一种基于神经网络预测控制的双风轮风力机变桨控制方法
1.本发明涉及风力机控制技术领域,尤其涉及一种基于神经网络预测控制的双风轮风力机变桨控制方法。
背景技术:
2.风力发电是一种将气体流动的动能转变为电能的过程,根据目前的风力发电技术,3m/s的微风也可用于发电,应用场景广泛。双风轮风力机的前后两个风轮在运行过程中会相互影响,因此在控制过程中加入解耦补偿器,能够得到较好的控制效果。应对更加广泛的风速区是当前风力机的发展趋势。当出现风速大于25m/s的极端风况时,风力机基本都顺桨停机并断网,对风力机造成较大的载荷变动,危害风力机的使用寿命。在智能保护控制下,风力机在风速大于25m/s的一段区间内,降低风力机的功率继续运行,不仅可以拓宽可利用风速范围,还可以提高风力机发电效益。
技术实现要素:
3.本发明的目的是提出一种基于神经网络预测控制的双风轮风力机变桨控制方法,其特征在于,包括以下步骤:
4.步骤1:采集双风轮风力机控制系统极端风况下的风速、前风轮转速、后风轮转速、前风轮桨距角和后风轮桨距角数据;
5.步骤2:基于卷积神经网络对双风轮风力机极端风况下的载荷进行建模;
6.步骤3:建立双风轮风力机控制系统的双输入双输出广义预测模型并进行解耦,求解广义预测模型的输出;
7.步骤4:确定性能优化指标,利用混沌蝠鲼觅食算法对步骤3中解耦后的广义预测模型进行滚动优化,得到最优控制律与最优控制器输入。
8.所述步骤2包括以下子步骤:
9.步骤2.1:将步骤1中采集到的每项数据都按照7:3的比例划分为训练集与测试集;
10.步骤2.2:将步骤1中采集到的风速、前风轮转速、后风轮转速、前风轮桨距角和后风轮桨距角作为五维输入层构建卷积神经网络;
11.步骤2.3:在步骤2.2的五维输入层后依次构建第一卷积模块和第二卷积模块,在第二卷积模块后依次设置全连接层、dropout层和二维输出层;
12.步骤2.4:选取交叉熵函数l为目标函数,利用随机梯度下降法和训练集对卷积神经网络进行训练,再利用测试集对卷积神经网络进行测试;
13.步骤2.5:判断交叉熵函数l是否小于等于
‑
5,若是,得到以风速、前风轮转速、后风轮转速、前风轮桨距角和后风轮桨距角为输入和以前风轮叶根弯矩、后风轮叶根弯矩为输出的双风轮风力机五输入二输出模型;若否,再对卷积神经网络进行权值更新的迭代训练,直到交叉熵函数l小于等于
‑
5。
14.所述步骤2.3中的第一卷积模块和第二卷积模块均包含一个卷积层、一个激活层
和一个池化层。
15.所述步骤2.4中的交叉熵函数l为:
[0016][0017]
式中,为前后叶轮叶根弯矩的概率;为前后叶轮叶根弯矩误差。
[0018]
所述步骤3包括以下子步骤:
[0019]
步骤3.1:建立双风轮风力机控制系统双输入双输出广义预测模型如下:
[0020][0021]
式中,m1(k)、m2(k)分别为第k时刻前、后风轮叶根弯曲力矩;u1(k
‑
1)、u2(k
‑
1)分别为变桨信号的前、后风轮控制输入;ξ1(k)、ξ2(k)分别为前、后风轮干扰信号;a
11
(z
‑1)、a
22
(z
‑1)、b
11
(z
‑1)、b
12
(z
‑1)、b
21
(z
‑1)、b
22
(z
‑1)为关于z
‑1的形如的多项式,z
‑1为后移时间算子,系数与阶次均由步骤2.5中的模型得出;δ为差分算子;
[0022]
步骤3.2:对步骤3.1建立的广义预测模型进行前馈补偿解耦;引入串联补偿器b
d
(z
‑1):
[0023][0024]
得到解耦后的广义预测模型为:
[0025][0026]
步骤3.3:引入丢番图方程,求解广义预测模型的输出,其中丢番图方程为:
[0027]
1=e
i
(z
‑1)a
11
(z
‑1)δ+z
‑
i
f
i
(z
‑1)
ꢀꢀꢀ
(5)
[0028]
e
i
(z
‑1)b
11
(z
‑1)=g
i
(z
‑1)+z
‑
i
h
i
(z
‑1)
ꢀꢀꢀ
(6)
[0029]
式中,i为预测步长;e
i
(z
‑1)、f
i
(z
‑1)、g
i
(z
‑1)、h
i
(z
‑1)为关于z
‑1的多项式,系数与阶次均由迭代求解丢番图方程得出;
[0030]
得到预测模型的输出为:
[0031]
m1(k+i)=g
i
(z
‑1)δu1(k+i
‑
1)+h
i
(z
‑1)δu1(k
‑
1)+f
i
(z
‑1)m1(k)
ꢀꢀꢀ
(7)。
[0032]
所述步骤4包括以下子步骤:
[0033]
步骤4.1:确定适应度为性能优化指标:
[0034][0035]
w1(k)=m1(k)
ꢀꢀꢀ
(9)
[0036][0037]
式中,n为预测长度;w1(k)为第k时刻的参考轨迹;s1(k)为第k时刻的设定值;δu1(k)为第k时刻控制输入改变量;
[0038]
步骤4.2:设定空间维数、种群规模与最大迭代次数为初始参数初始化蝠鲼种群;
[0039]
步骤4.3:随机生成(0,1)内混沌序列初值p0,按步骤4.2的初始化蝠鲼种群规模生成tent混沌序列并将tent混沌序列附加到初始化蝠鲼种群的个体上,再结合步骤4.1得出初始化蝠鲼种群中个体的适应度;其中,tent混沌序列的生成公式为:
[0040][0041]
式中,p
d
为第d个混沌序列值;
[0042]
将tent混沌序列附加到初始化蝠鲼种群的个体上的方法为:
[0043][0044][0045]
式中,是第j维第d个体,j的位置表示空间维度,d的位置表示种群规模;为初始种群、第d个体在j维上的值;
[0046]
步骤4.4:在[0,1]中生成一个随机数rand来判断觅食行为,若rand≥0.5,转到步骤4.5;若rand<0.5,转到步骤4.6;
[0047]
步骤4.5:执行链式觅食更新方式,更新后的种群再计算新个体适应度,若新个体适应度小于原个体适应度,则新个体替换原个体,否则保留原个体,再转到步骤4.7;其中链式觅食更新公式为:
[0048][0049]
式中,为第t代、第j个体在d维上的值;为第t代在d维上最优个体的值;n为个体数量;r为[0,1]上均匀分布的随机数;
[0050]
步骤4.6:执行螺旋觅食更新方式,更新后的种群再计算新个体适应度,若新个体适应度小于原个体适应度,则新个体替换原个体,否则保留原个体,再转到步骤4.7;其中螺
旋觅食更新公式为:
[0051]
当t/t<rand时:
[0052][0053]
式中,t为最大迭代次数;ux
d
、lx
d
为第t代在d维上取值的上、下界;
[0054]
当t/t≥rand时:
[0055][0056]
步骤4.7:判断是否到达最大迭代次数,若是,则得到最优控制律与控制器的输入;若否,则转到步骤4.4;其中,最优控制律为:
[0057][0058]
式中,为最优个体在第n维的值;
[0059]
控制器的输入为:
[0060]
u(k)=u(k
‑
1)+δu(k)
ꢀꢀꢀ
(18)
[0061]
式中,δu(k)为控制律的第一个分量。
[0062]
本发明的有益效果在于:
[0063]
1、在智能保护控制中,采用了风况识别模块与载荷计算模块的冗余设置,大大提高了保护控制系统的可靠性;
[0064]
2、使用了卷积神经网络模型对双风轮风力机在极端风况下的载荷状况进行建模,其局部连接、权值共享的特点大幅降低了网络复杂性;
[0065]
3、对控制模型进行解耦使得后续参数调整简便灵活;
[0066]
4、使用了广义预测控制,对危险情形有预警功能;
[0067]
5、采用混沌蝠鲼优化算法,避免陷入局部最优,寻优能力强,收敛快。
附图说明
[0068]
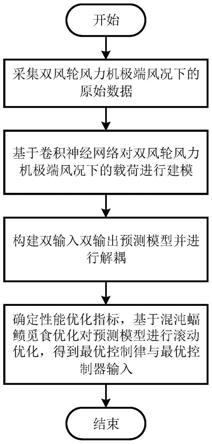
图1是本发明提供的一种基于神经网络预测控制的双风轮风力机变桨控制方法的流程图;
[0069]
图2是本发明提供的一种基于卷积神经网络对双风轮风力机极端风况下的载荷进行建模的流程图;
[0070]
图3是本发明提供的一种基于混沌蝠鲼觅食优化对预测模型进行滚动优化的流程图;
[0071]
图4是本发明提供的一种在风力机主控系统上增加智能保护控制的分层控制架构图。
具体实施方式
[0072]
本发明提出一种基于神经网络预测控制的双风轮风力机变桨控制方法,下面结合附图和具体实施例对本发明做进一步说明。
[0073]
图1是本发明提供的一种基于神经网络预测控制的双风轮风力机变桨控制方法的流程图。构建控制方法包括以下步骤:
[0074]
步骤1、采集来自双风轮风力机控制系统极端风况下的原始数据:风速、前后风轮转速、前后风轮桨距角;
[0075]
步骤2、基于卷积神经网络对双风轮风力机极端风况下的载荷进行建模;
[0076]
步骤3、构建双输入双输出预测模型并进行解耦;
[0077]
步骤4、确定性能优化指标,基于混沌蝠鲼觅食优化对预测模型进行滚动优化,得到最优控制律与最优控制器输入。
[0078]
图2是本发明提供的一种基于卷积神经网络对双风轮风力机极端风况下的载荷进行建模的流程图。步骤2中基于卷积神经网络对双风轮风力机极端风况下的载荷进行建模包括:
[0079]
步骤2.1:将步骤1中采集到的数据,按照7:3的比例划分训练集与测试集;
[0080]
步骤2.2:构建卷积神经网络结构:将步骤1中采集到的风速、前后风轮转速、前后风轮桨距角数据作为五维输入层;构建两个卷积模块,每个卷积模块包含一个卷积层、一个激活层和一个池化层;设置全连接层进行预测;设置dropout层防止过拟合;设置二维输出层表征前后风轮叶根载荷。
[0081]
步骤2.3:以交叉熵函数为目标函数,采用随机梯度下降,利用训练集进行卷积神经网络的训练,利用测试集进行卷积神经网络的测试,其中交叉熵函数l:
[0082][0083]
式中,为前后叶轮叶根弯矩的概率;为前后叶轮叶根弯矩误差。
[0084]
步骤2.4:重复步骤2.3,对卷积神经网络模型进行迭代训练,最终得到以风速、前后风轮转速、前后风轮桨距角为输入和以前后风轮叶根弯矩为输出的双风轮风力机五输入二输出模型。
[0085]
步骤3中构建双输入双输出预测模型并进行解耦包括:
[0086]
步骤3.1:双输入双输出预测模型:
[0087][0088]
式中,m1(k)、m2(k)为第k时刻前后风轮叶根弯曲力矩;u1(k
‑
1)、u2(k
‑
1)为前后风轮控制输入(变桨信号);ξ1(k)、ξ2(k)为前后风轮干扰信号;a
11
(z
‑1)、a
22
(z
‑1)、b
11
(z
‑1)、b
12
(z
‑1)、b
21
(z
‑1)、b
22
(z
‑1)为关于z
‑1的多项式,z
‑1为后移时间算子,其形如系数与阶次均由步骤2.4中的模型得出;δ为
差分算子;
[0089]
步骤3.2:对广义预测控制模型进行前馈补偿解耦设计,引入串联补偿器b
d
(z
‑1):
[0090][0091]
解耦后的广义预测模型为:
[0092][0093]
步骤3.3:引入丢番图方程,求解预测模型的输出,其中丢番图方程为:
[0094]
1=e
i
(z
‑1)a
11
(z
‑1)δ+z
‑
i
f
i
(z
‑1)
ꢀꢀꢀ
(5)
[0095]
e
i
(z
‑1)b
11
(z
‑1)=g
i
(z
‑1)+z
‑
i
h
i
(z
‑1)
ꢀꢀꢀ
(6)
[0096]
式中,i为预测步长;e
i
(z
‑1)、f
i
(z
‑1)、g
i
(z
‑1)、h
i
(z
‑1)为关于z
‑1的多项式,系数与阶次均由迭代求解丢番图方称得出。
[0097]
解得预测模型的输出为:
[0098]
m1(k+i)=g
i
δu1(k+i
‑
1)+h
i
δu1(k
‑
1)+f
i
m1(k)
ꢀꢀꢀ
(7)
[0099]
同理也可得出后叶轮叶根弯矩。
[0100]
图3是本发明提供的一种基于混沌蝠鲼觅食优化对预测模型进行滚动优化的流程图。步骤4中确定性能优化指标,基于混沌蝠鲼觅食优化对预测模型进行滚动优化,得到最优控制律与最优控制器输入,达到预期的控制效果包括:
[0101]
步骤4.1:确定性能优化指标,即适应度:
[0102][0103]
w1(k)=m1(k)
ꢀꢀꢀ
(9)
[0104][0105]
式中,n为预测长度;w1(k)为第k时刻的参考轨迹;s1(k)为第k时刻的设定值;δu1(k)为第k时刻控制输入改变量。
[0106]
步骤4.2:设定蝠鲼初始参数:空间维数、种群规模与最大迭代次数,初始化蝠鲼种群;
[0107]
步骤4.3:生成tent混沌序列:
[0108][0109]
式中,p
d
为第d个混沌序列值。
[0110]
随机生成(0,1)内的初值p0,根据上式进行迭代,依据初始化蝠鲼种群规模生成相应的tent混沌序列,并将tent混沌序列附加到初始化的蝠鲼种群中:
[0111][0112][0113]
式中,为初始种群、第j个体在d维上的值。
[0114]
计算蝠鲼种群中个体的适应度;
[0115]
步骤4.4:判断觅食行为,在[0,1]中生成一个随机数rand,当rand≥0.5时,执行步骤4.5链式觅食,否则执行步骤4.6螺旋觅食;
[0116]
步骤4.5:链式觅食更新方式:
[0117][0118]
式中,为第t代、第j个体在d维上的值;为第t代在d维上最优个体的值;n为个体数量;r为[0,1]上均匀分布的随机数;
[0119]
更新后的种群计算新个体适应度,新个体的适应度小于原个体,则新个体替换原个体,否则保留原个体;
[0120]
步骤4.6:螺旋觅食更新方式:
[0121]
当t/t<rand时:
[0122][0123]
式中,t为最大迭代次数;ux
d
、lx
d
为第t代在d维上取值的上、下界。
[0124]
更新后的种群计算新个体适应度,新个体的适应度小于原个体,则新个体替换原个体,否则保留原个体;
[0125]
当t/t≥rand时:
[0126][0127]
更新后的种群计算新个体适应度,新个体的适应度小于原个体,则新个体替换原个体,否则保留原个体;
[0128]
步骤4.7:重复步骤4.4到步骤4.6,最终得到最优控制律,最终得到最优控制律:
[0129][0130]
步骤4.8:取控制律的第一个分量为δu(k),控制器的输入u(k)为:
[0131]
u(k)=u(k
‑
1)+δu(k)
ꢀꢀꢀ
(18)
[0132]
图4是本发明提供的一种在风力机主控系统上增加智能保护控制的分层控制架构图。构建控制策略层级架构包括:保持传统风力机主控系统的基础上,增加极端风况下的智能保护控制,从风力机控制系统和激光雷达中获取数据,通过风况识别模块与载荷计算模块,分别对风力机运行状态进行判断。当有一个模块判断为极端风况时,触发智能保护控制逻辑,将指令反馈回主控系统,且指令优先级高于主控系统。
[0133]
此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1