用于风力发电机组的偏航监控系统及其方法与流程
1.本发明实施例涉及风力发电技术领域,尤其涉及一种用于风力发电机组的偏航监控系统及其方法。
背景技术:
2.随着煤炭、石油等能源的逐渐枯竭,人类越来越重视可再生能源的利用。风能作为一种清洁的可再生能源越来越受到世界各国的重视。伴随着风电技术的不断发展,风机在电力系统中的应用日益增加。风力发电机组是将风能转化为电能的大型设备,通常设置于风能资源丰富的地区。
3.获取风力发电机组准确的偏航位置对风力发电机组控制和安全运行至关重要。目前,在采用扭缆角度采集器进行机舱位置测量的基础上,也因校正角度的需求出现了通过增加一个接近开关获取机舱旋转整数圈时产生的触发信号的技术,这个方法在机舱旋转一周或数周时接近开关被触发,产生触发信号,此时,将扭缆角度采集器获得的偏航角度数值与记录的接近开关初始位置角度数值进行对比,获得角度误差值,并对该角度误差值进行修正,从而实现角度校正的功能。
4.然而,该技术只能获得机舱旋转了整数圈的信息,而无法获得准确的机舱旋转圈数和旋转方向,因此存在角度校正错误的可能性,尤其是在扭缆角度采集器因为干扰、接线松动等情况下获得到的偏航角度数值可能会出现错乱,无法实现准确的自动角度校正,而且,可能会导致扭缆超限等危险情况的出现,带来极大的运行安全风险。
技术实现要素:
5.本发明实施例的目的在于提供一种用于风力发电机组的偏航监控系统及其方法,能够对扭缆角度采集器进行精确的监控。
6.本发明实施例的一个方面提供一种用于风力发电机组的偏航监控系统。所述偏航监控系统包括主控制器、扭缆角度采集器及至少两组接近开关装置。所述扭缆角度采集器安装于所述风力发电机组的机舱上并与所述主控制器连接,用于获取所述机舱的实时偏航角度。所述至少两组接近开关装置安装于所述机舱上,每组所述接近开关装置包括一个接近开关和与所述接近开关相配合的对位触发部件,所述接近开关与所述主控制器连接,所述对位触发部件用于在与任一所述接近开关对位时触发所述接近开关闭合。其中,所述主控制器用于接收来自所述至少两组接近开关装置中的所述接近开关产生的信号时序,并且,基于所述接近开关产生的所述信号时序来监控所述扭缆角度采集器获取的所述实时偏航角度是否有异常。
7.本发明实施例的另一个方面还提供一种用于风力发电机组的偏航监控方法。所述方法包括:通过安装于风力发电机组的机舱上的扭缆角度采集器来获取所述机舱的实时偏航角度;接收来自安装于所述机舱上的至少两组接近开关装置中的接近开关产生的信号时序,其中,每组所述接近开关装置包括一个所述接近开关和与所述接近开关相配合的对位
触发部件,所述对位触发部件用于在与任一所述接近开关对位时触发所述接近开关闭合;以及基于所述接近开关产生的所述信号时序来监控所述扭缆角度采集器获取的所述实时偏航角度是否有异常。
8.本发明一个或多个实施例的用于风力发电机组的偏航监控系统及其方法通过设置至少两组接近开关装置,并且,可以基于至少两组接近开关装置中的接近开关所产生的信号时序来监控扭缆角度采集器获取的实时偏航角度是否有异常,从而能够对扭缆角度采集器进行精确的监控,确保扭缆角度采集器获取的实时偏航角度的准确性。
附图说明
9.图1为一种风力发电机组的示意图;
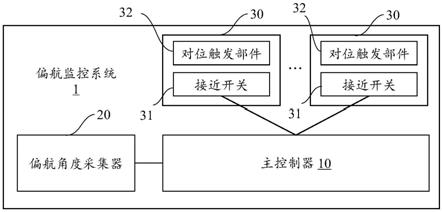
10.图2为本发明一个实施例的用于风力发电机组的偏航监控系统的示意性框图;
11.图3为本发明一个实施例的安装两组接近开关装置的俯视示意图;
12.图4为本发明另一个实施例的安装三组接近开关装置的俯视示意图;
13.图5为在图3所示安装两组接近开关装置的情况下偏航过程中扭缆角度与接近开关产生的信号时序的对应关系图;
14.图6为在图4所示安装三组接近开关装置的情况下顺时针偏航两周过程中扭缆角度与接近开关产生的信号时序的对应关系图;
15.图7为在图4所示安装三组接近开关装置的情况下逆时针偏航两周过程中扭缆角度与接近开关产生的信号时序的对应关系图;
16.图8为本发明一个实施例的用于风力发电机组的偏航监控方法的流程图。
具体实施方式
17.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施例并不代表与本发明相一致的所有实施例。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置的例子。
18.在本发明实施例使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。除非另作定义,本发明实施例使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本发明说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
19.图1揭示了一种风力发电机组100的立体示意图。如图1所示,风力发电机组100包括多个叶片101、机舱102、轮毂103及塔筒104。塔筒104从基础(未图示)向上延伸,机舱102安装在塔筒104的顶端,轮毂103安装在机舱102的一端,多个叶片101安装在轮毂103上。
20.本发明实施例提供了一种用于风力发电机组100的偏航监控系统1。图2揭示了本发明一个实施例的用于风力发电机组100的偏航监控系统1的示意性框图。如图2所示,本发明一个实施例的用于风力发电机组100的偏航监控系统1包括主控制器10、扭缆角度采集器20以及至少两组接近开关装置30。扭缆角度采集器20安装于风力发电机组100的机舱102上并与主控制器10连接,扭缆角度采集器20可以用来获取机舱102的实时偏航角度。
21.至少两组接近开关装置30安装于机舱102上,机舱102包括例如可连接至塔筒104的固定部及例如可连接至轮毂103并可相对于固定部旋转的转动部。每组接近开关装置30包括一个接近开关31及与该接近开关31相配合的对位触发部件32。在一个实施例中,接近开关31可以安装于机舱102的固定部上,而对位触发部件32可以安装于机舱102的转动部上。对位触发部件32例如可以为一种金属触发件,对位触发部件32在与任一接近开关31对位时可以触发该接近开关31闭合。接近开关31与主控制器10连接,当接近开关31被对位触发部件32触发闭合时,接近开关31可以向主控制器10反馈闭合的信号。
22.主控制器10可以接收来自至少两组接近开关装置30中的接近开关31产生的信号时序,并且,可以基于接近开关31产生的信号时序来监控扭缆角度采集器20获取的实时偏航角度是否有异常。
23.本发明实施例的用于风力发电机组100的偏航监控系统1通过设置两组及两组以上的接近开关装置30,从而能够对扭缆角度采集器20进行精确的监控,确保了扭缆角度采集器20获取的实时偏航角度的准确性。
24.在一些实施例中,在机舱102上安装的至少两组接近开关装置30中,相邻两组接近开关装置30中的至少部分的安装间隔角度不得同时等于360度除以接近开关装置30的个数所得到的度数,从而能够确保在不同的扭缆角度可以接收到不同的信号时序。
25.在一个实施例中,本发明实施例的偏航监控系统1可以在机舱102上安装两组接近开关装置30。图3揭示了本发明一个实施例的安装两组接近开关装置30的俯视示意图。如图3所示,在机舱102上分别安装两组接近开关装置30,将较左侧接近开关装置30安装在机舱102位置点记为a,较右侧接近开关装置30安装在机舱102位置点记为b,其中,机舱102位置点a处的接近开关装置30与扭缆零度之间的夹角为α,机舱102位置点b处的接近开关装置30与扭缆零度之间的夹角为β,其中,机舱102位置点a处的接近开关装置30与机舱102位置点b处的接近开关装置30之间的安装间隔角度α+β≠180度。
26.在另一个实施例中,本发明实施例的偏航监控系统1可以在机舱102上安装三组接近开关装置30。图4揭示了本发明另一个实施例的安装三组接近开关装置30的俯视示意图。如图4所示,在机舱102上分别安装三组接近开关装置30,将较左侧接近开关装置30安装在机舱102位置点记为a,之间的接近开关装置30安装在机舱102位置点记为b,较右侧接近开关装置30安装在机舱102位置点记为c,其中,机舱102位置点a处的接近开关装置30与扭缆零度之间的夹角为α,机舱102位置点b处的接近开关装置30与扭缆零度之间的夹角为β,机舱102位置点b处的接近开关装置30与机舱102位置点c处的接近开关装置30之间的安装间隔角度为γ,其中,机舱102位置点a处的接近开关装置30与机舱102位置点b处的接近开关
装置30之间的安装间隔角度α+β、及机舱102位置点b处的接近开关装置30与机舱102位置点c处的接近开关装置30之间的安装间隔角度γ不得同时等于360度除以3,即α+β≠γ≠120度。
27.当然,本发明实施例的用于风力发电机组100的偏航监控系统1并不局限于包括两组或三组接近开关装置30,在其他实施例中,偏航监控系统1还可以包括更多组接近开关装置30。
28.在机舱102偏航的过程中,随着机舱102的偏航旋转,安装在机舱102的转动部上的对位触发部件32随之旋转,当某一对位触发部件32旋转到与任意一个接近开关31对位时,则此时,该对位触发部件32将会触发该接近开关31闭合,该接近开关31将会向主控制器10反馈其闭合的信号。
29.主控制器10可以接收来自接近开关31产生的信号时序,并且,可以基于接近开关31产生的信号时序来确定机舱102的偏航方向和扭缆角度。
30.以下将结合图示来详细描述本发明实施例的偏航监控系统1中的主控制器10是如何根据至少两组接近开关装置30中的接近开关31产生的信号时序来确定机舱102的偏航方向和扭缆角度。
31.图5揭示了在图3所示安装两组接近开关装置30的情况下偏航过程中扭缆角度与接近开关31产生的信号时序的对应关系图。如图5所示,先从扭缆0度开始顺时针偏航720度(图5中的5a所示),再逆时针偏航返回到扭缆0度(图5中的5b所示)。在图5中,a和b处对应的信号“1”表示接近开关31被对位触发部件32触发闭合,接近开关31反馈闭合的信号;信号“0”表示接近开关31未被触发。如图5中的5a所示,例如,在初始扭缆角度为0度时,两组接近开关装置30中的对位触发部件32均与其接近开关31相对位,因此,此时机舱102位置点a和b处的接近开关31均被触发,机舱102位置点a和b处的接近开关31均向控制器反馈闭合的信号“1”。当机舱102顺时针偏航旋转,扭缆角度位于(0,α+β)开区间内时,则两组接近开关装置30中的对位触发部件32均不与任一接近开关31相对位,机舱102位置点a和b处的接近开关31均未被触发,因此,机舱102位置点a和b处的接近开关31的信号保持“0”。当机舱102继续顺时针偏航旋转到扭缆角度恰好等于(α+β)度时,则此时,机舱102位置点b处的接近开关31被触发,机舱102位置点b处的接近开关31向控制器反馈闭合的信号“1”,而机舱102位置点a处的接近开关31未被触发,机舱102位置点a处的接近开关31的信号仍然保持“0”。以此类推,当扭缆角度等于(360-α-β)度时,则机舱102位置点a处的接近开关31的信号为“1”,而机舱102位置点b处的接近开关31的信号为“0”。当扭缆角度等于360度时,则机舱102位置点a和b处的接近开关31的信号均为“1”。当继续顺时针偏航至扭缆角度等于720度时,则机舱102位置点a和b处的接近开关31的信号也均为“1”。然后,需要逆时针偏航返回。如图5中的5b所示,此时,扭缆角度为-720度时,则机舱102位置点a和b处的接近开关31均被触发,机舱102位置点a和b处的接近开关31均向控制器反馈闭合的信号“1”。以此类推,当扭缆角度等于-(720-α-β)度时,则机舱102位置点b处的接近开关31的信号为“1”,而机舱102位置点a处的接近开关31的信号为“0”。当扭缆角度等于-(360+α+β)度时,则机舱102位置点机舱102位置点a处的接近开关31的信号为“1”,而机舱102位置点b处的接近开关31的信号为“0”。当扭缆角度等于-360度时,则机舱102位置点a和b处的接近开关31的信号均为“1”。接着,继续逆时针偏航返回至扭缆0度,此时,机舱102位置点a和b处的接近开关31的信号也均为“1”。
32.以上是以偏航720度为例来对扭缆角度与接近开关31产生的信号时序进行示意性说明。然而,本发明实施例并不局限于720度,本发明实施例可以扭缆0度为偏航的起点,可以先顺时针偏航任意角度后再逆时针偏航返回至扭缆0度,或者,也可以先逆时针偏航任意角度后再顺时针偏航返回至扭缆0度,可以在任意角度往复偏航,扭缆角度在正负之间变动。
33.根据图5给出的对应关系,以下列举出几种不同机舱102位置偏航动作后(假定均从扭缆角度为0度开始),对应的接近开关31产生的信号时序与扭缆角度的位置关系。
34.表1.1示出了机舱102从扭缆零位开始,持续保持顺时针旋转超过(α+β)角度后,再逆时针回转到扭缆零位,接近开关31产生的信号时序与扭缆角度的位置关系。
35.表1.1
36.序列号ab扭缆角度11102000~(α+β)301α+β400(α+β)~05110
37.表1.2示出了机舱102从扭缆零位开始,持续保持顺时针旋转超过(360-α-β)角度后再逆时针回转到扭缆零位,接近开关31产生的信号时序与扭缆角度的位置关系。
38.表1.2
39.序列号ab扭缆角度11102000~(α+β)301(α+β)400(α+β)~(360-α-β)501360-α-β600(360-α-β)~(α+β)7110
40.表1.3示出了机舱102从扭缆零位开始,先保持顺时针旋转超过(α+β)角度后,再逆时针旋转至超过-(α+β)角度,接近开关31产生的信号时序与扭缆角度的位置关系。
41.表1.3
42.序列号ab扭缆角度11102000~(α+β)301α+β400(α+β)~051106000~-(α+β)710-(α+β)
43.表1.4示出了机舱102保持顺时针旋转一圈,接近开关31产生的信号时序与扭缆角度的位置关系。
44.表1.4
45.序列号ab扭缆角度11102000~(α+β)301α+β400(α+β)~(360-α-β)510360-α-β600360-α-β~360711360
46.表1.5示出了机舱102保持逆时针旋转一圈,接近开关31产生的信号时序与扭缆角度的位置关系。
47.表1.5
48.序列号ab扭缆角度11102000~-(α+β)310-(α+β)400-(α+β)~-(360-α-β)501-(360-α-β)600-(360-α-β)~-360711-360
49.表1.6示出了机舱102顺时针旋转两圈,接近开关31产生的信号时序与扭缆角度的位置关系。
50.表1.6
51.序列号ab扭缆角度11102000~(α+β)301α+β400(α+β)~(360-α-β)510360-α-β600360-α-β~360711360800360~(360+α+β)901α+β+3601000(α+β+360)~(720-α-β)1110720-α-β1200720-α-β~720
1311720
52.表1.7示出了机舱102逆时针旋转两圈,接近开关31产生的信号时序与扭缆角度的位置关系。
53.表1.7
54.序列号ab扭缆角度11102000~-(α+β)310-(α+β)400-(α+β)~-(360-α-β)501-(360-α-β)600-(360-α-β)~-360711-360800-360~-(360+α+β)910-(360+α+β)1000-(α+β+360)~-(720-α-β)1101-(720-α-β)1200-(720-α-β)~-7201311-720
55.图6揭示了在图4所示安装三组接近开关装置30的情况下顺时针偏航两周过程中扭缆角度与接近开关31产生的信号时序的对应关系图,其中,图6中的6a示出从扭缆0度顺时针偏航一周时的关系图,图6中的6b示出从一周顺时针偏航两周时的关系图。在图6中,a、b和c处对应的信号“1”表示接近开关31被对位触发部件32触发闭合,接近开关31反馈闭合的信号;信号“0”表示接近开关31未被触发。如图6中的6a所示,例如,在初始扭缆角度为0度时,机舱102位置点a、b和c处的接近开关31均被触发,机舱102位置点a、b和c处的接近开关31均向控制器反馈闭合的信号“1”。当机舱102顺时针偏航旋转,扭缆角度位于(0,γ)开区间内时,则三组接近开关装置30中的对位触发部件32均不与任一接近开关31相对位,机舱102位置点a、b和c处的接近开关31均未被触发,因此,机舱102位置点a、b和c处的接近开关31的信号均保持“0”。当机舱102继续顺时针偏航旋转到扭缆角度恰好等于γ度时,则此时,机舱102位置点c处的接近开关31被触发,机舱102位置点c处的接近开关31向控制器反馈闭合的信号“1”,而机舱102位置点a和b处的接近开关31未被触发,机舱102位置点a和b处的接近开关31的信号仍然保持“0”。以此类推。当继续顺时针偏航一周至扭缆角度等于360度时,机舱102位置点a、b和c处的接近开关31均被触发,机舱102位置点a、b和c处的接近开关31均向控制器反馈闭合的信号“1”。如图6中的6b所示,在扭缆角度为360度时,机舱102位置点a、b和c处的接近开关31的信号均保持“1”。当机舱102继续顺时针偏航旋转,扭缆角度位于(360,360+γ)开区间内时,则三组接近开关装置30中的对位触发部件32均不与任一接近开关31相对位,机舱102位置点a、b和c处的接近开关31均未被触发,因此,机舱102位置点a、b和c处的接近开关31的信号均保持“0”。当机舱102继续顺时针偏航旋转到扭缆角度恰好等于360+γ度时,则此时,机舱102位置点c处的接近开关31被触发,机舱102位置点c处的接近开关31向控制器反馈闭合的信号“1”,而机舱102位置点a和b处的接近开关31未被触发,机
舱102位置点a和b处的接近开关31的信号仍然保持“0”。以此类推。当顺时针偏航两周至扭缆角度等于720度时,机舱102位置点a、b和c处的接近开关31的信号均保持“1”。如此,可以类似地得到从该位置(-720度)再逆时针偏航返回至扭缆0度时所对应的关系图,在此不再赘述。
56.图7揭示了在图4所示安装三组接近开关装置30的情况下逆时针偏航两周过程中扭缆角度与接近开关31产生的信号时序的对应关系图,其中,图7中的7a示出从扭缆0度逆时针偏航一周时的关系图,图7中的7b示出从一周逆时针偏航两周时的关系图。如图7中的7a所示,例如,在初始扭缆角度为0度时,机舱102位置点a、b和c处的接近开关31均被触发,机舱102位置点a、b和c处的接近开关31均向控制器反馈闭合的信号“1”。当机舱102逆时针偏航旋转,扭缆角度位于(0,-γ)开区间内时,则三组接近开关装置30中的对位触发部件32均不与任一接近开关31相对位,机舱102位置点a、b和c处的接近开关31均未被触发,因此,机舱102位置点a、b和c处的接近开关31的信号均保持“0”。当机舱102继续逆时针偏航旋转到扭缆角度恰好等于-γ度时,则此时,机舱102位置点b处的接近开关31被触发,机舱102位置点b处的接近开关31向控制器反馈闭合的信号“1”,而机舱102位置点a和c处的接近开关31未被触发,机舱102位置点a和c处的接近开关31的信号仍然保持“0”。以此类推。当继续逆时针偏航一周至扭缆角度等于-360度时,机舱102位置点a、b和c处的接近开关31均被触发,机舱102位置点a、b和c处的接近开关31均向控制器反馈闭合的信号“1”。如图7中的7b所示,在扭缆角度为-360度时,机舱102位置点a、b和c处的接近开关31的信号均保持“1”。当机舱102继续逆时针偏航旋转,扭缆角度位于(-360,-(γ+360))开区间内时,则三组接近开关装置30中的对位触发部件32均不与任一接近开关31相对位,机舱102位置点a、b和c处的接近开关31均未被触发,因此,机舱102位置点a、b和c处的接近开关31的信号均保持“0”。当机舱102继续逆时针偏航旋转到扭缆角度恰好等于-(γ+360)度时,则此时,机舱102位置点b处的接近开关31被触发,机舱102位置点b处的接近开关31向控制器反馈闭合的信号“1”,而机舱102位置点a和c处的接近开关31未被触发,机舱102位置点a和c处的接近开关31的信号仍然保持“0”。以此类推。当逆时针偏航两周至扭缆角度等于-720度时,机舱102位置点a、b和c处的接近开关31的信号均保持“1”。如此,可以类似地得到从该位置(720度)再顺时针偏航返回至扭缆0度时所对应的关系图,在此不再赘述。
57.同样地,可以在任意角度往复偏航,扭缆角度在正负之间变动。
58.根据图6和至图7给出的对应关系,以下列举出几种不同机舱102位置偏航动作后(假定均从扭缆角度为0度开始),对应的接近开关31产生的信号时序与扭缆角度的位置关系。
59.表2.1示出了机舱102从扭缆零位开始,持续保持顺时针旋转超过(α+β+γ)角度后,再顺时针回转到扭缆零位,接近开关31产生的信号时序与扭缆角度的位置关系。
60.表2.1
61.序列号abc扭缆角度1111020000~γ3001γ4000γ~(α+β)
5010α+β6000(α+β)~(α+β+γ)7001α+β+γ8000(α+β+γ)~(α+β)9010α+β10000(α+β)~γ11001γ120000~γ131110
62.表2.2示出了机舱102从扭缆零位开始,先保持顺时针旋转超过(α+β)角度后,再逆时针旋转至超过-(α+β)角度,接近开关31产生的信号时序与扭缆角度的位置关系。
63.表2.2
64.序列号abc扭缆角度1111020000~γ3001γ4000γ~(α+β)5010α+β6000γ~(α+β)7001γ80000~γ91110100000~-γ11010-γ12000-γ~-(α+β)13100-(α+β)
65.表2.3示出了机舱102保持顺时针旋转一圈,接近开关31产生的信号时序与扭缆角度的位置关系。
66.表2.3
67.序列号abc扭缆角度1111020000~γ3001γ4000γ~(α+β)5010α+β6000(α+β)~(α+β+γ)7001α+β+γ8000(α+β+γ)~(360-α-β-γ)9100360-α-β-γ
10000(360-α-β-γ)~(360-β-γ)11100360-β-γ12000(360-β-γ)~(360-γ)13010360-γ14000(360-γ)~36015111360
68.表2.4示出了机舱102保持逆时针旋转一圈,接近开关31产生的信号时序与扭缆角度的位置关系。
69.表2.4
70.序列号abc扭缆角度1111020000~-γ3010-γ4000-γ~-(α+β)5100-(α+β)6000-(α+β)~-(α+β+γ7100-(α+β+γ)8000-(α+β+γ)~(α+β+γ-360)9001α+β+γ-36010000(α+β+γ-360)~(α+β-360)11010α+β-36012000(α+β-360)~(α-360)13001α-36014000(α-360)~-36015111-360
71.表2.5示出了机舱102保持顺时针旋转两圈,接近开关31产生的信号时序与扭缆角度的位置关系。
72.表2.5
73.序列号abc扭缆角度1111020000~γ3001γ4000γ~(α+β)5010α+β6000(α+β)~(α+β+γ)7001α+β+γ8000(α+β+γ)~(360-α-β-γ)9100360-α-β-γ10000(360-α-β-γ)~(360-β-γ)
11100360-β-γ12000(360-β-γ)~(360-γ)13010360-γ14000(360-γ)~3601511136016000360~γ+36017001γ+36018000γ+360~(α+β+360)19010α+β20000(α+β+360)~(α+β+γ+360)21001(α+β+γ+360)22000(α+β+γ+360)~(720-α-β-γ)23100720-α-β-γ24000(720-α-β-γ)~(720-β-γ)25100720-β-γ26000(720-β-γ)~(720-γ)27010720-γ28000(720-γ)~72029111720
74.表2.6示出了机舱102保持顺时针旋转两圈,接近开关31产生的信号时序与扭缆角度的位置关系。
75.表2.6
76.序列号abc扭缆角度1111020000~-γ3010-γ4000-γ~-(α+β)5100-(α+β)6000-(α+β)~-(α+β+γ7100-(α+β+γ)8000-(α+β+γ)~(α+β+γ-360)9001α+β+γ-36010000(α+β+γ-360)~(α+β-360)11010α+β-36012000(α+β-360)~(α-360)13001α-36014000(α-360)~-36015111-36016000-360~-(γ+360)
17010-(γ+360)18000-(γ+360)~-(360+α+β)19100-(360+α+β)20000-(360+α+β)~-(360+α+β+γ)21100-(360+α+β+γ)22000-(360+α+β+γ)~α+β+γ-72023001α+β+γ-72024000(α+β+γ-720)~(α+β-720)25010α+β-72026000(α+β-720)~(α-720)27001α-72028000(α-720)~-72029111-720
77.因此,主控制器10可以根据接近开关31产生的信号时序来确定机舱102的偏航方向和扭缆角度的确定的角度值或角度区间。
78.在主控制器10基于接近开关31产生的信号时序确定出机舱102的偏航方向和扭缆角度之后,主控制器10可以基于偏航方向和扭缆角度来判定扭缆角度采集器20获取的实时偏航角度是否有异常。
79.在一些实施例中,当扭缆角度采集器20获取到的实时偏航角度与扭缆角度之间的角度偏差超过预定限值时,则此时,主控制器10可以判定扭缆角度采集器20获取的实时偏航角度有异常。
80.在扭缆角度达到确定的角度值时,至少两组接近开关装置30中的至少部分接近开关31会向主控制器10反馈闭合的信号,并且,主控制器10用于在扭缆角度达到确定的角度值时进行扭缆角度采集器20获取的实时偏航角度是否异常的判定。
81.在本发明实施例的偏航监控系统1中,在扭缆角度达到扭缆极限角度之前,随着机舱102的偏航旋转,基于接近开关31产生的信号时序确定出的扭缆角度将会达到多个确定的角度值,因此,在扭缆角度达到扭缆极限角度之前,至少两组接近开关装置30中的至少部分接近开关31会向主控制器10多次反馈闭合的信号,相应地,主控制器10可以进行多次扭缆角度采集器20获取的实时偏航角度是否异常的判定。
82.例如,在机舱102上安装两组接近开关装置30的实施例中,如图5所示,在机舱102顺时针旋转720度的过程中,当机舱102旋转到七个确定的位置时,确定出的对应扭缆角度为确定的角度值,扭缆角度所达到的七个确定的角度值分别为0、α+β、360-α-β、360、α+β+360、720-α-β和720。同理,如图5中的5b所示,在机舱102逆时针旋转720度的过程中,当机舱102旋转到七个确定的位置时,确定出的对应扭缆角度也为确定的角度值,扭缆角度所达到的七个确定的角度值分别为0、-(α+β)、-(360-α-β)、-360、-(360+α+β)、-(720-α-β)和-720。
83.因此,在偏航监控系统1包括两组接近开关装置30的实施例中,在机舱102从0度偏航旋转720度时,两组接近开关装置30中的接近开关31会向主控制器10反馈七次闭合的信号,在每次反馈闭合的信号时,机舱102位置点a和b处的接近开关31中至少会有一个接近开关31会反馈闭合的信号“1”,相应地,主控制器10可以分别进行七次扭缆角度与实时偏航角
度之间的角度偏差的计算,并且,可以进行七次扭缆角度采集器20获取的实时偏航角度是否异常的判定。
84.又例如,在机舱102上安装三组接近开关装置30的实施例中,如图6所示,在机舱102顺时针旋转720度的过程中,当机舱102旋转到十五个确定的位置时,确定出的对应扭缆角度为确定的角度值,扭缆角度所达到的十五个确定的角度值分别为0、γ、α+β、α+β+γ、360-α-β-γ、360-β-γ、360-γ、360、360+γ、360+α+β、360+α+β+γ、720-α-β-γ、720-β-γ、720-γ和720。如图7所示,在机舱102逆时针旋转720度的过程中,当机舱102旋转到十五个确定的位置时,确定出的对应扭缆角度也为确定的角度值,扭缆角度所达到的十五个确定的角度值分别为0、-γ、-(α+β)、-(α+β+γ)、α+β+γ-360、α+β-360、α-360、-360、-(360+γ)、-(360+α+β)、-(360+α+β+γ)、α+β+γ-720、α+β-720、α-720和-720。
85.因此,在偏航监控系统1包括三组接近开关装置30的实施例中,在机舱102从0度偏航旋转720度时,三组接近开关装置30中的接近开关31会向主控制器10反馈十五次闭合的信号,在每次反馈闭合的信号时,机舱102位置点a、b和c处的接近开关31中至少会有一个接近开关31会反馈闭合的信号“1”,相应地,主控制器10可以分别进行十五次扭缆角度与实时偏航角度之间的角度偏差的计算,并且,可以进行十五次扭缆角度采集器20获取的实时偏航角度是否异常的判定。
86.在一些实施例中,在判定扭缆角度采集器20获取的实时偏航角度有异常时,则主控制器10可以产生相应的故障报警。
87.在一些实施例中,在判定扭缆角度采集器20获取的实时偏航角度有异常时,则主控制器10可以基于接近开关31产生的信号时序来对扭缆角度采集器20进行校准。在一个实施例中,主控制器10可以扭缆角度所达到的任意一个确定的角度值作为扭缆基准角度,来对扭缆角度采集器20进行校准。当然,在其他实施例中,也可以基于接近开关31产生的信号时序所确定的扭缆零度来对扭缆角度采集器20进行校准清零。
88.在一些实施例中,当基于接近开关31产生的信号时序判定出扭缆角度达到解缆角度时,则控制器还可以基于接近开关31产生的信号时序来确定扭缆零位并控制扭缆自动解缆回正。
89.本发明实施例的用于风力发电机组100的偏航监控系统1通过在机舱102上设置至少两组接近开关装置30,并且,根据至少两组接近开关装置30中的接近开关31所产生的信号时序可以获取偏航角度误差、偏航旋转方向及旋转圈数等准确数据,从而可靠地实现了自动校正、提供偏航方向及自动解缆功能。
90.本发明实施例的用于风力发电机组100的偏航监控系统1能够有效地解决现有技术中无法实现准确的自动角度校正及自动解缆回调的问题,本发明实施例的用于风力发电机组100的偏航监控系统1可以实现准确可靠的偏航角度自动校正,并可以提供可靠的偏航方向与自动解缆回调的功能,从而确保风力发电机组100运行的安全可靠。
91.本发明实施例的用于风力发电机组100的偏航监控系统1实现容易、成本较低,大大提高了校正的准确率,可以提供准确的偏航方向和扭缆位置或范围,当达到解缆角度时还可实现扭缆自动回正功能,保证了偏航运行的安全可靠,降低了风力发电机组100的运行风险。
92.本发明实施例还提供了一种用于风力发电机组100的偏航监控方法。图8揭示了本
发明一个实施例的用于风力发电机组100的偏航监控方法的流程图。如图8所示,本发明一个实施例的用于风力发电机组100的偏航监控方法可以包括步骤s1至步骤s3。
93.在步骤s1中,可以通过安装于风力发电机组100的机舱102上的扭缆角度采集器20来获取机舱102的实时偏航角度。
94.在步骤s2中,接收来自安装于机舱102上的至少两组接近开关装置30中的接近开关31产生的信号时序。其中,每组接近开关装置30包括一个接近开关31和与接近开关31相配合的对位触发部件32,对位触发部件32用于在与任一接近开关31对位时触发接近开关31闭合。
95.在步骤s3中,可以基于接近开关31产生的信号时序来监控扭缆角度采集器20获取的实时偏航角度是否有异常。
96.在一些实施例中,步骤s3的基于接近开关31产生的信号时序来监控扭缆角度采集器20获取的实时偏航角度是否有异常可以进一步包括步骤s31和步骤s32。
97.在步骤s31中,可以基于接近开关31产生的信号时序来确定机舱102的偏航方向和扭缆角度。
98.在步骤s32中,可以基于偏航方向和扭缆角度来判定扭缆角度采集器20获取的实时偏航角度是否有异常。在一个实施例中,步骤s32可以进一步包括步骤s321和步骤s322。在步骤s321中,可以将实时偏航角度与扭缆角度进行比较,判断实时偏航角度与扭缆角度之间的角度偏差是否超过预定限值。如果判断的结果为是,则过程继续前进到步骤s322。在步骤s322中,在实时偏航角度与扭缆角度之间的角度偏差超过预定限值时,则判定扭缆角度采集器20获取的实时偏航角度有异常。
99.在一个实施例中,步骤s32中的基于偏航方向和扭缆角度来判定扭缆角度采集器20获取的实时偏航角度是否有异常可以包括:在扭缆角度达到确定的角度值时,至少两组接近开关装置30中的至少部分接近开关31反馈闭合的信号;及在接收到反馈的闭合的信号时,可以基于确定的角度值与达到确定的角度值对应时刻所获取到的实时偏航角度之间的角度偏差来判定扭缆角度采集器20获取的实时偏航角度是否有异常。
100.在扭缆角度达到扭缆极限角度之前,随着机舱102的偏航旋转,扭缆角度会达到多个确定的角度值,在扭缆角度每达到一个确定的角度值时,至少两组接近开关装置30中的至少部分接近开关31会反馈一次闭合的信号,并且,在每接收到一次反馈的闭合的信号时,可以进行一次扭缆角度采集器20获取的实时偏航角度是否异常的判定。
101.在一些实施例中,本发明实施例的偏航监控方法还可以进一步包括步骤s4。在步骤s4中,在判定扭缆角度采集器20获取的实时偏航角度有异常时,则可以基于接近开关31产生的信号时序来对扭缆角度采集器20进行校准。在一个实施例中,可以任意一个确定的角度值作为扭缆基准角度,来对扭缆角度采集器20进行校准。
102.在一些实施例中,本发明实施例的偏航监控方法还可以进一步包括步骤s5。在步骤s5中,在判定扭缆角度采集器20获取的实时偏航角度有异常时,则可以产生相应的故障报警。
103.在另一些实施例中,本发明实施例的偏航监控方法还可以进一步包括步骤s5和步骤s6。在步骤s6中,判断确定出的扭缆角度是否达到解缆角度。在判断的结果为是的情况下,则过程前进到步骤s7。在步骤s7中,在判定扭缆角度达到解缆角度时,则可以基于接近
开关31产生的信号时序来确定扭缆零位并控制扭缆自动解缆回正。
104.本发明实施例的用于风力发电机组100的偏航监控方法具有与上面所述的用于风力发电机组100的偏航监控系统1相类似的有益技术效果,故,在此不再赘述。
105.以上对本发明实施例所提供的用于风力发电机组的偏航监控系统及其方法进行了详细的介绍。本文中应用了具体个例对本发明实施例的用于风力发电机组的偏航监控系统及其方法进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想,并不用以限制本发明。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明的精神和原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也均应落入本发明所附权利要求书的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1