一种基于J1939协议的柴油机油门驱动装置的制作方法
一种基于j1939协议的柴油机油门驱动装置
技术领域
1.本实用新型涉及发动机油门驱动技术领域,具体为一种基于j1939协议的柴油机油门驱动装置。
背景技术:
2.采用电子控制燃油喷射及排放的柴油机即为电喷柴油机。电喷柴油喷射系统由传感器、ecu(计算机)和执行机构三部分组成,可对喷油系统进行电子控制,实现对喷油量以及喷油定时随运行工况的实时控制;电喷柴油喷射系统采用转速、油门踏板位置、喷油时刻、进气温度、进气压力、燃油温度、冷却水温度等传感器,将实时检测的参数同时输入计算机(ecu),与已储存的设定参数值或参数图谱(map图)进行比较,经过处理计算按照最佳值或计算后的目标值把指令送到执行器。执行器根据ecu指令控制喷油量(供油齿条位置或电磁阀关闭持续时间)和喷油正时(正时控制阀开闭或电磁阀关闭始点),同时对废气再循环阀、预热塞等执行机构进行控制,使柴油机运行状态达到最佳。但现有传统的机械油门工程机械还缺乏与电喷柴油喷射系统的连接及驱动手段。
3.j1939是美国汽车工程协会(sae)的推荐标准,用于为中重型道路车辆上电子部件间的通讯提供标准的体系结构。它由“卡车与大型客车电气与电子委员会”(track&bus electrical&electronics committee)下属的“卡车与大型客车控制和通讯网络附属委员会”(track&bus control and communications network subcommittee)开发编写。j1939基于德国bosch公司(robert bosch gmbh)开发的控制器局域网络(can:controller area network),可达到250kbps的通讯速率。它描述了重型车辆现场总线的一种网络应用,包括can网络物理层定义、数据链路层定义、应用层定义、网络层定义、故障诊断和网络管理。在sae j1939协议中,不仅仅指定了传输类型、报文结构及其分段、流量检查等,而且报文内容本身也做了精确的定义。j1939是在商用车辆、舰船、轨道机车、农业机械和大型发动机中应用最广泛的应用层协议。
技术实现要素:
4.本实用新型是为克服现有技术现有传统的机械油门工程机械还缺乏与电喷柴油喷射系统的连接及驱动手段的问题,提供一种结构合理,在无接触位置反馈发动机油门驱动装置上,增加控制电路和驱动模块,基于j1939协议的柴油机油门驱动装置。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种基于j1939协议的柴油机油门驱动装置,包括油门驱动装置,所述的油门驱动装置包括电机安装箱、油门拉线,所述的电机安装箱内设有驱动电机、油门拉线驱动轮、驱动轮旋转角度测量电路板、控制电路板,所述的电机安装箱还设有油门软轴、出线防水接头,所述的油门拉线一端穿过油门软轴与油门拉线驱动轮连接,所述的油门拉线驱动轮与驱动电机输出轴一端固定,所述的控制电路板设有输入调理电路、can隔离驱动电路、电源变换电路、cpu中央处理单元、电机驱动电路、角度测量电路、转速测量电路,所述的电机驱
动电路与驱动电机连接,所述的角度测量电路与驱动轮旋转角度测量电路板连接,所述的控制电路板还分别与外部电源、控制器连接。
7.作为本实用新型优选的方案,所述的油门拉线驱动轮中部设有磁钢,所述的驱动轮旋转角度测量电路板设于油门拉线驱动轮外侧且与磁钢之间设有间隔,所述的驱动轮旋转角度测量电路板上设有与磁钢位置配合的霍尔角度传感器。
8.作为本实用新型优选的方案,所述的驱动轮旋转角度测量电路板上的霍尔角度传感器为triaxis三轴霍尔角度传感器,所述的磁钢与位置传感电路板之间的间隔距离为0.5
‑
2毫米。
9.本方案中,通过驱动电机带动油门拉线驱动轮旋转,驱动油门拉线在油门软轴中伸缩运动,最终由油门拉线带动发动机的油门大小,对发动机进行转速控制,油门拉线伸缩的具体距离由霍尔角度传感器测量,即通过测量安装于油门拉线驱动轮上的磁钢和位置传感电路板上霍尔角度传感器相对旋转角度获取油门拉线伸缩的具体距离;油门拉线另一端穿过油门软轴的通孔在电机安装箱外,该端与发动机油门装置相连接。
10.为了精确控制发动机的油门大小,需要实时、可靠的获取当前的油门拉线伸缩行程,本方案使用霍尔角度传感器对油门拉线驱动轮进行旋转角度的测量,triaxis三轴霍尔角度传感器既可以感应垂直方向也可以感应平行与芯片表面的磁场强度;安装于油门拉线驱动轮中心位置的径向磁化磁钢的磁场在安装于位置传感电路板中心位置的传感器芯片表面上方旋转,其强度可以通过非接触式的方式测量,如图2所示,角度的信息可以通过磁场的两个矢量分量(例如bx和by)计算得到,并产生一个正比于角度的模拟量输出电压;本方案实例产品行程与传感器输出的关系如图3所示;采用本方案结构进行油门行程测量,在纵向方向只需要增加一个磁钢,磁钢与位置传感电路板之间大于0.5mm小于2mm间隙,加上位置传感电路板的厚度2mm,总共小于4mm的距离,远远小于普通电位器的纵向距离,并且由于本方案测量采用非接触式的方式,大大增加了测量的可靠性。
11.作为本实用新型优选的方案,所述的cpu中央处理单元包括io输入模块、j1939协议解析模块、柴油机自动怠速控制模块、数据存储模块、柴油机油门高低怠速标定模块、柴油机转速控制模块、柴油机油门位置控制模块、油门电机无极双向驱动模块、油门拉线驱动轮角度检测模块、柴油机转速测量模块。
12.作为本实用新型优选的方案,所述的输入调理电路与外部先导压力梭阀组压力开关连接,所述的can隔离驱动电路与外部电喷柴油机型工程机械控制仪表或控制器连接,所述的电机驱动电路为pwm桥式电机驱动电路,所述的转速测量电路与外部柴油机上的转速传感器连接。
13.作为本实用新型优选的方案,所述的电源变换电路与外部供电系统连接,所述的电源变换电路输入电压为12v或24v,所述的电源变换电路输出电压为3.3v、5v和12v。
14.本方案的硬件电路主要由输入调理电路、can隔离驱动电路、电源变换电路、cpu中央处理单元、pwm桥式电机驱动电路、角度测量电路、转速测量电路组成,各部分功能如下:电源变换电路将工程机械供电系统12的12v或24v供电电压转化为系统内部的3.3v、5v和12v电源,给各系统供电。输入调理电路用于检测外部先导压力梭阀组压力开关信号,用于判定工程机械是否工作。can隔离驱动电路与外部电喷柴油机型工程机械控制仪表或控制器进行通讯,用于接收j1939柴油机工作命令,并将自身的油门位置和转速信号通过j1939
协议反馈给电喷柴油机型工程机控制仪表或控制器。cpu中央处理及存储单元用于完成各控制逻辑并存贮标定数据。pwm桥式电机驱动电路用于对柴油机油门驱动装置的油门拉线驱动电机进行无极双向调速控制。角度测量电路用于调理检测角度传感器输出的正比于油门拉线驱动轮转动角度的输出模拟电压,用于输入cpu中央处理单元。转速测量电路用于调理柴油机上的转速传感器输出信号,用于输入cpu中央处理单元。
15.本方案包括两大工作模式,运行模式和标定模式。驱动装置安装到柴油机油门上时,由于机械安装位置可以灵活调节,因此每一台安装好的驱动装置油门拉线驱动轮角度与柴油机油门角度对应关系并不一致,需要通过标定模式,现场读取油门拉线驱动轮角度与柴油机油门高低怠速的对应关系,并存贮到cpu中央处理及存储单元中,以后每次开机只需要读取它们的关系即可。
16.作为本实用新型优选的方案,所述的电机安装箱包括上盖、外壳,所述的外壳与上盖贴紧端面上设有灌胶密封槽,所述的外壳与油门软轴、出线防水接头接触处设有安装凸台、灌胶密封圈,所述的上盖与外壳贴紧端面上设有与灌胶密封槽配合的灌胶槽压条。
17.作为本实用新型优选的方案,所述的上盖、外壳为铝合金制作。
18.油门驱动装置的使用环境十分恶劣,在发动机仓附近,高温、高尘,下雨时可能一直淋在水中,因此驱动装置的防护十分重要;为了达到一定的抗冲击性,上盖、外壳都采用铝合金压铸,为了让驱动器本体部分能达到ip67的防水等级,在外壳中设计了与上盖密封的灌胶槽,与油门软轴安装孔配合的凸台和灌胶密封圈,与出线防水接头配合的安装孔凸台和灌胶密封圈,在上盖中设计了灌胶槽压条;通过以上措施,达到了ip67的防水等级,并通过了相关检验机构的检验。
19.与现有技术相比,本实用新型的有益效果是:
20.本实用新型结构合理,装置整体采用可靠密封结构,防水等级高,霍尔角度传感器测量采用非接触式的方式,大大增加了测量的可靠性;增加了控制电路和模块,完成了j1939协议的解析,柴油机油门高低怠速位置的标定,柴油机油门位置和速度的闭环控制,油门位置及转速的反馈,外部开关量信号控制自动怠速等功能。
附图说明
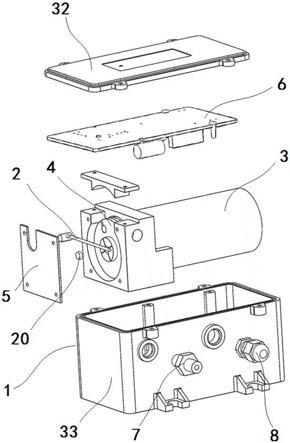
21.图1为本实用新型的一种结构爆炸示意图;
22.图2为本实用新型的旋转角度测量结构示意图;
23.图3为本实用新型的产品行程与传感器输出的关系示意图;
24.图4为本实用新型的电路结构示意图;
25.图5为本实用新型的控制模块结构示意图;
26.图6为本实用新型外壳的密封结构示意图;
27.图7为本实用新型上盖的密封结构示意图。
28.图中:1、电机安装箱2、油门拉线3、驱动电机
29.4、油门拉线驱动轮5、驱动轮旋转角度测量电路板
30.6、控制电路板7、油门软轴8、出线防水接头
31.9、输入调理电路10、can隔离驱动电路
32.11、电源变换电路12、cpu中央处理单元
33.13、电机驱动电路14、角度测量电路15、转速测量电路
34.16、压力开关17、控制器18、转速传感器
35.19、供电系统20、磁钢21、霍尔角度传感器
36.22、io输入模块23、j1939协议解析模块
37.24、柴油机自动怠速控制模块25、数据存储模块
38.26、柴油机油门高低怠速标定模块27、柴油机转速控制模块
39.28、柴油机油门位置控制模块29、油门电机无极双向驱动模块
40.30、油门拉线驱动轮角度检测模块31、柴油机转速测量模块
41.32、上盖33、外壳34、灌胶密封槽35、安装凸台
42.36、灌胶密封圈37、灌胶槽压条。
具体实施方式
43.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
44.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
45.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
46.请参阅图1
‑
7,本实用新型提供一种技术方案:
47.一种基于j1939协议的柴油机油门驱动装置,包括油门驱动装置,油门驱动装置包括电机安装箱1、油门拉线2,电机安装箱1内设有驱动电机3、油门拉线驱动轮4、驱动轮旋转角度测量电路板5、控制电路板6,电机安装箱1还设有油门软轴7、出线防水接头8,油门拉线2一端穿过油门软轴7与油门拉线驱动轮4连接,油门拉线驱动轮4与驱动电机3输出轴一端固定,控制电路板6设有输入调理电路9、can隔离驱动电路10、电源变换电路11、cpu中央处理单元12、电机驱动电路13、角度测量电路14、转速测量电路15,电机驱动电路13与驱动电机3连接,角度测量电路14与驱动轮旋转角度测量电路板5连接,控制电路板6还分别与外部电源、控制器连接;输入调理电路9与外部先导压力梭阀组压力开关16连接,can隔离驱动电路10与外部电喷柴油机型工程机械控制仪表或控制器17连接,电机驱动电路13为pwm桥式电机驱动电路,转速测量电路15与外部柴油机上的转速传感器18连接;电源变换电路11与工程机械供电系统19连接,电源变换电路11输入电压为12v或24v,电源变换电路11输出电压为3.3v、5v和12v;
48.油门拉线驱动轮4中部设有磁钢20,驱动轮旋转角度测量电路板5设于油门拉线驱动轮4外侧且与磁钢20之间设有间隔,驱动轮旋转角度测量电路板5上设有与磁钢20位置配
合的霍尔角度传感器21;驱动轮旋转角度测量电路板5上的霍尔角度传感器21为triaxis三轴霍尔角度传感器,磁钢20与驱动轮旋转角度测量电路板5之间的间隔距离为0.5
‑
2毫米;
49.cpu中央处理单元12包括io输入模块22、j1939协议解析模块23、柴油机自动怠速控制模块24、数据存储模块25、柴油机油门高低怠速标定模块26、柴油机转速控制模块27、柴油机油门位置控制模块28、油门电机无极双向驱动模块29、油门拉线驱动轮角度检测模块30、柴油机转速测量模块31;
50.电机安装箱包括上盖32、外壳33,外壳33与上盖32贴紧端面上设有灌胶密封槽34,外壳33与油门软轴7、出线防水接头8接触处设有安装凸台35、灌胶密封圈36,上盖32与外壳33贴紧端面上设有与灌胶密封槽34配合的灌胶槽压条37;
51.上盖32、外壳33为铝合金制作。
52.具体实施过程是:
53.本方案标定模式工作过程如下,j1939协议解析模块23接收到标定器发来的标定协议后,进入柴油机油门高低怠速标定模块26,柴油机油门高低怠速标定模块26输出油门驱动轮角度从小往大变化信息给柴油机油门位置控制模块28,同时读取柴油机转速测量模块31获得的柴油机转速值,并根据油门拉线驱动轮4角度变化状态和柴油机转速变化状态获得柴油机高低怠速时的油门拉线驱动轮4角度值,并通过数据存储模块25存贮到cpu中央处理及存储单元中。柴油机高低怠速判定规则如下,在油门拉线驱动轮4角度从小往大变化过程中,柴油机转速从基本不变到刚开始增加时的油门拉线驱动轮4角度为低怠速角度,当油门拉线驱动轮4角度测量值一段时间内不再增加,并且柴油机转速测量值在预定高怠速转速附近时,此时油门拉线驱动轮4角度为高怠速角度。
54.本方案运行模式工作过程如下,首先柴油机自动怠速控制模块24,通过读取io输入模块22的先导压力梭阀组压力开关16信号,如果有信号,给柴油机油门位置控制模块28低怠速位置信号,柴油机处于低怠速状态。如果没有信号,根据j1939协议解析模块23获取的柴油机控制模式,如果为油门位置控制模式,则根据j1939命令中的具体位置值和标定得到的高低怠速油门拉线驱动轮4角度计算出当前的油门拉线驱动轮4角度a1,柴油机油门位置控制模块28根据当前的油门拉线驱动轮4角度a1和油门拉线驱动轮角度检测模块30检测的角度值a2,通过pid调节运算,计算出油门拉线驱动电机3的运行速度和方向,控制驱动电机3旋转使a1与a2角度误差在设置范围内,完成柴油机油门位置控制。如果为转速控制模式,则根据j1939命令中的具体转速值s1和柴油机转速测量模块31测得的柴油机实际转速值s2,通过pid调节运算,计算出油门拉线驱动轮角度值a1输入到柴油机油门位置控制模块28,控制油门大小,并最终控制s1与s2在一定的误差范围之内。
55.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1