一种可利用波浪能实现自动定位的海洋浮标
1.本发明涉及海域的水文和气象检测领域,特别涉及一种利用波浪能实现自动定位的海洋浮标。
背景技术:
2.海洋浮标在世界范围内都有广泛的应用,它可以帮助人类持续监测某一海域的水文和气象等信息。通常来讲,海洋浮标需要定位在同一相对位置,以此来观察目标海域的长期特征。目前,使浮标位置维持不变的主要方法是:利用绳索将浮标帮在海底岩石上。然而,这种方法存在一个十分大的弊端。如果海水深度过高,将很难到达海底以绑定浮标。这就需要装置能够自主产生驱动力实现定位。
3.要实现此功能,需要长期有稳定的能量供应,如果使用蓄电池进行供电,将会需要频繁进行更换,这将十分的不便。其他清洁能源,例如太阳能、风能等,由于技术限制,这些能量的能量转化率都很低且易受到环境因素的影响,而浮标除了自动定位功能,它上面的其他设备也需要大量的能量供应,因此这些能源都难以满足能量供应。
4.其中,如申请号为:2013100784372的专利申请,公开了一种波浪能发电装置,包括发电机、浮体、机架、摆锤及传动装置;浮体与机架相连接;摆锤和传动装置均设于机架内;传动装置包括主传动齿轮、辅助传动齿轮、第一单向轴承齿轮和第二单向轴承齿轮;主传动齿轮通过主轴体组件转动连接在机架上;摆锤固定在主传动齿轮上;辅助传动齿轮通过辅轴体组件转动连接在机架上且辅助传动齿轮与主传动齿轮啮合;第一单向轴承齿轮与第二单向轴承齿轮通过动力输出轴组件转动连接在机架上且第一单向轴承齿轮内圈的运动方向与第二单向轴承齿轮内圈的运动方向相同;第一单向轴承齿轮与主传动齿轮啮合;第二单向轴承齿轮与辅助传动齿轮啮合;动力输出轴与发电机连接。
5.该装置中,主传动齿轮与辅助传动齿轮及第一单向齿轮啮合,辅助传动齿轮与第二单向齿轮啮合,采用大齿轮驱动小齿轮做增速运动,为输入高扭矩输出低扭矩,会造成驱动费力,同时使得该装置结构复杂,能效利用率不高。
技术实现要素:
6.本发明要解决的技术问题:本发明的目的是为了解决现有技术中芯片装夹复杂和装置体积大的问题,提供一种可利用波浪能实现自动定位的海洋浮标。
7.本发明的技术方案:本发明所述一种可利用波浪能实现自动定位的海洋浮标,包括浮标壳体、设置在所述浮标壳体内的发电机、驱动所述发电机转子转动的波浪能转化机构、定位系统、蓄电池以及设置在所述浮标壳体上,用于驱动所述浮标壳体在水面运动的移动装置;所述蓄电池用于储蓄所述发电机产生的电能并为所述定位系统及所述移动装置供能;
8.所述波浪能转化机构包括主驱动锥齿轮和摆锤机构;所述主驱动锥齿轮连接所述发电机的转子转轴;
9.所述主驱动锥齿轮两侧设有与所述主驱动锥齿轮啮合的第一锥齿轮和第二锥齿轮;所述第一锥齿轮和第二锥齿轮处于同一轴线上,且关于所述主驱动锥齿轮对称分布;
10.所述摆锤机构包括摆锤和连接所述摆锤与第一锥齿轮的第一摆杆、连接所述摆锤与第二锥齿轮的第二摆杆;
11.所述第一摆杆通过第一单向轴承驱动所述第一锥齿轮转动;
12.所述第二摆杆通过第二单向轴承驱动所述第二锥齿轮转动;所述第一单向轴承与所述第二单向轴承的有效转动方向相反。
13.进一步的,所述第一单向轴承的内圈与所述第一锥齿轮固定连接,所述第一单向轴承的外圈与所述第一摆杆固定连接;
14.所述第二单向轴承的内圈与所述第二锥齿轮固定连接,所述第二单向轴承的外圈与所述第二摆杆固定连接。
15.进一步的,所述第一摆杆与所述第二摆杆分别设置于所述摆锤两侧,与所述摆锤同步运动。
16.进一步的,所述主驱动锥齿轮与所述发电机间设有联轴器。
17.进一步的,所述移动装置包括螺旋桨及用于驱动所述螺旋桨的电动机。
18.进一步的,所述导航系统能够利用北斗卫星导航系统确定浮标位置,并根据浮标预设位置,发送信号给移动装置,驱动所述移动装置驱动浮标到达所述预设位置。
19.本发明与现有技术相比的有益效果:
20.1.在主驱动锥齿轮两侧设有与所述主驱动锥齿轮啮合的第一锥齿轮和第二锥齿轮,并通过对应的单向轴承与摆锤机构连接;在波浪能的冲击下,由摆锤组件会相对于浮标壳体发生摆动;
21.当摆锤逆时针转动的时候,第一单向轴承可以将转动通过连接轴传送至第一锥齿轮,驱动第一锥齿轮逆向时针转动;而此时,第二单向轴承却不会将转动传至轴,因此第二锥齿轮不发生转动;同理,当摆锤顺时针转动的时候,第一锥齿轮不发生转动,第二锥齿轮发生顺时针转动;
22.在这两种情况下,主驱动锥齿轮只会发生同一方向的转动,如此一来便实现了将摆锤双向转动转化成了主驱动锥齿轮的单向转动,同时确保了摆锤无论朝哪个方向运动的能量都会被主驱动锥齿轮传送至发电机;因此,本装置可将相反方向的轴转动转化为固定方向的轴转动,可以有效地实现波浪能的储存与利用,使得浮标装载设备能够长期稳定的工作,不必像传统设备需要人工更换电池,省却诸多麻烦,降低了成本;
23.2.本发明可以实现自动定位的效果,避免由于海洋波浪而造成浮标位置的改变;甚至,在指挥中心人工发射新的位置坐标,该装置可以实现自动移动至新的位置。
24.3.本发明具有质量相对较大的摆锤位于装置下部,并采用具有一定长度的第一摆杆与第二摆杆连接对应的锥齿轮,相较于现有技术中摆锤中心偏高,在降低装置质心的同时,提升装置的稳定性,且根据杠杆原理,延长了摆锤的力矩,增加了对锥齿轮驱动力的输出。
附图说明
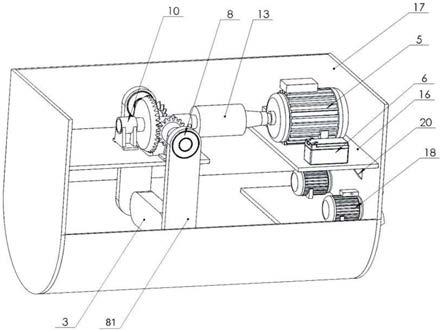
25.图1为本发明的整体结构示意图;
26.图2为本发明中波浪能转化机构的具体结构示意图。
具体实施方式
27.为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
28.本发明为可利用波浪能实现自动定位的海洋浮标,如图1-2所示,包括浮标壳体17、设置在浮标壳体17内的发电机5、驱动发电机转子转动的波浪能转化机构、定位系统、蓄电池6以及设置在浮标壳体17上,用于驱动浮标壳体17在水面运动的移动装置;蓄电池6用于储蓄发电机5产生的电能并为定位系统及移动装置供能;移动装置包括螺旋桨及用于驱动螺旋桨的电动机。
29.波浪能转化机构包括主驱动锥齿轮2和摆锤机构;主驱动锥齿轮2连接发电机5的转子转轴;主驱动锥齿轮2通过主驱动轴12连接联轴器12,并通过联轴器13驱动发电机5的转子转动。
30.主驱动锥齿轮2两侧设有与主驱动锥齿轮2啮合的第一锥齿轮8和第二锥齿轮9;第一锥齿轮8和第二锥齿轮9处于同一轴线上,且关于主驱动锥齿轮2对称分布;
31.摆锤机构包括摆锤3和连接摆锤3与第一锥齿轮8的第一摆杆81、连接摆锤3与第二锥齿轮9的第二摆杆91;第一摆杆81与第二摆杆91分别设置于摆锤3两侧,与摆锤3同步运动;
32.第一摆杆81通过第一单向轴承80驱动第一锥齿轮8转动;
33.第二摆杆91通过第二单向轴承90驱动第二锥齿轮9转动;第一单向轴承80与第二单向轴承90的有效转动方向相反,具体的,第一单向轴承80的内圈与第一锥齿轮8固定连接,第一单向轴承80的外圈与第一摆杆81固定连接;
34.第二单向轴承90的内圈与第二锥齿轮9固定连接,第二单向轴承90的外圈与第二摆杆91固定连接。
35.其中,单向轴承齿轮的工作原理是,当单向轴承齿轮的外圈朝有效方向旋转时,单向轴承齿轮的内圈也会旋转,当单向轴承齿轮的外圈朝无效方向旋转时,单向轴承齿轮的内圈就与外圈脱开。
36.本发明具有能效高且解决海洋浮标部分海域无法定位的特点,具体在于在主驱动锥齿轮2两侧设有与主驱动锥齿轮2啮合的第一锥齿轮8和第二锥齿轮9,并通过对应的单向轴承与摆锤机构连接;在波浪能的冲击下,由摆锤组件会相对于浮标壳体发生摆动;
37.当摆锤逆时针转动的时候,第一摆杆81在摆锤3的驱动下,带动第一单向轴承81的外圈转动,并驱动第一单向轴承81的内圈将转动通过连接轴传送至第一锥齿轮8,驱动第一锥齿轮8逆向时针转动;而此时,第二摆杆91带动第二单向轴承91的外圈转动,由于转动方向与第二单向轴承91的有效方向相反,因此第二单向轴承91的内圈与外圈脱离,第二单向轴承91内圈不会将转动传至轴,因此第二锥齿轮9不发生转动;
38.同理,当摆锤顺时针转动的时候,第一锥齿轮8不发生转动,第二锥齿轮9发生顺时针转动;
39.在这两种情况下,主驱动锥齿轮2只会发生同一方向的转动,如此一来便实现了将摆锤双向转动转化成了主驱动锥齿轮2的单向转动,同时确保了摆锤无论朝哪个方向运动
的能量都会被主驱动锥齿轮2传送至发电机5;因此,本装置可将相反方向的轴转动转化为固定方向的轴转动,可以有效地实现波浪能的储存与利用,使得浮标装载设备能够长期稳定的工作,不必像传统设备需要人工更换电池,省却诸多麻烦,降低了成本;其次,本发明可以实现自动定位的效果,避免由于海洋波浪而造成浮标位置的改变;甚至,在指挥中心人工发射新的位置坐标,该装置可以实现自动移动至新的位置;最后,本发明具有质量相对较大的摆锤位于装置下部,并采用具有一定长度的第一摆杆81与第二摆杆91连接对应的锥齿轮,相较于现有技术中摆锤中心偏高,在降低装置质心的同时,提升装置的稳定性,且根据杠杆原理,延长了摆锤的力矩,增加了对锥齿轮驱动力的输出。
40.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1