一种基于相机定向和激光测距的风机净空测量设备的制作方法
1.本实用新型属于激光测量技术领域,具体涉及一种基于相机定向和激光测距的风机净空测量设备。
背景技术:
2.根据中国能源局统计数据显示,2019年中国风电的累计装机容量达到了21005万千瓦,到了2020年上半年,中国新增并网风力发电装机容量达632万千瓦。在可预见未来的能源发展中,风力发电将继续保持强劲的发展势头。
3.然而,随着装机容量的持续增长,近几年新能源开发安全事故屡有发生,风机在风力较强时,风机叶片易发生变形。德国船级社(gl)风电机组设计认证规范规定:风电机组叶尖与塔筒壁的最小距离(即净空),相对于叶片不变形的状态下的距离,在机组运行状态下,不得小于30%,在机组顺桨停机状态下,不得小于5%。为避免叶片与塔柱体相碰造成安全事故的发生,采用激光雷达净空传感器测量风机净空,对风机与塔筒间距进行提前感知预警,避免风险事故的发生。
4.目前行业内用于测量叶片与塔筒净空的做法是在塔筒上靠近叶片下叶尖的位置,沿径向360度布置若干个激光扫描仪,激光扫描仪反复水平扫描,通过实时测量激光与叶片之间的夹角和距离,计算下叶尖与塔筒之间的最小距离。上述技术存在若干个不足,首先,需要布置若干个激光扫描仪,并且激光扫描仪是带角度和距离测量功能的,价格昂贵;其次,激光扫描仪安装高度为下叶尖高度,距离地面最少20米,安装和维护不方便,费用高;最后,由于激光是不断左右扫描运动的,叶片也是运动的,一个运动的物体去测量另一个运动的物体,要求采样频率很高,并且该方法通过测量激光与叶片之间的夹角和距离,实时计算最小距离,数据量很大。同时设备还会受到雨、雾、沙尘、雾霾、低温等极端天气环境的影响,从而使得监测功能失效。
技术实现要素:
5.本实用新型所要解决的技术问题在于克服现有技术的上述不足,提供一种稳定性高,抗干扰能力强,能够完成高精度净空测量任务的基于相机定位和激光测距的风机净空测量设备。
6.其所要解决的技术问题可以通过以下技术方案来实施。
7.一种基于相机定向和激光测距的风机净空测量设备,其特点为:包括一定位于风机机舱底部的底座,所述底座上设置有一两端分别架设在转台支杆上的偏摆轴,所述偏摆轴经一偏摆电机所驱动,所述偏摆轴连接一偏摆平台,所述偏摆平台上安置有照明灯、高速相机和激光测距仪;所述高速相机用于测量风机叶尖与测距仪的方位;所述激光测距仪用于对风机叶尖进行测距,所述偏摆平台用于控制激光测距仪的测距角度以使测距时激光测距仪激光光斑正好打在风机叶尖位置。
8.作为本技术方案的进一步改进,所述激光测距仪的测量频率为mhz级。
9.也作为本技术方案的进一步改进,所述激光测距仪的发射光波长在高速相机的探测器响应波长范围内。
10.作为本实用新型的优选实施例之一,所述照明灯为光强可调的照明灯。
11.更进一步:所述照明灯具有用于感知环境光强度的环境光传感器。
12.同样作为本技术方案的进一步改进,所述高速相机具有轮廓识别功能。
13.也进一步,所述底座设置于塔柱和风机叶片间的风机机舱底部位。
14.采用上述技术方案的基于相机定向和激光测距的风机净空测量设备,其成本低,结构简单,稳定性高,安装使用方便,能够有效地实时监控净空值。进一步,该测量设备具有如下的优点和特点:
15.1、激光测距仪测量频率高,可达mhz(目前线扫描或面扫描方案不超过100hz),响应快,抗干扰能力强,测距远,可适应恶劣环境。
16.2、激光测距仪发射光波长在望远相机探测器响应波长范围内,望远相机能拍摄激光测距仪光斑,并识别测距仪光斑中心在标靶的位置坐标。
17.3、背景光可以根据环境光调节光强,使标靶亮度始终保持在合适的范围内。
附图说明
18.图1为本实用新型风机净空测量设备在风机上的位置示意图;
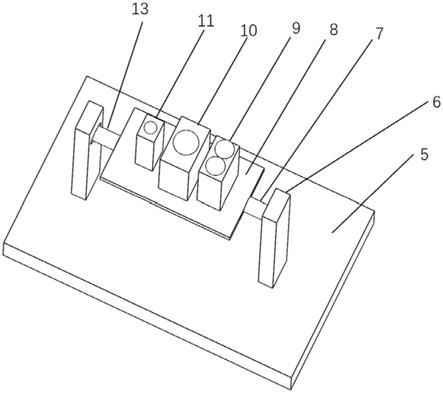
19.图2为本实用新型基于相机定向的激光测距的风机净空测量设备的结构示意图;
20.图3为风机叶尖与塔柱间净空值示意;
21.图中:1、塔柱;2、(风机)机舱;3、测量模块;4、风机叶片;5、底座;6、转台支杆;7、偏摆电机;8、偏摆平台;9、激光测距仪;10、高速相机;11、照明灯;12、风机叶尖;13、偏摆轴。
具体实施方式
22.下面结合附图对本实用新型的具体实施方式进行进一步的详细说明。
23.参照图1至图3,本实用新型提供了一种基于相机定向和激光测距的风机净空测量设备,包括激光测距仪9、高速相机10、电机偏摆台(即偏摆平台8)、照明灯11;高速相机10用于测量风机叶尖12与激光测距仪9的方位,电机偏摆台根据叶尖方位角调整激光测距仪角度,使其对准风机叶尖12测量,激光测距仪9测量风机叶尖12的距离,与激光测距仪的方位角数据一起传送至中央控制系统,通过计算得出风机叶尖12与塔柱1的距离(即图3中的净空值d)。本实用新型结构紧凑,使用相对低廉的成本,完成高精度的净空测量工作,且有较强的抗环境干扰能力。
24.激光测距仪9、高速相机10、照明灯11、底座5、转台支杆6、偏摆电机7、偏摆平台8及偏摆轴13组成测量模块3(参照图2),固定于风机机舱2底部,并位于风机叶片4和塔柱1之间。
25.测量模块3中的底座5通过螺丝固定在风机机舱上;偏摆电机7所控制的偏摆轴13通过转台固定柱(即转台支杆6)固定在底座5上方。偏摆平台8在偏摆电机7带动下摆动一个角度,其摆动角度通过相机测量风机叶尖12与激光测距仪角度决定,使激光测距仪激光光斑正好打在风机叶尖位置。
26.高速相机10的视场覆盖风机叶尖12,精确定位风机叶尖方位,通过偏摆转动台(即
偏摆平台8)使激光测距仪光束处于标靶中心位置,并通过相机测量激光测距仪光斑中心位置检查旋转和偏摆角度是否准确。
27.如图1所示,风机净空测量模块(即测量模块3)安装在机舱下方,随机舱一起转动,实时监控风机叶尖净空值。
28.风机转动时,高速相机测量风机叶尖形状,通过相应的软件识别叶尖相对位置及与测距仪的方位。偏摆电机带动偏摆台调整激光测距仪角度,使其对准风机叶尖测量,激光测距仪测量风机叶尖的距离,与激光测距仪的方位角数据一起传送至控制系统,通过计算得出风机叶尖与塔柱的距离:净空值(如图3所示)。
29.其中,照明灯11用于光线不足时补光,以便高速相机能拍摄风机叶尖,照明灯带有环境光传感器,光强可调,风机叶尖光强始终在合适的范围内。
30.高速相机带轮廓识别功能,响应波长应包括激光测距仪波长,可以拍摄测距仪光斑图像并识别光斑中心位置坐标。
31.高速相机根据测距仪光斑与叶尖轮廓位置判断激光测距仪是否对准叶尖。
32.相机识别测距仪光斑与叶尖轮廓:
33.首先将图像转化为灰度图像,使用最大类间方差法找到图片的一个合适的阈值,然后对图像进行二值化,图像二值化处理后提取光斑边缘轮廓;将轮廓中风机叶尖坐标映射为世界坐标系下的具体坐标值;进一步,可以通过集成在计算机中的中近距激光高精度测量软件进行进一步的处理。
34.激光测距仪距离测量:
35.激光测距仪采用脉冲tof测距方式,使用半导体激光发射器发射红外激光,其中产生的光从风机叶尖反弹并返回到激光雷达(激光测距仪)。根据光的发射与反射后返回激光雷达(激光测距仪)之间的时间差,以测量叶尖与激光雷达(激光测距仪)之间的距离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1