用于架设塔架的系统和相应的方法与流程
1.本发明涉及一种用于架设塔架的系统。
背景技术:
2.申请人名下的ep3146131b1公开了一种用于组装风力发电机的塔架的系统,该塔架由一系列子部分组成,该系统包括:
[0003]-用于升降待组装塔架的升降结构,该升降结构包括被配置用于接合子部分的窗口的可伸缩臂,
[0004]-用于提升所述升降结构以能够将下一子部分放置在待组装塔架下方的支撑结构。
[0005]
支撑结构和升降结构可以类似于两个伸缩式保持架,其中,升降结构的滑动通过在升降结构和支撑结构之间的不同高度处相互作用的引导元件而稳定。
[0006]
升降结构的提升使用置于支撑结构顶部的线缆和滑轮执行。该支撑结构的尺寸被设计成吸收由引导元件引起的弯矩。该支撑结构相当笨重,并且组装或拆卸相对复杂。
[0007]
升降结构包括抵靠塔架以帮助保持塔架在升降结构内竖直的保持臂,并且建造和操作也相对复杂。
技术实现要素:
[0008]
本发明旨在进一步改进在ep3146131b1中公开的系统,并且本发明的示例性实施方式涉及一种用于组装风力发电机的塔架的系统,该塔架包括一系列子部分,该系统包括:
[0009]-多个升降支腿,
[0010]-可在升降支腿上竖直移动的升降结构,所述升降结构包括用于保持待组装塔架的刚性升降框架,所述升降框架包括载荷传递构件,并且所述升降结构包括在载荷传递构件和升降支腿之间相互作用以用于提升或降低升降结构的自爬升机构,
[0011]-可相对于升降框架在缩回配置和夹持配置之间移动的至少第一组夹持臂。
[0012]
由于自爬升机构的存在,因此可以简化支撑结构。
[0013]
此外,因为升降结构的框架是刚性的,所以不再需要在升降结构的不同高度处操作的引导元件,并且升降结构可以仅通过载荷传递构件与升降支腿相互作用。
[0014]
也可以避免对子部分的混凝土材料施加椭圆化力,从而降低对其造成损坏的风险。
[0015]
升降结构
[0016]
刚性框架
[0017]
升降结构的框架优选地包括围绕升降框架的中心轴线分布的多个支撑框架结构,并且每个支撑框架结构与相应的升降支腿相关联,支撑框架结构通过顶部互连结构和底部互连结构互连,每个互连结构优选地大致呈环形。这为框架提供了刚性。
[0018]
每个支撑框架结构优选地包括至少一个斜梁,该斜梁以距框架的中心轴线的距离
随着从顶部互连结构向相应的载荷传递构件向下而增大的方式倾斜地延伸。因此,施加到载荷传递构件的一些应变可以传递到顶部互连结构,这有助于限制操作中的框架的变形。
[0019]
每个支撑框架结构优选地包括在所述顶部互连结构和底部互连结构之间延伸的至少一个竖直梁,并且优选地包括从底部互连结构向竖直连接构件延伸的至少一个水平梁,所述竖直连接构件从所述斜梁与载荷传递构件的连接点处竖直延伸。
[0020]
每个支撑框架结构优选地包括从载荷传递构件向底部互连结构延伸的对角撑杆。
[0021]
每个支撑框架结构优选地关于包含相邻升降支腿的纵向轴线的中间对称平面对称。
[0022]
每个支撑框架结构优选地包括:两个斜梁,这两个斜梁以距框架的中心轴线的距离随着从顶部互连结构向至少部分地靠近相邻的升降支腿延伸的载荷传递构件向下而增大的方式倾斜地延伸;两个竖直梁,这两个竖直梁在所述顶部互连结构和底部互连结构之间延伸;两个水平梁,这两个水平梁从底部互连结构向竖直连接构件延伸,所述竖直连接构件从相邻的斜梁和载荷传递构件的连接点处竖直延伸;以及至少一个支撑构件,该至少一个支撑构件将两个竖直梁和/或两个斜梁连接。每个支撑框架结构优选地包括将两个竖直梁连接的水平撑杆。
[0023]
所有的梁都可以由钢制成并被焊接成使得框架是一体的,而不需要在现场组装。在一个变型中,框架由将在现场组装的至少两个部分组成,其中组装通过螺栓、剪切销和可能的焊接来执行。
[0024]
自爬升机构
[0025]
用于相对于升降支腿提升或降低升降框架的自爬升机构可以各自包括由至少一个可扩张结构连接的第一台和第二台。
[0026]
可扩张结构可包括至少一个千斤顶,例如液压千斤顶。
[0027]
第一台和第二台可设置有用于选择性地锚定在升降支腿上的可释放的闩锁。每个闩锁可以包括销和用于将销移动成与升降支腿的爬升导轨的相应孔接合和脱离接合的致动器。每个自动爬升机构优选地具有两个这样的销,以与两个径向相对的导轨中的孔接合。销的致动优选地是自动化的并且与台的移位同步。
[0028]
所述台之一优选地刚性连接到载荷传递构件。自爬升机构优选地位于载荷传递构件下方以在待组装塔架的升降期间推动载荷传递构件。
[0029]
夹持臂
[0030]
第一组夹持臂中的每个夹持臂可在夹持臂基本水平且径向抵靠底部互连结构的工作位置和缩回位置之间铰接。
[0031]
每个夹持臂可以在其夹持端附近铰接至支撑支柱,该支撑支柱在夹持臂处于工作位置时在所述夹持臂与固定引导元件之间对角地延伸。
[0032]
支柱可包括滑动槽,并且所述固定引导元件接合所述滑动槽,使得当夹持臂处于工作位置时,引导元件抵靠所述滑动槽的止挡件以承受支柱的应变,当夹持臂朝向其缩回位置移动时所述滑动槽相对于引导元件移动以允许所述夹持臂枢转。
[0033]
夹持臂可以在其近端铰接至安装在滑动件上的支撑件,从而允许一旦夹持臂被升高,夹持臂的近端就径向向外移动。
[0034]
优选地,该系统包括第二组夹持臂,该第二组夹持臂不同于第一组夹持臂并且被
配置为用于保持塔架的外径大于第一组夹持臂能够夹持的子部分的外径的子部分。
[0035]
第二组夹持臂中的夹持臂可以在夹持位置和缩回位置之间以滑动方式径向移动。
[0036]
第二组夹持臂优选地位于第一组夹持臂下方。
[0037]
载荷传递构件
[0038]
每个载荷传递构件可以是大致u形的,u形的分支在升降支腿的两侧上延伸。
[0039]
优选地,每个载荷传递构件包括至少一个可调节的引导装置,该引导装置被配置成接合相应升降支腿的爬升导轨以将由于塔架上的风压引起的水平载荷传递到升降支腿。
[0040]
单向支承件
[0041]
该系统可包括在待组装塔架的子部分的窗口处的单向滑动支承件,夹持臂接合在该窗口中。
[0042]
这降低了混凝土节椭圆化的风险。
[0043]
该系统可以在每个窗口中包括诸如扁千斤顶之类的机构,以用于调节夹持臂和窗口的上表面之间的距离。
[0044]
用于架设风力发电机的塔架的方法
[0045]
本发明的示例性实施方式还涉及一种用于架设风力发电机的塔架的方法,该方法包括用优选如上所述的系统提升待组装塔架的(一个或多个)子部分,所述系统包括:
[0046]-多个升降支腿,
[0047]-可在升降支腿上竖直移动的升降结构,所述升降结构包括用于保持待组装塔架的刚性升降框架,所述升降框架包括载荷传递构件,并且所述升降结构优选地包括在载荷传递构件和升降支腿之间相互作用以用于提升或降低升降结构的自爬升机构,
[0048]-可相对于升降框架在缩回配置和夹持配置之间移动且被配置为用于接合塔架的子部分的至少第一组夹持臂,
[0049]
在该方法中,水平载荷从升降结构或塔架到升降支腿的传递仅通过载荷传递构件发生。
[0050]
换句话说,本发明的示例性实施方式还涉及一种用于架设风力发电机的塔架的方法,该方法包括用优选如上所述的系统提升待组装塔架的(一个或多个)子部分,所述系统包括:
[0051]-多个升降支腿,
[0052]-可在升降支腿上竖直移动的升降结构,所述升降结构包括用于保持待组装塔架的刚性升降框架,所述升降框架包括载荷传递构件,升降力被施加到所述载荷传递构件以升高升降结构,并且所述升降结构包括在载荷传递构件和升降支腿之间相互作用以用于提升或降低升降结构的自爬升机构,
[0053]-可相对于升降框架在缩回配置和夹持配置之间移动且被配置为用于接合塔架的子部分的至少第一组夹持臂,
[0054]
在该方法中:
[0055]-使用自爬升机构将待组装塔架的下端提升到足以在待组装塔架下方插入下一个要与该塔架的被升高的(一个或多个)子部分组装在一起的子部分的高度,
[0056]-降低升降结构,以便待组装塔架的下端可以组装到该子部分,
[0057]-使夹持臂从待组装塔架上脱离,
[0058]-降低升降结构,以使夹持臂能够接合位于待组装塔架底部的子部分。
[0059]
可以重复这个顺序直到塔架完成。
[0060]
塔架可以具有超过100m的高度,例如范围在120m和200m之间。子部分的高度可以在10m至20m的范围内。
[0061]
进一步的考虑
[0062]
独立地或与上文结合地,本发明的示例性实施方式还涉及一种用于组装风力发电机的塔架的系统,该塔架包括一系列子部分,该系统包括:
[0063]-多个升降支腿,
[0064]-可在升降支腿上竖直移动的升降结构,所述升降结构包括用于保持待组装塔架的升降框架,
[0065]-可相对于升降框架在缩回配置和夹持配置之间移动并且被配置为用于接合塔架的子部分的至少第一组夹持臂,
[0066]-可相对于升降框架在缩回配置和夹持配置之间移动并且被配置为用于接合塔架的直径比第一组夹持臂夹持的子部分更大的子部分的至少第二组夹持臂。
[0067]
独立地或与上文结合地,本发明的示例性实施方式还涉及一种用于组装风力发电机的塔架的系统,该塔架包括一系列子部分,该系统包括:
[0068]-多个升降支腿,
[0069]-可在升降支腿上竖直移动的升降结构,所述升降结构包括用于保持待组装塔架的升降框架,所述升降结构包括通过顶部互连结构和底部互连结构互连的支撑框架结构,优选地,支撑框架结构关于包含相邻升降支腿的纵向轴线的中间对称平面对称,优选地,支撑框架结构包括至少一个斜梁,该斜梁以距框架的中心轴线的距离随着向下而增大的方式倾斜地延伸,该斜梁优选地将顶部互连结构连接到载荷传递构件,
[0070]-可相对于升降框架在缩回配置和夹持配置之间移动并且被配置为用于接合塔架的子部分的至少第一组夹持臂。
[0071]
这些系统可以具有以上所述的系统的全部或部分其他特征。例如,这些系统可以设置也可以不设置例如以上所述的自爬升机构。
附图说明
[0072]
在附图中:
[0073]-图1是使用根据本发明的系统架设的塔架的立面示意图,
[0074]-图2示出了图1的细节,
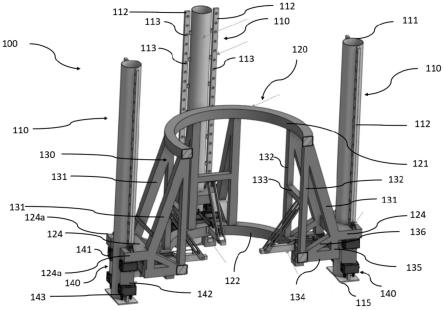
[0075]-图3是根据本发明的系统的实施方式的局部示意性透视图,
[0076]-图4a至图4c示出了自爬升机构的操作,
[0077]-图5示出了用于小直径的子部分的夹持臂的部署,
[0078]-图6示出了从不同观察点看的夹持臂,
[0079]-图7示出了缩回时的图5的夹持臂,
[0080]-图8示出了完全缩回的夹持臂,
[0081]-图9示出了用于大直径的子部分的夹持臂的部署,
[0082]-图10示出了载荷传递构件的可调节的引导装置,
[0083]-图11是系统的变型实施方式的局部透视图,
[0084]-图12是接合在子部分的窗口中的夹持臂的示意性局部截面图,以及
[0085]-图13是用于相对于支腿固定自爬升机构的台的闩锁机构的示意图。
具体实施方式
[0086]
图1示出了可以根据本发明架设的风力涡轮机塔架1的示例。
[0087]
塔架1包括沿塔架的纵向轴线z竖直地组装的多个节10。
[0088]
通过环形端部元件11,风力涡轮机t被固定在塔架1的顶部上。
[0089]
每个节10是环形的并且由区段12组成,区段12优选是弧形的(如图中所示)并且由预制混凝土制成。
[0090]
塔架1可以包括:
[0091]-具有扩大的外径d的基部的截头圆锥形的第一部分2,该截头圆锥形的第一部分由沿着塔架的纵向轴线z彼此轴向对准的多个环形节组成,
[0092]-具有恒定直径c的圆柱形的第二部分3,该第二部分由彼此轴向对准的多个环形节组成,该第二部分的下端置于截头圆锥形的第一部分2的上侧端部上,
[0093]-具有扩大的基部的截头圆锥形的第三部分4,该基部置于第二部分3的顶部,该第三部分由彼此轴向对准的多个环形节组成,
[0094]-圆柱形的第四部分5,第四部分置于第三部分4的顶部,第四部分的直径b小于第二部分3的直径c,该第四部分5由彼此轴向对准的多个环形节组成。
[0095]
更具体地如图2所示,使用多个子部分si来架设该塔架,每个子部分都在地面上组装,然后被放置在先前安装的子部分下方。
[0096]
每个子部分si可以由相同数量的环形节10形成,例如,如图所示,由6个节形成。
[0097]
除了底部的子部分之外的所有子部分si都设置有底部节10a,底部节10a的区段12可以包括窗口13。在所示示例中,每个子部分si有四个窗口13。
[0098]
图3示出了根据本发明的可用于架设塔架1的系统100。
[0099]
该系统100包括与每个子部分si所具有的窗口一样多的升降支腿110,即在本示例中为四个。但是,升降支腿的数量可以不同,可以为3个或多于4个。
[0100]
每个升降支腿110包括底端置于板115上的竖直柱111和沿支腿110竖直延伸的两个径向相对的爬升导轨112。这些导轨112各自设置有一系列等距孔113。柱111可以由具有圆形横截面的钢管制成,如图所示。
[0101]
在图3的示例中,升降支腿110具有独立的上端,但在一变型中,如图11所示,它们可以通过以方形构造延伸的支撑件200连接,其中,柱111位于方形的顶点处。
[0102]
系统100包括可沿升降支腿110移动的升降结构120。该升降结构120包括刚性升降框架,该刚性升降框架包括四个支撑框架结构130,每个支撑框架结构130与相应的升降支腿110相关联,这些支撑框架结构130在它们的上端通过顶部互连结构121互连并在它们的底端附近通过底部互连结构122互连。在所示示例中,这些互连结构121和122由环形梁构成,顶部互连结构121的直径与底部互连结构122的直径基本相同,顶部互连结构121和底部互连结构122两者均以升降结构120的竖直中心轴线为中心。
[0103]
升降框架包括远离每个支撑框架结构130径向延伸的u形载荷传递构件124,u形载
荷传递构件124的两个分支124a在相应的柱111的两侧延伸。
[0104]
自爬升机构140设置在每个载荷传递构件124下方以与升降支腿110相互作用,从而竖直地移动升降框架。
[0105]
每个自爬升机构140包括连接到载荷传递构件124的上台141、下台143和包括例如一个或多个液压千斤顶的可扩张结构142。
[0106]
如图13所示,每个台141和143包括可释放的闩锁,该闩锁包括销146,销146被构造成接合爬升导轨的孔113以将自爬升机构固定在支腿110上的选定位置。
[0107]
每个闩锁包括例如致动器147以移动销146与相应的孔113接合或脱离。
[0108]
销146的致动可以自动进行并且与台141和143的移位同步。
[0109]
自爬升机构140可根据图4a至图4c所示的顺序操作以提升升降框架。
[0110]
首先,下台143锁定在导轨112上,而上台141未锁定。然后,可扩张结构142被致动并且向上推动上台141,连同附接到上台141的载荷传递构件124一起向上推动。一旦上台141到达其下一个位置,如图4b所示,其闩锁就被激活以将上台141相对于导轨112固定。载荷现在可由该上台141支撑,并且下台143的闩锁可以缩回。然后,可扩张结构142可以缩回以将下台升高到其下一个位置,如图4c所示。该顺序根据需要重复多次,以沿着支腿110将升降框架升高所需的高度。
[0111]
为了降低升降框架,执行相反的顺序。
[0112]
每个支撑框架结构130包括从顶部互连结构121向底部互连结构122直立向下延伸的两个竖直梁132。这些竖直梁132通过水平撑杆133基本上在它们的中间高度处连接。
[0113]
每个支撑框架结构130包括两个斜梁131,斜梁131相对于相邻的竖直梁132以一定距离倾斜地延伸,该距离随着向下而增大。
[0114]
这些斜梁131在它们的下端连接到载荷传递构件124。
[0115]
水平梁134从底部互连结构122延伸到靠近相邻支腿110的位置,在该位置处,水平梁134通过竖直连接构件135附接到载荷传递构件。
[0116]
对角撑杆136基本上从斜梁131与载荷传递构件124的连接点处延伸到竖直梁132与水平梁134的连接点处。
[0117]
每个支撑框架构件130关于穿过相邻的支腿110的纵向竖直轴线的中间对称平面对称。
[0118]
升降结构120承载第一组的四个夹持臂150和第二组夹持臂170,第一组的四个夹持臂150被配置为用于夹持较小直径的子部分,以及第二组夹持臂170被配置为用于夹持塔架的较大直径的子部分。
[0119]
每个夹持臂150被配置为采用图3中所示的工作配置或者图9中所示的缩回配置,在工作配置中它基本上在底部互连结构122的水平上水平地且径向地延伸,在缩回配置中它完全延伸到直径为顶部互连结构121的内径的内部圆柱形体积之外。
[0120]
每个框架支撑结构130承载水平滑动件180,在水平滑动件180中承载连接到支架158的关节的支撑件可以在致动器159(例如液压千斤顶)的作用下轴向移动。支架158刚性地连接到夹持臂150。
[0121]
如图5所示,具有两个部分的支撑支柱151在夹持臂150的远端附近的152处铰接,该两个部分中的每个部分在夹持臂150的相应侧延伸,并且支撑支柱151包括滑动槽153。
[0122]
如图6所示,支撑件138固定到水平撑杆133,并且承载引导元件,例如接合在滑动槽153中的轴154。
[0123]
致动器157(例如液压千斤顶)在支撑框架结构130的固定点和固定到夹持臂150的支架156之间延伸,如图5所示。
[0124]
夹持臂150的近端设置有垫155,如图7所示。
[0125]
当夹持臂150处于工作配置时,该垫155抵靠底部互连结构122的内侧,如图5所示。这有助于夹持臂150相对于升降框架的精确定位。
[0126]
在该工作配置中,轴154抵靠由支柱151形成在滑动槽153的端部处的止挡件,并且支柱151可以承受由塔架的重量施加在夹持臂150上的机械载荷。
[0127]
为了缩回夹持臂150,致动器157缩回,这引起夹持臂150枢转,如图7所示。
[0128]
在夹持臂150枢转期间,轴154可以在滑动槽153中移动并且轴引导支柱151向上移动。
[0129]
当夹持臂150完全升起时,致动器159可被激活以将支架158拉回,如图8所示。在到达其完全缩回配置时,夹持臂150与支柱151一起完全延伸到由顶部互连结构121的内径限定的圆柱形体积之外。
[0130]
夹持臂170由在底部互连结构122下方延伸的支撑件129承载并且可以在图8所示的缩回配置和图9所示的伸出配置之间径向移动。
[0131]
每个载荷传递构件124承载可调节的引导装置,该引导装置支承在导轨112上以将水平风载荷从升降框架传递到支腿110。
[0132]
如图10所示,引导装置可包括抵靠导轨112的垫191和用于调节垫191相对于固定到载荷传递构件124的支撑件190的位置的螺杆机构。
[0133]
为了操作系统100,升降框架在支腿110上升高,并且塔架的一子部分位于升降框架下方。然后,升降框架降低并且夹持臂150或170根据子部分的外径而伸出。
[0134]
夹持臂150或170接合在子部分的相应窗口13中。
[0135]
如图12所示,每个窗口13设置有单向(方向为径向或沿夹持臂150、170的纵向轴线)滑动支承件210和211,从而避免夹持臂对子部分施加椭圆化转向力。调节机构300(例如扁千斤顶)可以竖直地插入窗口13的上表面与上支承件211之间(如图12),或相反地插入夹持臂150、170与上支承件211之间,而上支承件与窗口13的上表面接触。这种布置允许补偿间隙并在通过夹持臂150或170夹持时精确地调节塔架的竖直度。
[0136]
然后自爬升机构140被致动以将升降框架和支承在夹持臂上的子部分升高到使得下一个子部分能够插入下方的高度。
[0137]
一旦下一个子部分已经定位,由升降框架承载的子部分就可以放在其顶部上并可以与其组装在一起。一旦重量由底部的子部分支撑,夹持臂就可以缩回。
[0138]
一旦两个子部分组装好,升降框架就可以下降,并且夹持臂就可以插入底部的子部分的窗口中,以升高一系列组装好的子部分,并准备引入下一个子部分。
[0139]
重复此顺序,直到组装好最后一个子部分。
[0140]
在系统100的操作期间,夹持臂150首先用于架设塔架的具有较小外径的子部分,并且夹持臂170用于升高具有较大直径的子部分。
[0141]
由于升降框架的刚性,令人惊讶的是,相对于使用保持臂在塔架上施加水平载荷
的系统不需要固定待组装塔架。待组装塔架仅由夹持臂保持,系统不会向塔架施加任何其他载荷。
[0142]
由于升降框架的刚性,也基本上没有弯矩传递到支腿110。来自风压的水平载荷可以有效地传递到支腿110。除了夹持臂150或170之外,没有元件支承在升高的子部分的混凝土上,从而避免了对混凝土施加椭圆化约束。
[0143]
支腿110易于安装或移除,从而能够缩短安装/拆卸时间。
[0144]
当然,在不脱离本发明的范围的情况下,可以对系统进行各种修改。例如,可以改变支撑框架结构和夹持臂安装在其上的方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1