多气缸内燃机的点火正时控制装置及点火正时控制方法与流程
1.本公开涉及进行部分气缸运转的多气缸内燃机的点火正时控制装置及点火正时控制方法。
背景技术:
2.如在日本特开2001-182601号公报中所见,已知有进行在所有气缸中进行燃烧的全气缸运转和在一部分气缸中使燃烧休止并且在剩余气缸中进行燃烧的部分气缸运转的多气缸内燃机。
技术实现要素:
3.发明所要解决的课题
4.在车载用等内燃机中,多使用设置在气缸体等的爆震传感器来检测因爆震产生的振动,并基于其检测结果来进行爆震控制。在该爆震控制中,在能够抑制爆震的范围内将点火正时向提前侧操作。并且,通过将爆震控制下的点火正时的向提前侧的操作量作为爆震学习值进行学习,提高了爆震控制的响应性。
5.另一方面,在部分气缸运转时会从使燃烧休止的气缸产生不同于进行燃烧时的振动。存在因爆震传感器拾取该振动而做出错误的爆震判定的情况。并且,有可能基于部分气缸运转中的错误的爆震判定的爆震控制的结果被反映在爆震学习值中,从而爆震学习值的学习精度降低。
6.用于解决课题的技术方案
7.本公开的一技术方案的多气缸内燃机构成为进行全气缸运转和部分气缸运转,所述全气缸运转是在所有气缸中进行燃烧的运转,所述部分气缸运转是使一部分气缸的燃烧休止并在剩余气缸中进行燃烧的运转,多气缸内燃机的点火正时控制装置构成为执行以下处理:设定爆震控制量和爆震学习值作为用于在能够抑制爆震的范围内使点火正时提前的点火正时的操作量的处理;爆震判定处理,基于爆震传感器的输出信号来判定是否发生了爆震;反馈修正处理,在判定为发生了爆震的情况下,向使点火正时的向提前侧的操作量变小的一侧更新爆震控制量的值,另一方面,在判定为没有发生爆震的情况下,向使点火正时的向提前侧的操作量变大的一侧更新爆震控制量的值;学习处理,以使得爆震学习值逐渐接近爆震控制操作量的方式更新爆震学习值的值,所述爆震控制操作量为基于爆震控制量和爆震学习值的点火正时的向提前侧的操作量;操作处理,基于爆震控制量和爆震学习值来操作各气缸的点火正时;以及以使得在部分气缸运转时,与全气缸运转时相比,爆震学习值相对于爆震控制操作量的追随性变低的方式,限制爆震学习值的更新的处理。
8.本公开的一技术方案的多气缸内燃机构成为进行全气缸运转和部分气缸运转,所述全气缸运转是在所有气缸中进行燃烧的运转,所述部分气缸运转是使一部分气缸的燃烧休止并在剩余气缸中进行燃烧的运转,多气缸内燃机的点火正时控制方法包括:设定爆震控制量和爆震学习值作为用于在能够抑制爆震的范围内使点火正时提前的点火正时的操
作量;基于爆震传感器的输出信号来判定是否发生了爆震;在判定为发生了爆震的情况下,向使点火正时的向提前侧的操作量变小的一侧更新爆震控制量的值;在判定为没有发生爆震的情况下,向使点火正时的向提前侧的操作量变大的一侧更新爆震控制量的值;以使得爆震学习值逐渐接近爆震控制操作量的方式更新爆震学习值的值,所述爆震控制操作量为基于爆震控制量和爆震学习值的点火正时的向提前侧的操作量;基于爆震控制量和爆震学习值来操作各气缸的点火正时;以及以使得在部分气缸运转时,与全气缸运转时相比,爆震学习值相对于爆震控制操作量的追随性变低的方式限制爆震学习值的更新。
附图说明
9.图1是示意性地示出第1实施方式的多气缸内燃机的点火正时控制装置的构成的图。
10.图2是在应用了图1的点火正时控制装置的混合动力车辆中执行的过滤器再生控制的流程图。
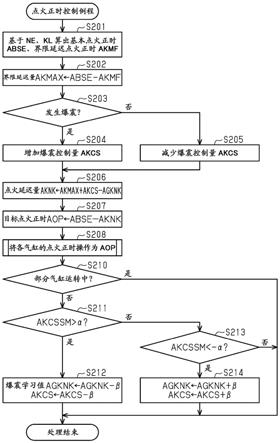
11.图3是图1的点火正时控制装置执行的点火正时控制例程的流程图。
12.图4是示出第2实施方式的多气缸内燃机的点火正时控制装置执行的点火正时控制例程的处理的一部分的流程图。
具体实施方式
13.(第1实施方式)
14.以下,参照图1~图3对多气缸内燃机的点火正时控制装置的第1实施方式进行说明。
15.《实施方式的构成》
16.首先,参照图1,对本实施方式的点火正时控制装置的构成进行说明。本实施方式的点火正时控制装置搭载于混合动力车辆10。混合动力车辆10具备多气缸内燃机11和两个发电电动机mg1、mg2作为驱动源。多气缸内燃机11以及两个发电电动机mg1、mg2经由动力分配机构12与驱动轮13机械地连接。另外,两个发电电动机mg1、mg2经由变换器14与蓄电池15电连接。并且,在各发电电动机mg1、mg2与蓄电池15之间授受的电力的量由变换器14调整。发电电动机mg1、mg2作为接受来自蓄电池15的电力的供给而产生动力的电动机发挥功能,另一方面,也作为接受来自外部的动力而进行发电的发电机发挥功能。在本实施方式中,这样的发电电动机mg1、mg2对应于电动机。
17.多气缸内燃机11具备多个气缸20、向多个气缸20导入进气的导入路即进气通路21、以及排出来自多个气缸20的排气的排出路即排气通路22。在进气通路21设置有节气门23。另外,在排气通路22设置有排气净化用的催化剂装置24。催化剂装置24兼具将排气的有害成分氧化/还原而净化的功能、和作为捕集排气中的微粒物质的过滤器的功能。而且,在多气缸内燃机11中,在每个气缸20设置有向被导入到气缸20的进气中喷射燃料的喷射器25。另外,在各气缸20设置有通过火花放电对被导入到气缸20的进气和燃料的混合气进行点火的点火装置26。
18.在混合动力车辆10搭载有电子控制单元30。电子控制单元30具备运算处理电路31和存储器32。在存储器32预先存储有用于混合动力车辆10的控制的程序、数据。向电子控制
单元30输入空气流量计33、曲轴角传感器34、爆震传感器35、催化剂温度传感器36、压差传感器37、加速器操作量传感器38、车速传感器39等用于检测混合动力车辆10的运转状况的各种传感器的输出信号。空气流量计33是检测在多气缸内燃机11的进气通路21流动的进气的流量即吸入空气量ga的传感器。曲轴角传感器34是检测多气缸内燃机11的输出轴即曲轴的旋转角(所谓的曲轴角)的传感器。电子控制单元30根据曲轴角传感器34的输出信号求出曲轴的每单位时间的旋转圈数即发动机转速ne。爆震传感器35是用于检测与多气缸内燃机11的爆震相伴的振动的传感器,安装于多气缸内燃机11的气缸体。催化剂温度传感器36是用于检测设置于催化剂装置24的内部的催化剂载体的温度即催化剂温度tc的传感器。压差传感器37是用于检测“向催化剂装置24流入时”与“从该催化剂装置24流出时”的排气的压力差即催化剂前后压差的传感器。加速器操作量传感器38是检测驾驶员的加速器踏板的踩踏量等、即加速器操作量的传感器。车速传感器39是检测混合动力车辆10的行驶速度即车速的传感器。
19.电子控制单元30,通过运算处理电路31基于上述传感器的输出信号,执行从存储器32读取的程序,来执行混合动力车辆10的各种控制。例如,电子控制单元30通过操作节气门23的开度、喷射器25的燃料喷射量、点火装置26的点火正时等,来控制多气缸内燃机11的运转状态。另外,电子控制单元30通过变换器14的操作来调整发电电动机mg1、mg2与蓄电池15之间的电力的授受量,从而控制各发电电动机mg1、mg2的动力运行转矩/再生转矩。
20.《过滤器再生控制》
21.如上所述,多气缸内燃机11的催化剂装置24具备捕集排气中的微粒物质的过滤器功能。在这样的催化剂装置24中,有可能捕集到的微粒物质逐渐堆积,并最终使催化剂装置24发生堵塞。电子控制单元30进行用于在发生堵塞之前去除堆积于催化剂装置24的微粒物质的过滤器再生控制。
22.电子控制单元30,在多气缸内燃机11的运转过程中,基于压差传感器37的输出信号来算出堆积于催化剂装置24的微粒物质的量即pm堆积量dpm。然后,电子控制单元30以pm堆积量dpm超过既定的堵塞判定值d1且催化剂温度tc低于既定的升温开始温度t0为条件,执行用于将堆积于催化剂装置24的微粒物质以燃烧的方式净化的过滤器再生控制。此外,堵塞判定值d1设定为从催化剂装置24成为了发生堵塞的状态时的pm堆积量dpm减去余裕量而得的量。
23.图2示出电子控制单元30执行的过滤器再生控制的处理的流程。电子控制单元30根据过滤器再生控制的执行条件的成立,开始图2所示的一系列的处理。
24.当开始过滤器再生控制时,首先,电子控制单元30,在步骤s101中,开始使一部分气缸20的燃烧休止并在剩余气缸20中进行燃烧的部分气缸运转。在以下的说明中,在部分气缸运转中,将使燃烧休止的气缸20记载为休止气缸,将进行燃烧的气缸记载为燃烧气缸。在部分气缸运转中,停止对休止气缸的燃料喷射、和休止气缸中的点火。此外,在该时间点,休止气缸的数量被设为1个气缸。在多气缸内燃机11中,在过滤器再生控制的执行条件没有成立的情况下,基本上进行在所有气缸20中进行燃烧的全气缸运转。接着,电子控制单元30使对燃烧气缸的燃料喷射量增加,将在燃烧气缸中进行燃烧的混合气的空燃比设为比理论空燃比靠浓侧的空燃比(s102)。在以下的说明中,将此时的燃烧气缸的空燃比记载为浓空燃比。
25.并且,电子控制单元30,在开始部分气缸运转的同时,开始利用发电电动机mg1、mg2的输出来补充因部分气缸运转中的休止气缸的燃烧休止引起的驱动力的降低量的动力补充控制。在动力补充控制时,首先,电子控制单元30运算因休止气缸中的燃烧休止引起的多气缸内燃机11的输出转矩的降低量作为不足转矩的值。然后,电子控制单元30在休止气缸处于膨胀行程的期间,使发电电动机mg2的转矩增加与“不足转矩的值”相当的量。另外,在动力补充控制中,电子控制单元30运算因部分气缸运转中的燃烧气缸中的空燃比的浓化引起的输出转矩的增加量作为剩余转矩的值。然后,电子控制单元30在燃烧气缸迎来膨胀行程的期间,为了抵消与“剩余转矩的值”相当的量的转矩,使发电电动机mg1的发电量增加。
26.在部分气缸运转中,由于“与休止气缸的燃烧休止相应的转矩降低”和“伴随于空燃比的浓化的燃烧气缸的燃烧转矩的增加”,多气缸内燃机11的输出转矩的变动变大。若因这样的部分气缸运转引起的多气缸内燃机11的输出转矩变动的增大就这样反映在驱动力的变动中,则混合动力车辆10的驾驶性能大幅降低。与此相对,在本实施方式中,电子控制单元30通过动力补充控制而利用发电电动机mg2来补充因燃烧休止引起的转矩的降低量,并且将因空燃比的浓化引起的燃烧气缸的燃烧转矩的增加量转移到发电电动机mg1的发电来进行抵消。由此,部分气缸运转中的混合动力车辆10的驾驶性能的恶化被抑制。
27.当开始部分气缸运转时,从燃烧气缸向排气通路22排出包含未燃的燃料成分的排气,从休止气缸向排气通路22排出新气。然后,在催化剂装置24中,从燃烧气缸排出的排气中的未燃的燃料成分被从休止气缸排出的新气中的氧氧化,因伴随于该氧化反应的发热而催化剂温度tc上升。之后,当催化剂温度tc成为既定的可再生温度t1以上时(s104:是),电子控制单元30将燃烧气缸的空燃比变更为比理论空燃比靠浓侧且比上述浓空燃比靠稀侧的空燃比即弱浓空燃比(s105)。此外,可再生温度t1设定为成为了“堆积于催化剂装置24的微粒物质达到燃烧温度”这一状态时的催化剂温度tc。当催化剂温度tc成为可再生温度t1以上时,在催化剂装置24中,除未燃的燃料成分以外,堆积于内部的微粒物质也氧化。因此,若虽然催化剂温度tc超过可再生温度t1,但仍将燃烧气缸的空燃比维持为浓空燃比,则催化剂温度tc有可能过度地上升。因此,在本实施方式中,电子控制单元30在催化剂温度tc成为可再生温度t1以上时,将燃烧气缸的空燃比变更为弱浓空燃比。由此,向催化剂装置24流入的未燃的燃料成分的量减少,能够抑制催化剂温度tc的过度的上升。
28.之后,当催化剂温度tc进一步成为比上述可再生温度t1高的再生促进温度t2以上时(s106:是),电子控制单元30使部分气缸运转中的休止气缸的数量从1个气缸增加为2个气缸。当休止气缸数增加时,向催化剂装置24供给的氧的量增加。结果,促进了未完全燃烧而残留于催化剂装置24内的未燃的燃料成分的氧化,因基于该氧化反应的发热,催化剂装置24中的微粒物质的燃烧净化也被促进。
29.此外,当休止气缸数增加时,向催化剂装置24流入的排气的平均温度降低。因此,当残留于催化剂装置24内的未燃的燃料成分燃尽时,催化剂温度tc降低。电子控制单元30在催化剂温度tc降低至小于既定的升温开始温度t0时(s108:是),再次执行步骤s101~s107的处理。此外,将升温开始温度t0设定为比可再生温度t1低的温度。
30.另一方面,在通过步骤s101~s107的处理而使得pm堆积量dpm减少至小于既定的再生完成判定值d0的情况下(s109:是),电子控制单元30通过在步骤s110和步骤s111中结
束部分气缸运转和动力补充控制,从而完成本次的过滤器再生控制。此外,将再生完成判定值d0设定为比堵塞判定值d1少的量。
31.《点火正时控制》
32.电子控制单元30在多气缸内燃机11的运转中,进行各气缸20的点火装置26进行混合气的点火的时期的控制、即进行点火正时的控制。在本实施方式中,进行多气缸内燃机11的点火正时的控制的电子控制单元30对应于点火正时控制装置。以下,对本实施方式的点火正时控制装置中的点火正时控制的详情进行说明。
33.图3是电子控制单元30执行的点火正时控制例程的流程图。电子控制单元30在多气缸内燃机11的运转中按照每既定的控制周期反复执行本例程的处理。此外,点火正时由以压缩上止点为基准的向提前侧的曲轴角来表示。即,点火正时越比压缩上止点靠提前侧,则表示点火正时的值越大。
34.当开始本例程时,首先,在步骤s201中,基于发动机转速ne、和发动机负荷率kl算出基本点火正时abse、和界限延迟点火正时akmf。发动机负荷率kl表示气缸20的进气的填充率,其值根据吸入空气量ga的检测结果等来求出。此外,基本点火正时abse表示最佳点火正时和爆震界限点火正时中的更靠延迟侧的正时。最佳点火正时是多气缸内燃机11的转矩的产生效率变得最大的点火正时。另外,爆震界限点火正时表示已确认会发生爆震的点火正时的范围的延迟侧的界限值。另一方面,界限延迟点火正时akmf表示已确认即使在容易发生爆震的条件下也不会发生爆震的点火正时的范围的提前侧的界限值。在改善燃烧消费率方面,作为最终设定的点火正时即目标点火正时aop,设定为尽可能接近基本点火正时abse的正时是有利的。另一方面,即使将目标点火正时aop设定为比界限延迟点火正时akmf靠延迟侧的正时,在抑制爆震方面也没有意义。因此,在点火正时控制中,将目标点火正时aop控制在从界限延迟点火正时akmf到基本点火正时abse的范围内。
35.在接下来的步骤s202中,将从基本点火正时abse减去界限延迟点火正时akmf而得到的差设定为界限延迟量akmax的值。界限延迟量akmax是点火正时控制中的目标点火正时aop相对于基本点火正时abse的延迟量的上限值。
36.在下一步骤s203中,基于爆震传感器35的输出信号,进行判定是否发生了爆震的爆震判定。在该爆震判定中判定为发生了爆震的情况下(s203:是),使处理进入步骤s204。然后,在该步骤s204中,使爆震控制量akcs的值增加,然后使处理进入步骤s206。另一方面,在爆震判定中判定为没有发生爆震的情况下(s203:否),使处理进入步骤s205。然后,在该步骤s205中,使爆震控制量akcs的值减少,然后使处理进入步骤s206。
37.爆震控制量akcs是由曲轴角表示的点火正时的操作量,是其值越大则表示点火正时的向延迟侧的操作量越大的值。由此,在爆震控制量akcs的值减少时,点火正时的向提前侧的操作量变大,在爆震控制量akcs的值增加时,点火正时的向提前侧的操作量变小。此外,在多气缸内燃机11起动时,将作为初始值的“0”设定为爆震控制量akcs的值。另外,步骤s204中的爆震控制量akcs的增加量根据检测到的爆震的强度、发生频率来设定。具体而言,爆震的强度越大、或者爆震的发生频率越高,则使爆震控制量akcs的增加量越大。另一方面,将步骤s205中的爆震控制量akcs的减少量设为常数,将其值设定为比步骤s205中的被设定为爆震控制量akcs的增加量的值的最小值小的正值。
38.当在上述步骤s204、s205中的爆震控制量akcs的增加或减少后使处理进入步骤
s206时,在该步骤s206中,算出点火延迟量aknk。点火延迟量aknk的算出通过对界限延迟量akmax加上爆震控制量akcs,然后减去爆震学习值agknk来进行(aknk
←
akmax+akcs-agknk)。点火延迟量aknk表示从基本点火正时abse起的点火正时的延迟量。另外,在该算出中使用的爆震学习值agknk是由曲轴角表示的点火正时的操作量,是其值越大则表示点火正时的向提前侧的操作量越大的值。爆震学习值agknk的值在电子控制单元30的工作停止期间中也保持于存储器32,在电子控制单元30的下一次起动时被继承。此外,在混合动力车辆10出厂时,将“0”设定为爆震学习值agknk的初始值。
39.然后,在步骤s207中,将从基本点火正时abse延迟与“点火延迟量aknk的值”相当的量的延迟侧的正时设定为目标点火正时aop的值(aop
←
abse-aknk)。然后,电子控制单元30在接下来的步骤s208中,以在步骤s207中设定的目标点火正时aop下进行点火的方式,操作各气缸20的点火装置26,然后使处理进入步骤s210。
40.在点火正时控制例程中的步骤s210以后的处理中,进行更新上述的爆震学习值agknk的值的学习处理。在步骤s210中,判定是否处于部分气缸运转期间中。然后,若处于部分气缸运转期间中(s210:是),则原样地结束本次的控制周期中的本例程的处理。即,在该情况下,在本次的控制周期中,不更新爆震学习值agknk的值,而是维持上一次控制周期的值。
41.另一方面,在不处于部分气缸运转期间中的情况下(s210:否),即在全气缸运转期间中的情况下,使处理进入步骤s211。在该步骤s211中,判定爆震控制量akcs的渐变值akcssm是否比既定的正值“α”大。渐变值akcssm是对爆震控制量akcs实施使其增减速度钝化的处理而得到的值,在本实施方式中,使用爆震控制量akcs的移动平均值作为渐变值akcssm的值。
42.在上述步骤s211中判定为渐变值akcssm比“α”大的情况下(是),使处理进入步骤s212。然后,在该步骤s212中,电子控制单元30使爆震学习值agknk的值减少既定的更新量β,并且使爆震控制量akcs的值也同样减少更新量β,然后结束本次的控制周期中的本例程的处理。
43.另一方面,在步骤s211中判定为渐变值akcssm为“α”以下的情况下(否),使处理进入步骤s213。然后,在步骤s213中,判定渐变值akcssm是否比
“‑
α”小。在渐变值akcssm比
“‑
α”小的情况下(是),使处理进入步骤s214。然后,在该步骤s214中,电子控制单元30使爆震学习值agknk的值增加更新量β,并且使爆震控制量akcs的值也同样增加更新量β,然后结束本次的控制周期中的本例程的处理。
44.此外,在步骤s213中判定为渐变值akcssm为
“‑
α”以上的情况下(否),即在渐变值akcssm为
“‑
α”以上且为“α”以下的值的情况下,原样地结束本次的本例程的处理。在该情况下,在本次的控制周期中,不更新爆震学习值agknk的值,而是维持上一次的控制周期的值。
45.此外,在本实施方式中,“点火正时控制例程中的步骤s203的处理”对应于“基于爆震传感器35的输出信号来判定是否发生了爆震的爆震判定处理”。另外,“步骤s203~s205的处理”对应于“在爆震判定中判定为发生了爆震的情况下,向使点火正时的向提前侧的操作量变小的一侧更新爆震控制量akcs的值,另一方面,在判定为没有发生爆震的情况下,向使点火正时的向提前侧的操作量变大的一侧更新爆震控制量akcs的值的反馈修正处理”。并且,“步骤s206~s208的处理”对应于“基于爆震控制量akcs和爆震学习值agknk来操作各
气缸的点火正时的操作处理”。并且,“步骤s210~s214的处理”对应于“以逐渐接近爆震控制操作量的方式更新爆震学习值agknk的值的学习处理”。
46.《第1实施方式的作用、效果》
47.在本实施方式中,电子控制单元30基于检测多气缸内燃机11的气缸体的振动的爆震传感器35的输出信号来进行判定是否发生了爆震的爆震判定。然后,电子控制单元30通过基于该爆震判定的结果的爆震控制量akcs及爆震学习值agknk的值的更新,来进行在能够抑制爆震的范围内使目标点火正时aop提前的点火正时的爆震控制。
48.在以下的说明中,将在这样的爆震控制中,基于爆震控制量akcs及爆震学习值agknk的点火正时的向提前侧的操作量记载为爆震控制操作量。如上述那样,将爆震控制量akcs的值设定为,在将点火正时向延迟侧操作的值时取正值,在将点火正时向提前侧操作的值时取负值。另一方面,爆震学习值agknk的值设定为,在将点火正时向提前侧操作的值时取正值,在将点火正时向延迟侧操作的值时取负值。由此,在本实施方式的情况下,从爆震学习值agknk的值减去爆震控制量akcs的值而得到的差(=agknk-akcs)成为爆震控制操作量的值。
49.在通过爆震判定判定为没有发生爆震的情况下,将爆震控制量akcs的值向值减少的一侧、即点火正时的向提前侧的操作量变大的一侧更新。另外,在通过爆震判定判定为发生了爆震的情况下,将爆震控制量akcs的值向值增加的一侧、即点火正时的向提前侧的操作量变小的一侧更新。然后,通过基于这样的爆震判定的结果的爆震控制量akcs的值的更新,进行用于在抑制爆震的范围内使点火正时提前的点火正时的反馈修正。
50.在没有进行部分气缸运转时,即在全气缸运转时,在爆震控制量akcs的渐变值akcssm的绝对值超过“α”的情况下,以在维持爆震控制操作量的值的状态下,使爆震控制量akcs的绝对值变小的方式更新爆震学习值agknk的值。即,在全气缸运转时,以逐渐接近爆震控制操作量的方式进行爆震学习值agknk的值的更新。并且,由此,在将基本点火正时abse设为点火正时的提前界限的状态下,学习“在抑制爆震的范围内点火正时成为最大限度地提前了的状态时的爆震控制操作量”来作为爆震学习值agknk的值。
51.此外,在搭载了本实施方式的点火正时控制装置的混合动力车辆10中,电子控制单元30在催化剂装置24的pm堆积量dpm超过堵塞判定值d1的情况下,执行用于将堆积于催化剂装置24的微粒物质以燃烧的方式净化,而使该催化剂装置24的微粒物质的捕集能力恢复的过滤器再生控制。在该混合动力车辆10中,电子控制单元30根据过滤器再生控制中的催化剂装置24的升温要求,进行使一部分气缸20的燃烧休止、并进行剩余气缸20的燃烧的部分气缸运转。
52.在部分气缸运转时会从使燃烧休止的气缸20产生不同于进行燃烧时的振动。并且,存在因爆震传感器35拾取该振动而即使实际上没有发生爆震也做出发生了爆震这一错误的爆震判定的情况。另外,在混合动力车辆10中,电子控制单元30在部分气缸运转时,执行利用发电电动机mg1、mg2的输出来补充因休止气缸的燃烧休止引起的驱动力的降低量的动力补充控制。在这样的动力补充控制中,反复进行发电电动机mg1、mg2的输出转矩的增减,因其反复进行而产生的振动向多气缸内燃机11传递。存在因爆震传感器35拾取由来于这样的动力补充控制的振动,而也做出错误的爆震判定的情况。并且,由于基于这样的错误的爆震判定来更新爆震控制量akcs的值,从而爆震控制操作量有可能成为不合适的值。
53.与此相对,在本实施方式中,电子控制单元30在进行部分气缸运转的情况下停止爆震学习值agknk的更新。因此,基于执行部分气缸运转及动力补充控制的期间中的错误的爆震判定的爆震控制的结果、即不合适的爆震控制操作量的值不会反映在爆震学习值agknk的值上。此外,在部分气缸运转期间中,也继续进行基于爆震判定的爆震控制量akcs的值的更新。如上述那样,在部分气缸运转中,存在即使实际上没有发生爆震,也做出发生了爆震这一错误的爆震判定的情况。这样的错误的爆震判定使得基于爆震控制的点火正时的向提前侧的操作量比本来应有的量小。由此,若在部分气缸运转期间中,也继续进行基于爆震判定的爆震控制量akcs的更新,则爆震的发生会被抑制。
54.对本实施方式的效果进行说明。
55.(1)在本实施方式中,电子控制单元30停止“进行部分气缸运转时的爆震学习值agknk的更新”。由此,部分气缸运转时的错误的爆震判定的结果不会反映在爆震学习值agknk的值上。因此,能够抑制进行部分气缸运转的多气缸内燃机11中的爆震学习值agknk的学习精度的降低。
56.(2)电子控制单元30,在部分气缸运转期间中也继续进行基于爆震判定的结果的爆震控制量akcs的更新,因此能够抑制部分气缸运转期间中的爆震的发生。
57.(第2实施方式)
58.接着,在参照图4的基础上对多气缸内燃机的点火正时控制装置的第2实施方式进行说明。在本实施方式中,对与第1实施方式共用的构成标注相同的附图标记并省略其详细的说明。此外,本实施方式的点火正时控制装置的构成是除了点火正时控制例程中的学习处理的内容不同以外,与第1实施方式同样的构成。
59.图4示出在本实施方式的点火正时控制装置中进行电子控制单元30执行的点火正时控制例程中的学习处理的部分的流程图。图4的步骤s220~s226的处理是代替图3所示的第1实施方式的点火正时控制例程中的步骤s210~s214的处理而被执行的处理。即,在本实施方式中,在图3的步骤s208的处理之后,使处理进入图4的步骤s220。
60.当使处理进入步骤s220时,在该步骤s220中判定是否处于部分气缸运转期间中。然后,在不处于部分气缸运转期间中的情况下(s220:否),即在处于全气缸运转期间中的情况下,在步骤s221中将既定的正值β1设定为更新量β的值,然后使处理进入步骤s223。与此相对,在处于部分气缸运转期间中的情况下(s220:是),在步骤s222中,将比上述值β1小的正值β2设定为更新量β的值,然后使处理进入步骤s223。
61.当使处理进入步骤s223时,在该步骤s223中,判定爆震控制量akcs的渐变值akcssm是否比“α”大。在判定为渐变值akcssm比“α”大的情况下(是),使处理进入步骤s224。然后,在该步骤s224中,电子控制单元30使爆震学习值agknk的值减少更新量β,并且使爆震控制量akcs的值也同样减少更新量β,然后结束本次的控制周期中的本例程的处理。
62.另一方面,在步骤s223中判定为渐变值akcssm为“α”以下的情况下(否),使处理进入步骤s225。然后,在步骤s225中,判定渐变值akcssm是否比
“‑
α”小。在判定为渐变值akcssm比
“‑
α”小的情况下(是),使处理进入步骤s226。然后,在该步骤s226中,电子控制单元30使爆震学习值agknk的值增加更新量β,并且使爆震控制量akcs的值也同样增加更新量β,然后结束本次的控制周期中的本例程的处理。
63.与此相对,在步骤s225中判定为渐变值akcssm为
“‑
α”以上的情况下(否),即在渐
变值akcssm为
“‑
α”以上且“α”以下的值的情况下,原样地结束本次的本例程的处理。在该情况下,在本次的控制周期中,不更新爆震学习值agknk的值,而维持上一次的控制周期的值。
64.在这样的本实施方式中,在部分气缸运转中,也继续进行爆震学习值agknk的更新。但是,在部分气缸运转时,将比在全气缸运转时设定的值β1小的值β2设定为每个控制周期的爆震学习值agknk的更新量β的值。因此,在部分气缸运转时,与全气缸运转时相比,学习处理中的爆震学习值agknk的值向接近爆震控制操作量的一侧的更新速度变小。即,在部分气缸运转时,以爆震学习值agknk相对于爆震控制操作量的追随性比全气缸运转时低的方式限制爆震学习值agknk的更新。在这样的情况下,基于部分气缸运转期间中的错误的爆震判定的爆震控制的结果也难以反映在爆震学习值agknk上。因此,在本实施方式的情况下,也能够抑制进行部分气缸运转的多气缸内燃机11中的爆震学习值的学习精度的降低。
65.这样,在本实施方式中,通过在部分气缸运转时与全气缸运转时之间变更更新量β的值,从而使部分气缸运转时的爆震学习值agknk相对于爆震控制操作量的追随性比全气缸运转时低。也可以在这样的更新量β的变更的基础上、或者代替该变更,在部分气缸运转时与全气缸运转时之间变更在步骤s223、s225的判定中使用的“α”的值。即,在部分气缸运转时,将比在全气缸运转时设定的值大的正值设定为“α”的值。通过这样的“α”的值的变更,部分气缸运转时的爆震学习值agknk相对于爆震控制操作量的追随性也比全气缸运转时降低。因此,基于部分气缸运转期间中的错误的爆震判定的爆震控制的结果难以反映在爆震学习值agknk上。
66.(其他实施方式)
67.上述实施方式能够如以下那样变更而实施。本实施方式及以下的变更例能够在技术上不矛盾的范围内互相组合来实施。
68.·
电子控制单元30不限于通过运算处理电路31和存储器32来实现。例如,电子控制单元30也可以具备通过硬件处理来执行在上述实施方式中执行的处理的至少一部分的专用的硬件电路(例如asic等)。即,电子控制单元30是具备以下的(a)~(c)中的任一构成的处理电路即可。(a)具备将上述处理的全部按照程序来执行的处理装置、和存储程序的rom等程序存储装置。(b)具备将上述处理的一部分按照程序来执行的处理装置及程序存储装置、和执行剩余的处理的专用的硬件电路。(c)具备执行上述处理的全部的专用的硬件电路。在此,具备处理装置和程序存储装置的软件执行装置、专用的硬件电路可以是多个。
69.·
也可以根据发动机转速ne等将多气缸内燃机11的运转区域划分为多个学习区域,并且对每个学习区域设定单独的爆震学习值agknk,对每个学习区域单独地进行爆震学习值agknk的学习处理。
70.·
在上述实施方式中,电子控制单元30对多气缸内燃机11的所有气缸20以统一的方式进行爆震控制。电子控制单元30也可以对多气缸内燃机11的每个气缸20单独地执行爆震控制,即也可以对每个气缸20单独地实施爆震判定处理、反馈修正处理、以及学习处理。此时,对每个气缸20单独地设定爆震控制量akcs、爆震学习值agknk,这些值的更新也对每个气缸20单独地实施。在进行这样的按照不同气缸的爆震控制的情况下,电子控制单元30,在部分气缸运转期间中,使针对燃烧气缸的爆震判定处理、反馈修正处理、以及学习处理继续,使针对休止气缸的爆震判定处理、反馈修正处理、以及学习处理停止。在这样的情况下,在部分气缸运转期间中,也有时会因从休止气缸发出的振动,在燃烧气缸的爆震判定处理
中做出错误的爆震判定,该气缸的爆震控制操作量成为不合适的值。由此,在进行按照不同气缸的爆震控制的情况下,也希望为了抑制按照不同气缸的爆震学习值agknk的学习精度的降低,而限制部分气缸运转期间中的爆震学习值agknk的更新。
71.·
在应用上述实施方式的混合动力车辆10中,电子控制单元30在执行部分气缸运转的同时执行动力补充控制。即使不执行动力补充控制,在部分气缸运转期间中,也会在休止气缸产生不同于全气缸运转时的振动,有可能因该振动而做出错误的爆震判定。由此,电子控制单元30在不伴随动力补充控制地实施部分气缸运转的情况下,也能够通过应用上述实施方式的点火正时控制,来抑制爆震学习值agknk的学习精度的降低。
72.·
此外,在不具备发电电动机mg1、mg2而仅具备多气缸内燃机11作为驱动源的车辆中,电子控制单元30虽然无法执行动力补充控制,但能够通过部分气缸运转执行过滤器再生处理。由此,即使在搭载于这样的车辆的多气缸内燃机中,在进行部分气缸运转时,也能够通过应用上述实施方式的点火正时控制,来抑制爆震学习值agknk的学习精度的降低。
73.·
部分气缸运转有时不仅根据过滤器再生处理中的升温要求,还为了促进多气缸内燃机11的冷起动时的催化剂活性而根据催化剂装置24的升温要求来进行。有时还以降低多气缸内燃机11的在低负荷区域的泵损失为目的而进行部分气缸运转。在任一情况下,在部分气缸运转期间中都可能从休止气缸产生不同于全气缸运转时的振动而做出错误的爆震判定。因此,只要是进行部分气缸运转的多气缸内燃机,通过应用上述实施方式的点火正时控制,则基于部分气缸运转期间中的错误的爆震判定的爆震控制的结果难以反映在爆震学习值agknk的值上。由此,无论部分气缸运转的目的是什么,只要是进行部分气缸运转的多气缸内燃机,通过应用上述实施方式的点火正时控制,则能够抑制爆震学习值agknk的学习精度的降低。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1