用重构的曲轴信号控制发动机的方法和装置与流程
1.本发明涉及尤其在汽车领域实施的四冲程的内燃发动机的领域。
背景技术:
2.内燃发动机通常由发动机控制单元(ecu)实现,该发动机控制单元能够从各种传感器接收关于发动机状态的信息,并在适当的时间执行控制操作,例如触发燃料喷射或触发火花塞火花。
3.出于性能、效率和污染物排放减少的原因,汽车领域中最近的发动机控制方法需要极其精确地调节发动机控制部件,特别是调节燃料喷射顺序,以及在汽油发动机的情况下调节点火顺序。发动机控制的这种精确性需要非常精确地了解发动机在其四冲程循环中的瞬时位置。知晓了发动机在其循环中的瞬时位置,就有可能在任何时刻知晓相对于诸如点火或燃料喷射的事件的每个活塞的位置。
4.内燃发动机通常包括一个或多个活塞,活塞驱动曲轴旋转,曲轴可旋转地连接到飞轮,该飞轮设有具齿的轮。传感器(例如霍尔效应传感器)通常面向具齿的轮定位,并且当发动机运行时,能够向发动机控制单元传输表示每个齿在传感器前面的经过的信息。该具齿的轮也是不对称的(例如,一个或多个缺失齿),这使得当这种不对称经过时,可以对齿计数策略(或发动机位置计算策略)进行初始化。因此,发动机控制单元具有关于曲轴的瞬时角度位置的信息。
5.因为在这种情况下内燃发动机是四冲程发动机,所以完整的发动机循环(进气、压缩、膨胀、排气)在两次曲轴旋转期间发生。因此,知晓曲轴的角度位置不足以知晓发动机在循环中的精确位置。因此,内燃发动机具有连接到气门的另一个传感器,例如能够将关于气门位置的信息传输到发动机控制单元的凸轮轴传感器。
6.发动机控制单元能够通过结合曲轴传感器和凸轮轴传感器提供的信息,使用通常称为“同步”的操作来精确地确定发动机的瞬时位置。
7.内燃发动机领域的最新发展实现了独立于发动机控制单元被调节的新构件,这需要知晓发动机在其四冲程循环中的精确位置。例如,用于可变气门正时(vvt)的电动装置就是这种情况。以前是液压的这些装置最近已经发展成电动装置,并允许改进对气门运动的控制,以提高发动机性能,减少污染物排放,并减少燃料消耗。驱动这些可变气门正时装置的电动装置由独立于发动机控制单元的气门控制单元调节,并且需要知晓发动机在其四冲程循环中的瞬时位置,以便成功地正时气门。
8.可以在气门控制单元中执行与在发动机控制单元中相同的同步操作,使得气门控制单元本身确定发动机在其循环中的位置。然而,在发动机控制单元中执行一次同步和在气门控制单元中执行额外的同步需要加倍与同步相关的计算操作,并且因此加倍这些计算所需的电子装置,这需要更复杂、更昂贵的发动机控制装置。
9.此外,当所需的精度需要一微秒量级的时间尺度时,同步操作是复杂的。这种同步操作需如下的算法,所述算法在计算资源方面要求高,并且产生虽然精确但在给定的不确
定性范围内给出的结果。因此,在该不确定性范围内,独立执行的两个同步操作将产生非常不同的结果,当这些同步涉及必须完全同步的发动机部件(例如气门和燃料喷射)时,这给发动机的运行带来了风险。
10.因此,两次独立的同步操作(一次在发动机控制单元中,且另一次在气门控制单元中)只有在执行对前两次同步进行平均的第三次同步时才能被执行。这种类型的操作使得所实施的设备和方法更加复杂,并且增加了成本和故障风险。
技术实现要素:
11.本发明的目的是改进现有技术的方法和装置。
12.为此,本发明涉及一种用于控制四冲程的内燃发动机的方法,该内燃发动机包括用于检测凸轮轴的角度位置的第一传感器和用于检测与曲轴相关联的具齿的轮的齿的经过的第二传感器,所述方法包括基于由所述传感器提供的信息确定发动机在其四冲程循环中的瞬时位置的步骤,所述方法还包括产生重构的曲轴信号的步骤,所述重构的曲轴信号包括在沿着发动机的标称旋转方向的两次曲轴旋转上扩展的电信号,所述电信号包括:
‑ꢀ
单个主脉冲,所述单个主脉冲具有预先确定的第一持续时间,所述单个主脉冲对应于与曲轴相关联的具齿的轮的预先确定的基准齿的经过;
‑ꢀ
多个次级脉冲,次级脉冲具有预先确定的第二持续时间,每个次级脉冲对应于与曲轴相关联的具齿的轮的齿的经过;预先确定的第一持续时间大于预先确定的第二持续时间。
13.根据另一个目的,本发明涉及一种能够实施上述方法的发动机控制装置,并且包括:
‑ꢀ
发动机控制单元,所述传感器连接到所述发动机控制单元;
‑ꢀ
专用于发动机的一个构件的控制单元;
‑ꢀ
通信总线,其将发动机控制单元连接到专用的控制单元,并且能够传输重构的曲轴信号。
14.专用的控制单元可以是电动的可变气门正时控制单元。
15.根据本发明的方法和装置给发动机控制功能增加了功能。根据本发明,重构的曲轴信号单独包含了提供发动机在其四冲程循环中的精确瞬时位置的所有信息。
16.本发明使得可以在发动机控制单元中仅执行一次传感器同步操作,并且使得可以以直接可使用的形式将结果提供给任何其他附加的发动机控制单元,即使对于高速运行的发动机也是如此。该附加的控制单元不需要访问传感器,并且需要很少的计算资源来提取以重构的曲轴信号的形式呈现的信息。
17.本发明特别适用于复杂的发动机,该发动机具有如下的构件:这些构件带有呈附加的控制单元形式(例如前述的电动的可变气门正时装置)的它们自身的嵌入式电子控制装置。由于本发明,这种发动机简单地包括发动机控制单元和附加的控制单元之间的通信总线,所述总线传输重构的曲轴信号。从附加的控制单元的角度来看,通信总线模拟由虚拟传感器提供的信息,该虚拟传感器以重构的曲轴信号的形式直接提供关于发动机在其四冲程循环中的实际瞬时位置的信息,而不需要同步。
18.因此,本发明使得可以简化发动机控制单元之外的所有部件的电子器件和编程,
从而改善成本、可靠性和机载重量。所有这些部件接收来自单个唯一同步操作的位置信息,这增加了一起工作的发动机构件的操作可靠性。
19.根据本发明的方法可以包括以下单独或组合的附加特征:
‑ꢀ
在沿着发动机的标称旋转方向的两次曲轴旋转期间,其中重构的曲轴信号在两次曲轴旋转上扩展,基准齿在第二传感器的前面经过两次,针对所述经过中的一次产生单个主脉冲,并且针对所述经过中的另一次产生次级脉冲;
‑ꢀ
与曲轴相关联的具齿的轮包括无齿间隙,并且预先确定的基准齿与该无齿间隙相邻;
‑ꢀ
如果发动机沿其相反的旋转方向运行,在沿着相反方向的两次曲轴旋转上,重构的曲轴信号的电信号包括:具有预先确定的第三持续时间的单个修改的主脉冲,其对应于预先确定的基准齿沿发动机的相反旋转方向的经过;多个修改的次级脉冲,每个修改的次级脉冲具有预先确定的第四持续时间,每个修改的次级脉冲对应于曲轴齿沿发动机的相反旋转方向的经过;预先确定的第三持续时间大于预先确定的第四持续时间;
‑ꢀ
预先确定的第四持续时间大于预先确定的第二持续时间;
‑ꢀ
重构的曲轴信号的电信号组合了包括对应于发动机沿标称旋转方向运行的次级脉冲的信号段,以及包括对应于发动机沿相反旋转方向运行的修改的次级脉冲的信号段;
‑ꢀ
基于由所述传感器提供的信息确定发动机在其四冲程循环中的瞬时位置的步骤由发动机控制单元执行,所述传感器连接到所述发动机控制单元;并且重构的曲轴信号由通信总线传输到专用于发动机的一个构件的控制单元;
‑ꢀ
专用的控制单元通过从单个主脉冲开始计数重构的曲轴信号的次级脉冲的数目来确定发动机在其四冲程循环中的位置。
附图说明
20.本发明的进一步特征和优点将从以下参考附图的非限制性描述中变得显而易见,其中:[图1]图1是设有根据本发明的装置的内燃发动机的示意图;[图2]图2是示出根据本发明第一实施例的方法的第一视图;[图3]图3是示出根据本发明第一实施例的方法的第二视图;[图4]图4示出了根据本发明第二实施例的方法。
具体实施方式
[0021]
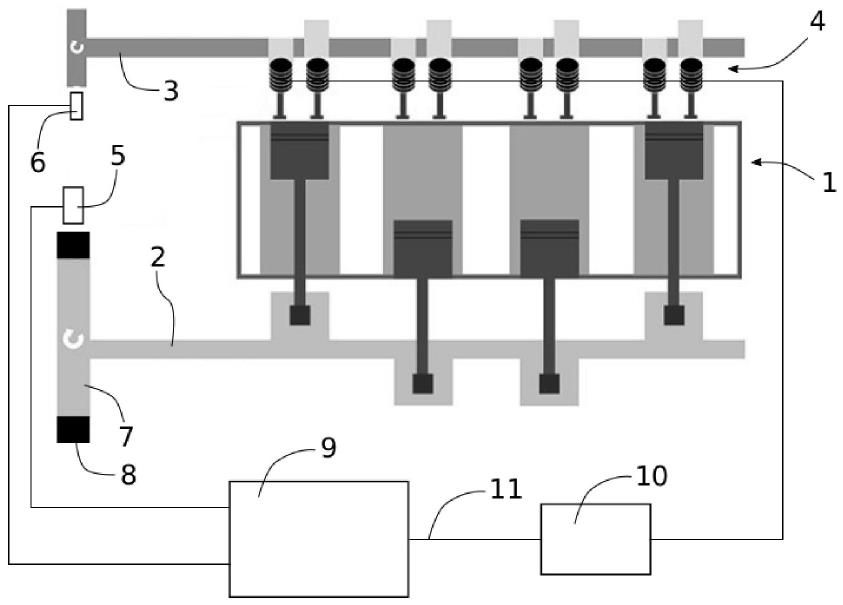
图1是在四冲程发动机循环中运行的四冲程的内燃发动机1的示意图。这种车辆发动机包括由活塞1使之旋转的曲轴2,以及驱动发动机气门4的凸轮轴3。
[0022]
为了调节燃料喷射装置、点火装置(用于汽油发动机)或任何其他附加功能(例如自动发动机停止和启动),需要精确知晓所述发动机的瞬时位置。发动机的所述瞬时位置是基于曲轴传感器5和凸轮轴传感器6来确定的。传感器5、6是已知的传感器,且这里将不再对其进行详细描述。传感器5、6与发动机的所有其他传感器和控制构件(未示出)一起连接到发动机控制单元9。
[0023]
在该示例中,曲轴2连接到飞轮7,飞轮7的圆周与具齿的轮8相关联。具齿的轮7包括一个或多个缺失齿,以便使飞轮7旋转不对称并产生角度物理基准。
[0024]
凸轮轴传感器6使得可以确定凸轮轴3的角度位置。曲轴传感器5使得可以检测飞轮7的每个齿的经过。传感器5还能够检测对应于缺失齿的间隙,并从该物理基准开始初始化计数器,使得在一次完整的曲轴旋转之后,曲轴传感器5能够确定曲轴2的角度位置。
[0025]
众所周知,发动机控制单元9能够执行同步操作,使得能够映射来自两个传感器5、6的信息,以便确定发动机的瞬时位置。由于信息是由传感器5、6提供的,所以同步是连续进行的。
[0026]
在该示例中,发动机设有电动的可变气门正时装置,该电动的可变气门正时装置包括电动致动器,其插置在凸轮轴3和气门4之间,使得可以调节这些气门4的致动。所述可变气门正时装置在气门控制单元10中包括其自身的控制电子设备,在该示例中,气门控制单元10与发动机控制单元9物理分离。
[0027]
气门控制单元10还需要发动机瞬时位置的精确信息以便操作。
[0028]
发动机控制单元9和气门控制单元10通过通信总线11连接,通过该通信总线11传输关于已经在发动机控制单元9中发生的同步操作的信息,使得气门控制单元10可以接收该信息。
[0029]
发动机控制单元9将被称为“重构的曲轴信号”的电信号传输到气门控制单元10。这里,重构的曲轴信号对应于对信息进行模拟的信号,其将由能够直接且明确地测量发动机在其循环中的位置的虚拟信号传输。所述重构的曲轴信号对于具齿的轮8的在传感器5的前面经过的每个齿包括一个电脉冲。除了所述脉冲中的对应于基准齿的一个脉冲之外,所述脉冲都具有相同的预先确定的持续时间,所述脉冲中的对应于基准齿的一个脉冲比其它脉冲长,并且仅当所述基准齿在在四冲程发动机的完整循环上扩展的两次曲轴旋转中的一次期间经过时出现。
[0030]
换言之,在完整的四冲程循环(持续两次曲轴旋转)期间,被选作基准齿的齿在传感器5前面经过两次,并且这些经过中只有一次经过生成长的脉冲。
[0031]
图2和图3示意性地示出了具齿的轮8的一部分,其呈扁平状展示。这些图均示出了相同的六齿部分:图2示出了在循环的第一次曲轴旋转期间,该部分在传感器5的前面经过;图3示出了在该循环的第二次曲轴旋转期间,同一部分在传感器5的前面经过。
[0032]
所示具齿的轮8的部分包括六个齿d1至d6,以及对应于两个缺失齿的间隙r,该间隙构成具齿的轮8上的标记或物理标志。
[0033]
由发动机控制单元9实时执行同步,并且在齿d1至d6中的每一个在传感器5的前面经过的时刻,发动机控制单元9知晓发动机在其四冲程循环中的位置。
[0034]
具齿的轮8中的一个齿被选择作为实施该方法的基准齿。在本说明性示例中,齿d4被选为基准齿。所述基准齿不涉及发生在发动机控制单元9内的同步操作,并且仅涉及产生重构的曲轴信号,当执行所述同步操作时,该重构的曲轴信号被传输到单元10。
[0035]
图2和图3示出了传输到模块10的重构的曲轴信号12,该重构的曲轴信号与具齿的轮8的齿的经过相映射。在该示例中,重构的曲轴信号12包括由传感器5感测的在具齿的轮8的齿的每个上升沿触发的脉冲。在发动机控制单元9中,每次检测到齿的上升沿时,发动机控制单元9在通信总线11上发送脉冲,该脉冲的持续时间从以下两个预先确定的持续时间
中选择:对应于主脉冲ip的第一持续时间和对应于次级脉冲is的第二持续时间。
[0036]
完整的重构的曲轴信号12在沿着发动机的标称旋转方向的两次曲轴旋转上扩展,且因此包括电信号,该电信号具有:
‑ꢀ
长的单个主脉冲ip,其对应于基准齿d4的第一次经过;
‑ꢀ
短的次级脉冲is,用于其他齿的每次经过和基准齿的第二次经过。
[0037]
在该示例中,单个主脉冲的持续时间是60
ꢀµ
s,次级脉冲的持续时间是45
ꢀµ
s。
[0038]
总之,发动机控制单元9被编程为在重构的曲轴信号12的构造的背景下,在总线11上针对具齿的轮8的所有齿和基准齿d4的一次经过产生45
ꢀµ
s脉冲(第二预先确定的持续时间),并针对基准齿d4的另一次经过产生60
ꢀµ
s脉冲(第一预先确定的持续时间)。该重构的曲轴信号在对应于四冲程发动机循环的两次曲轴旋转上扩展,并且在每个循环中重复。
[0039]
接收该重构的曲轴信号12的气门控制单元10可以确定发动机在其四冲程循环中的位置,除了所述信号12之外不具有任何外部信息。
[0040]
实际上,单个主脉冲ip使得可以建立初始化基准,其允许气门控制单元10从所述初始化基准开始对齿进行计数。由于针对每个循环有单个主脉冲ip,也就是说,在两次曲轴旋转上,这个初始化基准对于四冲程发动机的完整循环是有效的。
[0041]
可选地,当发动机控制单元9还没有执行同步操作或者同步已经丢失时,重构的曲轴信号12仅包括次级脉冲is。没有接收到主脉冲ip使得可以向气门控制单元10指示同步不存在或已经丢失。
[0042]
根据优选实施例,基准齿(在该示例中为d4)被选择为与无齿间隙r相邻。在该示例中,基准齿d4沿着发动机的标称旋转方向紧随该间隙r。因此,与重构的曲轴信号12的构造相关的基准点恰好出现在与发动机控制单元9的同步操作相关的基准点之后,从而限制了误差。
[0043]
因此,控制单元10从发动机控制单元9接收信息,允许其通过计数每个循环的单个主脉冲ip之后的次级脉冲is的数量,直接确定发动机在其四冲程循环中的瞬时位置。该信息由控制单元10接收,而无需连接到任何传感器,且也无需执行同步操作。只有重构的曲轴信号12(即包含少量数据的电信号)通过通信总线11,从而需要可忽略的计算和带宽资源。
[0044]
实际上,气门控制单元10可以包括用于读取重构的曲轴信号12的简单装置,类似于用于读取由传感器传输的信号的装置。信号12的每个脉冲可以与阈值(例如,根据上述示例,45
ꢀµ
s至50
ꢀµ
s)进行比较。持续时间低于该阈值的所有接收到的脉冲被识别为次级脉冲,因此对应于常规齿的经过,并且大于该阈值的每个脉冲将被识别为循环的单个主脉冲,其对应于在相应的两次曲轴旋转之一中预先确定的基准齿的经过。
[0045]
例如,气门控制单元10仅需要在每个单个主脉冲上重置的增量计数器。计数器在每经过一齿时递增。
[0046]
图4示出了具有相同附图标记的本发明的第二实施例。该图类似于图2和图3,示出了具齿的轮8的部分,其呈扁平状展示。重构的曲轴信号12也示意性地映射在具齿的轮8的部分上。
[0047]
根据该第二实施例,发动机控制单元9能够区分发动机沿其标称旋转方向运行的情况和发动机沿相反方向运行的情况,这有时发生在例如发动机关闭时。
[0048]
在这种配置中,曲轴和凸轮轴传感器5、6以及发动机控制单元9的同步装置能够一
起确定发动机的旋转方向。传感器和用于使用它们的装置是已知的,这里将不再详细描述。应当简单地记住的是,发动机控制单元9因此具有可用于指示具齿的轮8的每个齿的经过以及与该齿的经过相关联的发动机旋转方向的数据。
[0049]
齿d7至d9的部分在图4的示例中示出。在该第二实施例中,重构的曲轴信号的每个脉冲在每个齿的下降沿产生。这具有允许发动机控制单元9通过比较每个齿的上升沿和下降沿来执行同步和确定发动机旋转方向的效果。因此,在齿的下降沿处知晓全部信息(齿的经过和旋转方向)。
[0050]
在图4的示例中,图的第一部分示出了三个齿d7至d9沿着发动机的标称旋转方向在传感器5的前面经过,直到事件13,在事件13期间,发动机的旋转方向反向。该图的第二部分示出了齿d7至d9沿相反方向的经过,直到第二事件14,在该事件中,发动机的旋转方向反向,从而返回到发动机的标称旋转方向。该图的第三部分示出了齿d7至d9再次沿标称旋转方向在曲轴传感器5的前面经过。
[0051]
在这个示意性的时间配置中,为了描述的目的已经被简化,重构的曲轴信号12将具有图4所示的轮廓。在该示例中,预先确定的基准齿是齿d9。在此,信号12按时间顺序包括:
‑ꢀ
次级脉冲,其具有预先确定的第二持续时间,这里为45
ꢀµ
s,当齿d7的下降沿在曲轴传感器5的前面经过时则被触发;
‑ꢀ
45
ꢀµ
s的次级脉冲,其对应于齿d8沿着发动机的标称旋转方向在传感器5的前面经过;
‑ꢀ
60
ꢀµ
s的主脉冲ip,其对应于基准齿d9在曲轴传感器5的前面经过;
‑ꢀ
修改的主脉冲ipm,其对应于基准齿d9沿着与发动机的标称旋转方向相反的方向经过。该修改的主脉冲ipm具有预先确定的第三持续时间,这里为105
ꢀµ
s;
‑ꢀ
修改的次级脉冲ism,其对应于齿d8沿着相反的旋转方向经过,所述脉冲ism具有预先确定的第四持续时间,这里为90
ꢀµ
s;
‑ꢀ
90
ꢀµ
s的修改的次级脉冲ism,其对应于齿d7沿着相反的旋转方向经过;
‑ꢀ
45
ꢀµ
s的次级脉冲,其对应于齿d7沿着发动机的标称旋转方向再次经过;
‑ꢀ
45
ꢀµ
s的次级脉冲,其对应于齿d8沿着发动机的标称旋转方向在传感器5的前面经过;
‑ꢀ
60
ꢀµ
s的主脉冲ip,其对应于基准齿d9沿着发动机的标称旋转方向在曲轴传感器5的前面经过。
[0052]
针对每个循环(也就是说,在沿着一个旋转方向的两次曲轴旋转上)有单个主脉冲。
[0053]
在该第二实施例中,当发动机沿着其标称旋转方向运行时,重构的曲轴信号的构成与第一实施例相同。然而,当发动机沿着相反方向运行时,该第二实施例在通信总线11上增加了由发动机控制单元9提供的信息。当发动机沿着与其标称旋转方向相反的方向运行时,具齿的轮8的齿的每一次经过则在重构的曲轴信号12中为具齿的轮8的除了基准齿(这里为d9)之外的所有齿产生修改的次级脉冲ism,对于基准齿,在四冲程发动机循环的沿着相反方向的两次曲轴旋转期间,仅针对基准齿的一次经过产生单个修改的主脉冲ipm。
[0054]
当然,发动机沿着相反方向作出两次曲轴旋转的可能性很小。该概述旨在描述当
发动机沿着相反方向运行时该方法的操作:该方法产生重构的曲轴信号,该信号的某些部分对应于沿着相反方向的旋转,并且这些部分包括比主脉冲和次级脉冲更长的修改的次级脉冲ism,以及单个修改的主脉冲ipm。同样,这种修改的主脉冲被认为是在两次曲轴旋转上的单个脉冲。尽管发动机不可能沿着相反方向连续运转,但是如果它确实发生了(例如,变速箱在第一档,而车辆在斜坡上倒车),则根据本发明的方法仍然适用。
[0055]
换言之,在通信总线11上传输的电信号可以包括:
‑ꢀ
对应于发动机沿着其标称旋转方向运行的部分,其中有单个主脉冲ip和次级脉冲is,如第一实施例所述;
‑ꢀ
对应于发动机沿相反旋转方向运行的部分,也具有修改的主脉冲ipm和修改的次级脉冲ism(在两次曲轴旋转上,即使它们实际上不发生)。
[0056]
根据该第二实施例,气门控制单元10不仅接收关于发动机沿着其标称旋转方向运行时的瞬时位置的信息,而且当发动机沿着相反方向运行时,气门控制单元10可获得该信息。所述信息用电信号传输,该电信号具有与第一实施例相同的简单程度。气门控制单元10简单地识别四个不同的脉冲持续时间(可选地使用阈值),这因此允许它识别齿沿一个方向和沿另一个方向的经过,从而可以从基准齿对齿进行计数。
[0057]
在不脱离本发明的范围的情况下,可以实现该方法的不同实施例。例如,预先确定的第一、第二、第三和第四持续时间可以具有与这里作为示例给出的不同的值;重要的是,所有这些脉冲持续时间必须短于一个齿的通过和下一个齿的通过之间的时间段,以便电信号的脉冲持续时间是清楚地可区分的。
[0058]
重构的曲轴信号可以被传输到任何类型的发动机装置,该发动机装置包括其自己的控制电子设备并且需要知晓发动机的瞬时位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1