基于气动肌肉驱动的吸附式风电叶片爬行机器人
1.本发明属于机器人或风电行业领域,涉及一种基于气动肌肉驱动的吸附式风电叶片爬行机器人。
背景技术:
2.风力发电是可再生能源领域中最成熟、最具规模开发条件和商业化发展前景的发电方式之一,且可利用的风能在全球范围内分布广泛、储量巨大。同时,随着风电相关技术不断成熟、设备不断升级,中国风力发电行业高速发展,2020年中国风力发电发电量达4665亿千瓦时,较2019年增加了608亿千瓦时,同比增长14.99%。利用风力发电非常环保,且风能蕴量巨大,因此日益受到世界各国的重视,近年来中国风力发电发电量占全国发电总量的比例逐年攀升,2020年中国风力发电发电量占全国发电总量的6.12%,较2014年的2.85%增长了3.27%。
3.随着风力发电需求量不断增长,风能装机亦迅速稳定的增长,截止到2018年,我国装机容量达到2100万千瓦。由于风机生产厂家的不断增多,导致竞争越来越大,风机厂家不得不降低生产成本,低成本制造意味着更高的成品缺陷率。到2024年,全球风力涡轮机检查服务的累计收入预测将达到每年近60亿美元。随之而来的叶片维护,成为风电场的重要工作,因为投入运行的风叶数量和使用年限持续增长;大型叶片增加了侵入式检修或更换叶片需求。因此,与风电叶片检查、维护等相关的巡检工作被提上日程。
4.传统的巡检工作多由人工完成,其不利条件如下:(1)风力发电装备地处偏远、排布分散、日常维护难度大;(2)巡检工作量大、周期长、安全性差、效率低;(3)观察角度有限,雷击点、叶片边缘检测困难。为了提高叶片可靠性,减少叶片停机时间,延长叶片寿命,降低人工维护成本,减少人工登塔次数,保障巡检人员的人身安全,机器人巡检便应运而生。
5.现有的吸附式的爬行机器人,均由电机提供驱动力,由压缩空气泵提供气源,完成行走和吸附两个功能。在实际应用中,因为机器人要在巨大的叶片上完成长距离行走,因此需要拖拽很长的气管,而压缩空气在长距离输送过程中又容易损失能量,降低压力,对机器人的吸附能力产生影响。
技术实现要素:
6.本发明的目的是提供一种基于气动肌肉驱动的吸附式风电叶片爬行机器人,无需额外的压缩空气泵来提供气源,即可实现行走与吸附功能,在风电叶片表面,对叶片进行检查维修。
7.本发明的技术方案为:本发明主要由基于气动肌肉驱动的吸附系统、正弦机构、三曲柄联动机构组成。
8.所述基于气动肌肉驱动的吸附系统主要由电机,转动轮,正弦滑槽,滑块,气缸,气动肌肉,吸盘组成。每个吸附系统控制机器人对角线一对吸盘,两套吸附系统交替工作,完成四足的交替吸附爬行周期运动。
9.机器人躯干中间对称安装两个电机,电机轴与转动轮键槽连接,转动轮上的圆柱在正弦滑槽内转动,带动正弦滑槽在滑块上直线滑动,从而带动气缸内活塞杆直线运动。气缸内受压的一端,通过气路把压缩空气输入气动肌肉,气动肌肉膨胀变短,拉动侧板上的正弦滑槽直线运动,拨动槽内圆柱带动转动轮转动,从而带动三曲柄联动机构向下转动,机构末端的吸盘,则同步完成吸附工作。
10.当活塞杆反向运动,气动肌肉内部压缩空气回到气缸中,气动肌肉对面的拉簧拉动正弦滑槽直线运动,从而转动轮转动,带动三曲柄机构向上转动,此时气缸另一端排出空气,吸盘松开。对角线上的两足步态相同,按照吸附-松开抬腿-吸附的周期性运动规律,完成爬行。
11.所述正弦机构,主要用于构件的直线运动和圆周运动之间做转化。机器人躯干上有两对正弦机构,用于将电机的转动转化为气缸的活塞运动。机器人两侧板上共四套正弦机构,由气动肌肉和拉簧分别作用,将直线运动转化为圆周运动,从而控制三曲柄联动机构转动,完成四足交替爬行运动。
12.本发明的有益效果:在实际应用中,巡检机器人要在巨大的叶片上完成长距离行走,因此需要拖拽很长的气管,而压缩空气在长距离输送过程中又容易损失能量,降低压力,对机器人的吸附能力产生影响。本发明的目的是提供一种基于气动肌肉驱动的吸附式风电叶片爬行机器人,无需额外的压缩空气泵来提供气源,即可实现行走与吸附功能,在风电叶片表面,对叶片进行检查维修,结构设计精巧,节约能源,具有极大的研究和使用价值。
附图说明
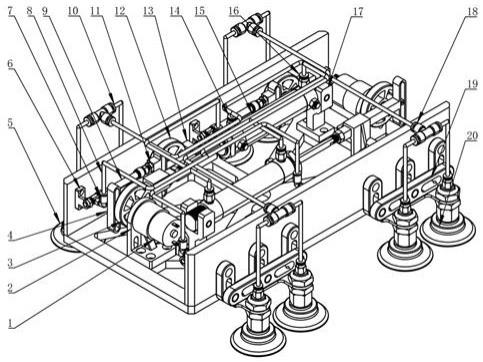
13.图1为本发明一种基于气动肌肉驱动的吸附式风电叶片爬行机器人三维模型图;图2为本发明基于气动肌肉驱动的吸附系统气路简图;图3为本发明正弦机构和三曲柄联动机构主视图;图4为本发明一种基于气动肌肉驱动的吸附式风电叶片爬行机器人爬行步态示意图。
14.附图1标记:1 减速电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2 电机支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3 转动轮4 正弦滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5 吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 支座7 接头a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8 气管a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9 气动肌肉10气管b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11 正弦滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 转动轮13 滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14 气缸接头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15 气缸16 接头b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17气缸尾架固定座
ꢀꢀꢀꢀꢀꢀ
18 三通接头19 三曲柄联动机构
ꢀꢀꢀꢀꢀ
20 吸盘附图3标记:9 气动肌肉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11 正弦滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 转动轮13 滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
19 三曲柄联动机构20 吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21 拉簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22 接口。
具体实施方式
15.为使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图及具体实施例对本发明作进一步地详细描述。应当理解,此处所描述的具体实施例仅用于解释本发明,而不是限定本发明。
16.本发明主要由基于气动肌肉驱动的吸附系统、正弦机构、三曲柄联动机构组成。
17.所述基于气动肌肉驱动的吸附系统由电机,转动轮,正弦滑槽,滑块,气缸,气管接头,气管,气动肌肉,吸盘组成。每个吸附系统控制机器人对角线一对吸盘,两套吸附系统交替工作,完成四足的交替吸附爬行周期运动。机器人躯干中间对称安装两个电机,电机轴与转动轮键槽连接,转动轮上的圆柱在正弦滑槽内转动,带动正弦滑槽在滑块上直线滑动,从而带动气缸内活塞杆直线运动。气缸内受压的一端,通过气路把压缩空气输入气动肌肉,气动肌肉膨胀变短,拉动侧板上的正弦滑槽直线运动,拨动槽内圆柱带动转动轮转动,从而带动三曲柄联动机构向下转动,机构末端的吸盘,则同步完成吸附工作;当活塞杆反向运动,气动肌肉内部压缩空气回到气缸中,气动肌肉对面的拉簧拉动正弦滑槽直线运动,从而转动轮转动,带动三曲柄机构向上转动,此时气缸另一端排出空气,吸盘松开。对角线上的两足步态相同,按照吸附-松开抬腿-吸附的周期性运动规律,完成爬行。
18.所述正弦机构,主要用于构件的直线运动和圆周运动之间做转化。机器人躯干上有两对正弦机构,用于将电机的转动转化为气缸的活塞运动。机器人两侧板上共四套正弦机构,由气动肌肉和拉簧分别作用,将直线运动转化为圆周运动,从而控制三曲柄联动机构转动,完成四足交替爬行运动。以侧板上一套正弦机构为例,其由固定支座、气动肌肉、正弦滑槽、滑块、转动轮、拉簧、气管组成。由气缸向气动肌肉输入压缩空气,控制气动肌肉完成收缩和复原动作,从而完成吸附、爬行,松开、抬腿等动作。
19.所述三曲柄联动机构由曲柄、连杆、吸盘、接头、气管组成。机构利用了第三根平行曲柄来消除平行四边形机构运动中的奇异点,保证连杆上的吸盘始终处于水平姿态。该机构由气动肌肉驱动,气缸一端空气受压,将空气输入气动肌肉,气动肌肉膨胀变短,驱动正弦机构转动,从而带动曲柄运动;气缸另一端内部空气被吸附,产生短暂真空现象,从而保证吸盘吸附在风电叶片上。
20.利用上述机器人进行爬行的方法:将基于气动肌肉驱动的吸附式风电叶片爬行机器人放置在风电叶片的末端,如图4中a所示。对照图1,启动减速电机1,带动键槽连接的转动轮3圆周运动,转动轮3带动正弦滑槽4做直线往复运动,正弦滑槽4带动气缸活塞杆15往复运动,分别通过气缸接头14和接头b 16完成抽真空和推入压缩空气的功能,而无需再提供额外的压缩气源。
21.活塞杆由气缸接头14向接头b 16方向运动。气缸接头14,通过气管,对吸盘5和吸盘20进行抽真空操作,确保吸附在叶片表面;接头b 16,通过气管,对气动肌肉9和对角的气动肌肉进行充气,气动肌肉充气膨胀变短,驱动两边正弦机构运动,从而带动三曲柄联动机构转动。整个吸附系统气路简图如图2所示。
22.三曲柄联动机构,由气动肌肉驱动。如图3所示,当气动肌肉9充气、膨胀变短,拉动正弦滑槽11直线运动,完成1/2圈后,气动肌肉9随气缸内活塞杆反向运动而放气、变长,拉簧21拉动正弦滑槽11直线运动,完成剩下1/2圈,如此,转动轮完成一个圆周运动,对应三曲柄联动机构19完成一个圆周运动。
23.实施例:图1为本发明的三维模型图。图中主要包括基于气动肌肉驱动的吸附系统、正弦机构和三曲柄联动机构。
24.基于气动肌肉驱动的吸附系统总共两套,列举其中一套进行说明:如图1所示,由电机1,电机支座2,转动轮3,正弦滑槽4,气缸15,气管尾架固定座17,气缸接头14,接头b 16,气管a 8,气管b 10,吸盘5组成。
25.正弦机构分为躯干部分(两套)和侧板部分(四套)。列举侧板上其中一套进行说明:如图3所示,由气动肌肉9,正弦滑槽11,转动轮12,滑块13,支座16,三曲柄联动机构19,吸盘20,拉簧21,接口22组成。
26.三曲柄联动机构总共四套,类似于机器人的四足,列举其中一套进行说明:如图3所示,由主动轮12(驱动背面曲柄运动),三曲柄联动机构19,吸盘20组成。
27.将基于气动肌肉驱动的吸附式风电叶片爬行机器人放置在风电叶片末端,如图4中a所示,初始步态,两对吸盘着地,两对吸盘悬空,对角分布。对照图1,启动减速电机1,带动键槽连接的转动轮3圆周运动,转动轮带动正弦滑槽4做直线往复运动,正弦滑槽带动气缸活塞杆15往复运动,分别通过气缸接头14和接头b 16完成抽真空和推入压缩空气。对照图2中a所示,活塞杆左侧,压缩空气推入气动肌肉,气动肌肉充气膨胀变短,驱动正弦滑槽运动,从而带动三曲柄联动机构转动;活塞杆右侧,吸盘贴合叶片,完成抽真空操作,确保吸盘吸附在风电叶片表面。
28.接下来,减速电机1继续转动,带动气缸活塞杆由左向右移动,气动肌肉内的气体输入气缸左腔,右侧气体被活塞杆推入气管,向外排出,吸盘松开,如图2中b所示。此时气动肌肉的长度复位,对应正弦滑槽11由对面的拉簧21拉回,带动转动轮12圆周运动,从而带动三曲柄联动机构19运动,如图3所示。此过程为中间步态,如图4中b所示。
29.活塞杆到达右边后,再次向左边运动,从而再次对气动肌肉充气,如图2中a所示,此时机器人的吸盘完成一次吸附-松开抬腿-吸附的周期运动,处于完成状态,如图4中c所示。如此周期性的反复运动,完成机器人在风电叶片上爬行的功能。在机器人的躯干上加装检测装置后,即可实现在叶片上的检查维修工作。
30.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则内所做的任何的修改、等同替换和改进等,均应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1