球面11不相交,有的曲线和球面11有两个交点。其中有一根曲线和球面11相切,产生一个交点,该相切的曲线即叶片收发机1的运动轨迹,也即,确定该相切的曲线后,即可得出叶片与塔筒的净空距离。
43.方式2,利用最短距离d和风机旋转轴方位角信息。
44.如图4所示,在塔筒与叶片收发机1运动轨迹下沿高度相同的位置安装一圈多个固定收发机2,或者在单个固定收发机2外加一圈可切换的多个天线。由于风机旋转轴12的方位角已知,所以可以选择和该方位角一致的那个固定收发机2,或者切换天线使得单个固定收发机2的方位角与风机旋转轴12的方位角一致。此时,叶片收发机1沿叶片末端运动轨迹13(图4中实线)移动,它和该固定收发机2之间随时间变化的最短距离d即叶片与塔筒的净空距离。当没有固定收发机2和与风机旋转轴12方位角完全一致时,可选取最靠近的固定收发机2,此时的测量结果与真实的净空距离将产生一定的误差,通过已知的固定收发机2和旋转轴的方位角差,可以利用三角公式和方位角差对得到的最短距离d进行修正,得出叶片与塔筒的净空距离。
45.方式3,利用两个固定收发机2,分别为固定收发机一21和固定收发机二22。
46.如图5所示,固定收发机一21和固定收发机二22同时对叶片收发机1进行配对距离测量,可分别获得测量瞬间的距离d1和d2,当然d1、d2的测量也可以在极短的时间内,以先后测量的方式完成,但此时叶片会产生一定位移,导致引入测量误差。
47.以固定收发机一21和固定收发机二22位置的连线为旋转轴(图5中点划线),在已知d1、d2的前提下,可以在空间确定一个圆线14(图5中虚线)。通过对叶片收发机1的连续多次测量,可以获得一组沿旋转轴相互平行且直径不同的圆线14,该组圆线14构成一个以旋转轴为中心的旋转对称的曲面。在周期性假设前提下,叶片末端运动轨迹13是一组由旋转轴矢量,圆心位置、半径为变量的曲线集合。在没有测量误差的情况下,这组曲线中,有且仅有一条曲线落在该曲面内,基于该曲线即可计算叶片与塔筒的净空距离。在有测量误差的情况下,会出现没有任何曲线落入该曲面内的情况,此时可以利用最小似然法、加权最小似然法等常用的逼近方法,先找出叶片末端轨迹曲线集合中在加权意义上离该曲面最近的那根曲线,再计算叶片与塔筒的净空距离。
48.方式4,利用三个且不共线安装的固定收发机2,分别为固定收发机一21、固定收发机二22和固定收发机三23。
49.如图6所示,利用固定收发机一21、固定收发机二22和固定收发机三23同时对叶片收发机1进行配对距离测量,分别获得测量瞬间的距离d1、d2和d3,当然d1、d2、d3的测量也可以在极短的时间内,以先后测量的方式完成,但此时叶片会产生一定位移引入测量误差。
50.由于固定收发机一21、固定收发机二22和固定收发机三23的位置已知,因此根据距离d1、d2、d3可以确定空间两个坐标点,其中一个坐标点即叶片末端的真实位置,另一个坐标点是以固定收发机一21、固定收发机二22和固定收发机三23构成的对称面的镜像点。由于塔筒是金属结构,电磁波发射时有方向性,并且无法穿透塔筒,所以镜像点可以自动排除。通过对叶片收发机1的连续多次测量,即可基于叶片末端的真实位置确定叶片末端运动轨迹13(图6中实线),进而计算出叶片与塔筒的净空距离。
51.该方法可以直接确定叶片末端运动轨迹13,对叶片轨迹没有先验性周期性假设,
测量稳定性最高,但是所需的收发机也最多。
52.方式5,要求固定收发机2同时具有测距和角度测量能力。
53.如图7所示,以塔筒的轴线为z轴建立球坐标系,其中方位角从+x轴转向+y轴,俯仰角θ从+z转向
‑
z轴,固定收发机2不仅可以测量出与叶片收发机1的瞬时距离d’,还可以测量出叶片收发机1相对于固定收发机2的方位角所以单次测量能够确定以固定收发机2为原点,方位角为的扇面上的半径为d’,θ从0度变到180度的半圆曲线15(图7中虚线),通过对叶片收发机1的连续多次测量,可以获得一组角度不同,半径d’不同的半圆曲线,该组半圆曲线构成一个连续曲面。
54.在周期性假设前提下,叶片末端运动轨迹13是一组由旋转轴矢量、圆心位置、半径为变量的曲线集合,其中:在没有测量误差的情况下,这组曲线中,有且仅有一条曲线落在该连续曲面内,基于该曲线即可计算出叶片与塔筒的净空距离;在有测量误差的情况下,会出现没有任何一条曲线落入该连续曲面内的情况,此时可以利用最小似然法、加权最小似然法等常用的逼近方法,先找出叶片末端轨迹曲线集合中在加权意义上离该曲面最近的那根曲线,再计算叶片与塔筒的净空距离。
55.方式6,要求固定收发机2有两个且均同时具有测距和角度测量能力,分别为固定收发机一21和固定收发机二22,且固定收发机一21和固定收发机二22的轴向不平行。
56.如图8所示,固定收发机一21和固定收发机二22对叶片收发机1进行测量,分别获得半圆曲线二16和半圆曲线三17,半圆曲线二16和半圆曲线三17的交点即叶片末端的真实位置,通过对叶片收发机1的连续多次测量,即可基于叶片末端的真实位置确定叶片末端运动轨迹13,进而计算出叶片与塔筒的净空距离。对方案也没有先验性周期性假设,测量稳定性高。
57.上面的几种方式中固定收发机均安装在塔筒上,但是这些固定收发机也可以在地面上进行安装。地面上设置固定收发机的优点是安装简单,但是由于增加了和叶片收发机1之间的距离,必须加大所有收发机的发射功率,对收发机的供电提出了更高的要求。
58.上面的实例中,给出了每种方法所需的最少收发机个数。采用更多收发机时,方程从确定方程变为过定方程,此时利用最小似然法等过定方程处理方法即可求解。采用更多收发机可以减少系统的测量误差,增加测量的稳定性,但是需要付出系统复杂度的代价。上面的实例方法也可以组合进行应用,从而提高测量精度。
59.一个风力发电机有三个叶片,三个叶片都需要进行叶尖与塔筒净空距离的测量。所以在实际系统中,三个叶片的末端都需要安装收发机。当然,为了增加系统冗余度,同一个叶片的不同位置也可以安装多个收发机。
60.超宽带电磁信号的带宽越宽,电磁脉冲的持续时间越短,对距离的测量精度就越高。为了保证叶片净空距离的精度优于1米,考虑到各种测量误差的累计效应,超宽带电磁信号的带宽需要大于100mhz。
61.为了实现本发明中的超宽带电磁信号的发射、处理,既可以利用商用芯片,也可以自己构建电路实现。现有的商用芯片中decawave公司的dw1000芯片组具有测距功能。decawave公司的dw3000芯片组,nxp公司的sr100t芯片组,mauna kea semiconductor(瀚巍微电子)公司的mk8000芯片组都同时具有测距和测角的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1