用于阀位置监测的方法和系统与流程
1.本发明总体上涉及用于内燃机的系统,并且更具体地涉及用于内燃机系统的燃料喷射器中的阀移动检测的方法和系统。
背景技术:
2.内燃机包括电子控制器,其监测和控制发动机操作的多个方面,包括燃料喷射的定时和量。为了精确地控制燃料喷射,以反映燃料喷射器的初始性能特性的方式对电子控制器进行编程,初始性能特性在发动机运行期间影响燃料喷射器的部件的响应性。该初始编程可以提供对燃料喷射参数的控制,例如定时和数量。然而,对于由于制造公差而偏离预期的初始性能特性的燃料喷射器,这种编程可能是不准确的。即使当燃料喷射器与预期的初始特性紧密匹配时,燃料喷射器的响应性也随着发动机状况的改变而改变。例如,由于燃料喷射器的磨损,燃料喷射器的性能随时间变化。为了补偿燃料喷射器性能的变化,或评估新安装的燃料喷射器的特性,一些发动机系统包括监测一个或多个电子控制的喷射器阀的位置的控制器。然而,当电流被施加以将阀驱动到特定位置时,这些控制单元可能不能检测阀的位置,并且因此可能不能执行对燃料喷射器的操作的完整分析。此外,这些电子控制器可能不能根据燃料喷射器阀到达致动位置(例如与燃料喷射相关联的位置)的实际时间来适配燃料喷射器的控制。
3.在授予yamakado等人的美国专利申请第2002/0166541a1号('541公开)中公开了一种燃料喷射器和喷射器控制电路。'541公开中描述的燃料喷射器包括产生驱动喷射器内的阀的力的控制线圈和保持线圈。信号处理电路通过在预设时间之后或在达到预设电流之后停止电流来管理用于停止或减慢电流的定时。虽然在'541公开中描述的燃料喷射器在某些情况下可能是有用的,但是它可能不能检测阀到达致动位置的实际时间。因此,'541公开中描述的燃料喷射器可能不能补偿影响燃料喷射器阀的致动的状况的变化,或者不能考虑与用于计算预设时间或电流的初始特性不同的状况。
4.所公开的系统和方法可以解决上述问题中的一个或多个和/或本领域中的其他问题。然而,本发明的范围由所附权利要求限定,而不是由解决任何具体问题的能力限定。
技术实现要素:
5.在一个方面,一种用于控制发动机系统的燃料喷射器的方法可包括:施加吸入电流以关闭燃料喷射器的溢流阀;以及检测溢流阀关闭的定时。该方法还可以包括基于检测到的溢流阀的关闭的定时来调节吸入电流的幅度、吸入电流的持续时间或吸入电流的施加的开始的定时中的至少一个。
6.在另一方面,一种用于控制发动机系统的燃料喷射器的燃料喷射方法可包括:将具有第一电流电平的电流施加到螺线管,以将阀从静止位置朝向致动位置致动,以及在将电流施加到螺线管的同时,基于第二电流电平的变化,检测阀到达致动位置的定时。该方法还可以包括基于所检测到的定时来调节吸入电流的幅度、吸入电流的持续时间或吸入电流
的施加的开始定时中的至少一个。
7.在又一方面,燃料喷射控制系统可包括至少一个电源、包括溢流阀的燃料喷射器和控制器,该溢流阀朝向打开位置偏置并包括溢流阀螺线管。所述控制器配置为施加吸入电流以关闭燃料喷射器的溢流阀,检测溢流阀关闭的定时,并基于检测到的溢流阀的关闭的定时来调节吸入电流的幅度、吸入电流的持续时间或吸入电流的施加的开始的定时中的至少一个。
附图说明
8.并入本说明书并构成本说明书的一部分的附图示出了各种示例性实施例,并与说明书一起用于解释所公开的实施例的原理。
9.图1是根据本发明各方面的燃料喷射系统中的燃料喷射器的部分示意性剖视图。
10.图2是图1的燃料喷射系统的示例性发动机控制模块的框图。
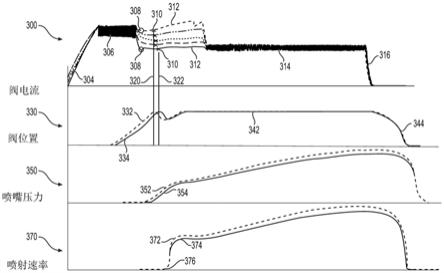
11.图3是示出图1的燃料喷射系统的示例性操作的图表。
12.图4是根据本发明的方面的用于控制发动机系统的燃料喷射器的方法的流程图。
13.图5是示出具有不同电压的电源的图1的燃料喷射系统的示例性操作的图表。
具体实施方式
14.前面的一般描述和下面的详细描述都仅仅是示例性和说明性的,并不限制所要求保护的特征。如在此所使用的,术语“包括”、“包含”、“具有”、“含有”或其其他变体旨在涵盖非排他性的内含物,使得包括一系列要素的过程、方法、物品或设备不仅包括这些要素,而且可以包括未明确列出的或这种过程、方法、物品或设备所固有的其他要素。此外,在本发明中,相对术语(例如,“约”、“基本上”、“通常”和“大致”等)用于指示所陈述的值中
±
10%的可能变化。
15.图1是示出根据本发明的一方面的燃料喷射系统10的图,包括燃料喷射器12的剖视图。燃料喷射系统10可以是内燃机系统的部件,并且可以包括燃料喷射器12和控制系统70,控制系统70包括一个或多个电源,例如高压电源(hvps)84和电池82,以及控制器,例如电子控制模块(ecm)80。燃料喷射器12可以是机械致动的电子控制的单元喷射器,其包括喷射器主体11,该喷射器主体11容纳用于喷射燃料的一个或多个阀以及用于供应、返回和喷射燃料的一系列通道。燃料储存器或压力室17可接收来自燃料源的燃料。压力室17内的燃料可由凸轮致动的活塞(未示出)加压,以向止回阀40提供加压燃料。除了止回阀40之外,燃料喷射器12可以包括一个或多个电控阀,例如溢流阀20和控制阀,例如直接操作控制(doc)阀30。
16.溢流阀20可以是常开阀,其包括溢流螺线管21、溢流电枢23、溢流阀构件25和溢流阀座29。当溢流阀20处于静止或打开位置(图1所示的位置)时,溢流阀构件25可远离座29定位以允许溢流通道22和燃料返回通道13之间的连通,从而减小压力并允许燃料从喷射器12排出。当被致动或关闭时,溢流阀构件25可搁置在溢流阀座29上并防止燃料进入燃料返回通道13。溢流阀20的该致动位置可与燃料喷射相关联。
17.doc阀30可以是常闭阀,其包括doc螺线管31、doc电枢33、doc阀构件35和doc阀座36。在图1所示的doc阀30的第一位置(这里称为静止位置或关闭位置)中,doc阀构件35可定
位成允许控制室42和压力连接通道32之间的连通。当处于该关闭位置时,doc阀构件35可搁置在doc阀座36上并阻止控制室42与低压燃料通道压力连接通道38之间的连通,将控制室42置于防止止回阀构件45运动的加压状态。doc阀构件35可以通过弹簧构件朝向该关闭位置偏置。在第二位置(在此称为致动位置或打开位置)中,doc阀构件35可以阻止控制室42与压力燃料通道32之间的连通,并且可以允许控制室42与低压通道38之间的连通,从而释放控制室42中的压力。doc阀30的致动或打开位置可与燃料喷射相关联。
18.止回阀40可以是包括止回阀构件45的单向针阀,当处于图1所示的关闭位置时,止回阀构件45阻止止回阀室90和喷射孔98之间的连通。当处于打开位置时,可允许止回阀室90和喷射孔98之间的连通,从而允许喷射燃料。弹簧构件48可朝向关闭位置偏置止回阀构件45。另外,当控制室42与压力连接通道32连通时,止回阀构件45可保持在关闭位置。针阀构件45可配置为当doc阀30处于打开或致动位置时从该关闭位置移动到打开位置。例如,当溢流阀20关闭且doc阀30打开时,控制室42可处于与止回阀室90内的压力相比更低的压力,从而允许止回阀室90内的加压燃料抵抗弹簧构件48的偏置力作用并通过孔口98喷射燃料。
19.控制系统70可配置为接收各种感测到的输入并产生命令或其它信号以控制燃料喷射系统10的多个燃料喷射器12的操作。控制系统70可包括ecm 80、电池82、hvps 84和一个或多个传感器,例如配置为检测与喷射器12相关联的温度和/或喷射器12操作的环境的温度传感器86,以及配置为测量与多个燃料喷射器12相关联的内燃机的操作速度的发动机速度传感器88。
20.ecm 80可包括单个微处理器或多个微处理器,其接收输入并发出控制信号,包括向螺线管21和31施加电能。ecm 80可以包含与螺线管21和31电连通的电源(例如,电池82),并且可以向单独的控制电路输出命令,包括用于hvps 84的电路,该电路被配置为升高施加到螺线管21和31的电能的电压。虽然hvps 84被示为在ecm 80之外,但是hvps 84也可以在ecm 80内实现。在一些实施例中,如图1所示,ecm 80可配置为控制经由电池82和hvps 84向螺线管21和31施加能量。ecm 80可发出命令以用来自电池82和/或hvps 84的电力选择性地使螺线管21和31通电,并使螺线管21和31断电以控制由螺线管21和31存储的电能的衰减速率。ecm 80可包括存储器、辅助存储装置、诸如中央处理单元的处理器,或用于实现与本发明一致的任务的任何其他装置。与ecm 80相关联的存储器或辅助存储装置可以存储数据和软件,以允许ecm 80执行其功能,包括下面关于方法400(图4)描述的功能。特别地,存储器或辅助存储装置中的这种数据和软件可允许ecm 80执行本文所述的任何阀到达定时、信号分析和自适应喷射器控制功能。许多市场上可买到的微处理器可被配置为执行ecm 80的功能。各种其它已知的电路可以与ecm 80相关联,包括信号调节电路、通信电路和其它适当的电路。
21.图2示出了ecm 80的示例性配置。在至少一些方面,ecm 80可接收各自对应于一个或多个发动机状况的多个输入200。输入200可以包括一个或多个检测值以及由ecm 80或外部控制单元计算和/或存储的一个或多个值。作为第一输入200,ecm 80可以接收表示电池82的电压的电池电压202。该值可以是ecm 80中检测或存储的值,并代表电池82的电压。发动机速度输入204可以指示由例如发动机速度传感器88检测的内燃机的当前操作速度。压力定时206可表示燃料喷射器12中的燃料加压开始的期望定时,例如喷嘴压力354开始增加的定时,如图3所示和如下所述。该期望的压力定时206可以基于发动机参数如发动机速度
204、要求的发动机输出或其他来计算,并且可以通过利用ecm 80访问映射来确定。阀到达时间208可以对应于检测到的阀到达致动位置的到达时间。阀到达时间208可表示例如溢流阀20到达溢流阀元件25接触溢流阀座29的关闭状态的实际或检测定时。温度210可以对应于由温度传感器86感测的温度,并且可以表示燃料喷射器12本身的温度或燃料喷射器12的环境的温度,例如发动机舱内的温度。
22.ecm 80可包括将多个预期溢流阀到达时间与各种发动机状况相关联的映射250。在一些方面,映射250可允许ecm 80针对一组映射输入获取溢流阀20到达的预期或期望到达时间。多组映射输入可以对应于发动机状况,例如:电池电压202、发动机速度204和压力定时206。由映射250输出的预期到达时间可对应于特定组发动机状况下溢流阀20关闭的期望定时(例如,溢流阀构件25到达溢流阀座29的定时)。溢流阀20的检测到的阀到达时间208的一个或多个值可以连同在阀到达时间208期间存在的发动机状况一起存储在映射250中。ecm 80可以被配置为将检测到的溢流阀到达时间208与由映射250输出的预期溢流阀到达时间进行比较,以便计算这两个值之间的差或误差。ecm 80还可配置为基于该误差调节提供给阀20的螺线管的电能的一个或多个特性,如下所述,并以调节的振幅、持续时间或定时的形式输出调节的阀波形270,用于随后喷射中施加的电流。在至少一些方面中,可施加经调节的阀波形270以调节开始施加电流以关闭溢流阀20的定时。
23.工业实用性
24.燃料喷射系统10可与任何适当的机器、车辆或其它装置或系统结合使用,所述机器、车辆或其它装置或系统包括具有一个或多个燃料喷射器的内燃机,所述燃料喷射器具有至少一个电控阀。特别地,燃料喷射系统10可以用在任何内燃机系统中,其中希望检测电控阀部件(例如螺线管致动阀)到达致动位置的定时。
25.图3是示出电流波形、阀位置、喷嘴压力和喷射速率相对于时间的示例性曲线图的图表。图3中的第一曲线图包括五个示例性电流波形300,每个电流波形300表示由电池82施加到溢流阀螺线管21的不同电压。每个波形可以包括电流斜升304、吸入目标电流306、预测量目标电流308、局部最小电流310、测量电流312、保持电流314和电流斜降316。
26.第二曲线图示出了相对于时间的一对阀位置330,每个曲线分别对应于两个电流波形300。在图3所示的示例中,实线表示阀运动(例如,溢流阀构件25的),该阀运动与具有阀到达时间322的期望阀移动334相匹配,该阀到达时间322对应于针对当前发动机状况存储在映射250中的预期或期望阀到达时间。阀位置图表330的虚线曲线表示阀在实际阀到达时间320到达致动位置的示例性阀运动332。实际阀到达阀到达时间320和期望阀到达时间322之间的差可以表示定时误差。在阀到达之后,阀构件25可以在开始返回过渡344到打开位置之前保持在关闭位置342达期望的时间段。
27.第三曲线图示出示例性喷嘴压力350,包括对应于实际阀移动332的实际喷嘴压力352和对应于期望阀运动334的期望喷嘴压力354。每个喷嘴压力352、354可以在溢流阀20关闭的定时期间建立,并且可以表示燃料喷射器12内的燃料压力,例如止回阀室90内的燃料。
28.图3的第四曲线图示出示例性喷射速率370,包括实际喷射速率372和期望喷射速率374。虽然每个喷射速率372和374可以在大致相同的喷射开始定时376开始,但是由于实际的和期望的喷嘴压力352和354之间的差,实际的喷射速率372可以喷射比期望的更多的燃料。
29.图4是示出用于控制可包括燃料喷射系统10的发动机系统的一个或多个燃料喷射器12的方法400的流程图。方法400可以在发动机的操作期间随时间重复执行,以便逐渐调节向喷射器12的一个或多个阀发出的命令,从而补偿改变的发动机状况,其可以包括环境状况,例如发动机温度,以及改变的发动机自身状况,例如由于磨损引起的喷射器性能的改变。方法400可以例如包括基于检测到的阀到达致动位置的定时来调节由电池82、hvps 84或两者施加的电流的一个或多个方面。虽然方法400将相对于溢流阀20进行描述,但应理解,方法400可应用于doc阀30或其它类型的电控阀。方法400可允许燃料喷射系统10调整施加到喷射器12的一个或多个阀的电流,以便喷射所需量的燃料。
30.在步骤402中,第一电流可施加到螺线管21,产生克服弹簧构件的力将电枢23和溢流阀构件25拉向关闭位置的磁力。该第一电流可以包括从hvps 84或另一电源施加升高电压,使得电流波形包括在由ecm 80确定的定时处的电流斜升304,如图3所示。当已经达到预定目标电流时,升压电压可以被周期性地斩波,从而形成高于和低于预定目标电流的一系列规则重复的波动,如吸入目标电流306(图3)所示。斩波电压可以包括当电流达到预定最大值时中断电能的施加,并且当电流达到预定最小值时重新施加电能,使得电流量在最大值和最小值之间有规律地增加和减少。
31.在步骤404中,在预定定时,可以将第一电流改变为预定电平,例如预测量目标电流308(图3)。可以基于电池电压202和温度210来确定预测量目标电流308。在一些喷射中,预测量目标电流308可以小于吸入目标电流306。在这些喷射中,可以通过逐渐(例如,续流)减小电流或通过降低电流来减小电流以达到预测量目标电流308。在其它喷射中,预测量目标电流308可以大于吸入目标电流306。在这些喷射中,可以施加升高电压以将电流增加到吸入目标电流306之上。
32.一旦达到预先测量目标电流308,可以向螺线管21施加第二电流。可以从不同的源(例如,非斩波源,诸如电池82)施加第二电流。例如,来自电池82的电能可以是非斩波的,因为电能可以从电池82提供而不重复地中断和恢复该电能的施加。示例性的第二电流,即测量电流312,可以在预期阀构件25最初到达关闭位置的时间窗期间施加。在图3所示的示例中,可以施加测量电流312而不进行斩波。在该时间窗期间,步骤408可由ecm 80执行以检测阀构件25到达致动位置的定时。如果需要,该窗口可以在预测量目标电流308之后的预定延迟之后开始。ecm 80可以通过搜索测量电流312中的预定模式来检测该到达定时。预定模式可以对应于在施加测量电流312时检测到的局部电流最小值。在图3中用“x”指示的该局部最小值可以允许ecm 80确定从最初施加电流的时间(例如,在电流斜升304开始时)经过的时间段。在一些方面中,比较器电路可有助于根据局部最小电流的存在来检测阀到达时间。
33.由ecm 80检测到的实际阀到达时间208的值可以存储或记录在ecm80中。ecm 80还可存储与阀到达时间208相关联的一组当前发动机状况,包括电池电压202、发动机速度204和压力定时206中的一个或多个。
34.步骤410可以包括利用ecm 80确定与当前发动机状况相关联的定时误差。这可以通过将检测到的或实际的阀到达时间208与预期的阀到达时间进行比较来执行。实际阀到达时间可以对应于存储在ecm 80的存储器中的值,该值表示存储或记录在ecm 80中的单个检测到的阀到达时间208,或与相同或类似的发动机状况相关联的滤波和/或平均的阀到达时间208的组。该误差可表示实际阀到达时间(例如由图3中的到达时间320表示的阀到达时
间208)与存储在与ecm 80相关联的存储器中的预期阀到达时间(例如由到达时间322表示的从映射250输出的预期阀到达时间)之间的差。为了避免多个阀到达时间测量中的的离群值的影响,ecm 80可以应用滤波器,或者对与相同或相似的发动机状况相关联的多个不同的阀到达时间测量进行平均,并且比较该滤波的和/或平均的阀到达时间以确定误差。如上所述,这些不同的阀到达时间测量值可以存储在与ecm 80相关联的存储器中。
35.如果需要,步骤410可包括将定时误差的值与一个或多个预定阈值进行比较,以便为喷射器12执行预后和/或诊断功能。例如,基于溢流阀20随时间经历的磨损,定时误差可指示燃料喷射器12中剩余的使用寿命量。该信息可由ecm 80输出作为预后指示符,该预后指示符指示喷射器12中累积的剩余使用寿命或磨损。附加地或替代地,ecm 80可在定时误差超过预定阈值时确定存在燃料喷射器12的故障状态。当这种情况发生时,ecm 80可输出指示喷射器12的故障状态的诊断指示器。
36.步骤412可包括在一次或多次后续喷射中调节用于控制燃料喷射器12的一个或多个参数。例如,ecm 80可以调节吸入电流的幅度、吸入电流的持续时间、开始施加吸入电流的定时,或其任意组合(图3)。调节吸入电流的幅度可以包括增加或减少用于一个或多个后续喷射的吸入目标电流306和保持电流314中的一个或多个。调节吸入电流的持续时间可以包括增加或减少吸入目标电流306的持续时间、保持电流314的持续时间、在喷射期间将电流施加到溢流阀螺线管21的总持续时间、在阀到达时间之后施加电流的持续时间或其任何组合中的一个或多个。调节开始施加吸入电流的定时可以包括改变诸如hvps 84的电源开始向溢流阀螺线管21施加电流的定时,由电流斜升304的初始增加表示。当以这种方式调节时,实际阀到达时间320可以基本上对应于期望阀到达时间322,从而消除了溢流阀的定时误差。
37.当发动机状况随时间变化时,也可基于包括燃料喷射系统10的发动机系统的电池电压202、发动机速度204或加压定时206的期望开始中的至少一个来执行调节。例如,这些值中的一个或多个的变化可导致映射250确定更新的预期溢流阀到达时间,从该时间可计算一个或多个后续喷射的定时误差。
38.图5是示出多个喷射事件的图表,其中不同的电压被施加到溢流螺线管21。这些不同的电压可以是电池82的不同电压。图5的第一曲线图示出了多个示例性电流波形500,每个波形表示具有不同电压的能量源(例如电池82)的使用。例如,如下所述,虚线的第一波形表示第一电池电压的使用,短划线的第二波形表示第二电池电压的使用,实线的第三波形表示第三电池电压的使用。
39.图5所示的阀电流波形可以包括例如由单独标记的第一502、第二504和第三506电流斜升表示的电流斜升、吸入目标电流508、第一电池电流510、可选的升压电流512、测量电流514以及保留和/或保持电流516。可以施加吸入目标电流508、第一电池电流510和升压电流512来代替吸入目标电流306,并且可以执行类似的功能。因此,吸入目标电流508、第一电池电流510和升压电流512中的一个或多个可对应于第一电流。在电流波形500中施加电池电流510以保存系统10的电能可能是有用的。由阀返回静止位置的运动引起的电流由图5中的续流电流518表示。
40.第一电池电流510和测量电流514的不同电流和测量电流514的不同电流电平(其可对应于第二电池电流)表示由具有不同电压的电池82施加的电流,其中较低电流对应于
具有较低电压的电池。因此,实线波形表示三个示例性电压中最高的电池电压,而虚线波形表示三个电压中最低的电池电压。
41.这些波形中的每一个可以表示基于一个或多个先前的阀到达时间测量的经调节的阀波形270的示例。如上所述,可以基于来自先前喷射的一个或多个定时误差来调节诸如电流504-514中的一个或多个的吸入电流的幅度、吸入电流的持续时间和/或开始施加吸入电流的定时。通过进行这样的调节,可以实现一致的期望喷射质量,如图5的第二曲线图中的示例性喷射速率520所示。
42.图5中的较低波形示出了当ecm 80执行上述调节时对应于该图的第一图表中的三个阀电流波形500中的每一个的示例性喷射速率520。如图5所示,虽然每个吸入电流的施加的开始定时是不同的,但是喷射522的开始定时、最大喷射量524和喷射526的结束定时近似相同。因此,通过进行上述调节,可以喷射所需量的燃料,同时采用具有降低电压的电源。
43.在一些燃料喷射器中,需要向控制器提供关于燃料喷射器的特性的信息,以便根据需要控制喷射器。然而,变化的环境因素、变化的功率要求或两者对喷射器的操作至少有一些影响。通过检测阀的到达时间,特别是在向用于阀的螺线管施加电流期间,可以产生用于精确控制喷射器的命令。例如,可以调节这些命令以改变溢流阀电流的特性,例如溢流阀电流开始的定时,从而改善对喷射压力开始的控制。这种对喷射压力开始的改进控制可以通过对溢流阀到达定时的精确控制来实现。实现喷射压力的期望开始可导致例如对喷射开始定时的改进控制和对由喷射器输送的燃料量的控制,这可用于改进发动机操作的方面。因此,通过检测阀的到达时间,可以将喷射的燃料量减少到所需的量,从而改善排放性能并减少例如由发动机产生的烟雾的量和/或不透明度。另外,可以降低用于控制燃料喷射器的系统的功率需求。最后,在至少一些配置中,到达时间的检测可以减少或避免在安装新的喷射器时用燃料喷射器的信息对控制器进行预编程的需要。
44.对于本领域技术人员显而易见的是,在不脱离本发明的范围的情况下,可以对所公开的方法和系统进行各种修改和变化。通过考虑在此公开的设备和系统的说明书和实践,本领域的技术人员将清楚该方法和系统的其它实施例。本说明书和示例旨在被认为仅是示例性的,本发明的真实范围由所附权利要求及其等同物指示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1