小型涡扇发动机参控压力参数判故方法及冗余控制方法与流程
1.本发明涉及小型涡扇发动机技术领域,尤其涉及小型涡扇发动机参控压力参数判故方法及冗余控制方法。
背景技术:
2.涡扇发动机的压气机后总压是发动机的重要控制参数,为在压气机后安置的总压测量装置获取发动机实际工作参数,经a/d(模拟量/数字量)转换为作为控制参数使用。在比较常见的发动机的油气比控制规律中作为供油调节的计算依据。一旦信号出现故障,则意味着无法准确地进行供油调节,后果严重。因此在发动机压气机后总压出现问题的情况下,需要及时、准确的进行判断,并通过参数解析将之替换。
3.参数解析方法是通过发动机的其他工作参数,如发动机转速,发动机进口空气状态等解析发动机气流通道中的压力、温度等,包括压气机后总压。
4.航空发动机一般会对发动机重要控制信号进行冗余,较多使用的是硬件冗余。但是小型涡扇发动机由于尺寸、重量、成本等因素的限制,很多时候进行硬件冗余是不适用的。
技术实现要素:
5.有鉴于此,本发明提供了一种小型涡扇发动机参控压力参数判故方法及冗余控制方法,可以实时、准确的进行故障信息判断,并且实现冗余控制。
6.一种小型涡扇发动机参控压力参数判故方法,包括:
7.在发动机准备起动至起动成功之间,按照如下判据判定发动机压气机后气流总压u3td信号是否正常:
8.当发动机压气机后气流总压电压量u3td连续3次超出设定上限或设定下限,则认为发动机压气机后气流总压u3td信号异常;
9.在发动机起动成功后至发动机停车,按照如下判据判定发动机压气机后气流总压u3td信号是否正常:
10.当连续3个周期加速控制获得控制权,则认为传感器故障,即发动机压气机后气流总压u3td信号异常;
11.当连续3个周期减速控制获得控制权,则认为传感器故障,即发动机压气机后气流总压u3td信号异常。
12.较佳的,发动机压气机后气流总压电压量u3td的设定上限u3td_max和设定下限u3td_min计算公式为:
13.u3td_max=(0.85-0.03
×
h/1000)v;
14.u3td_min=(0.45-0.03
×
h/1000)v;
15.其中h为起动高度。
16.一种小型涡扇发动机参控压力参数冗余控制方法,包括:
17.在发动机准备起动至起动成功之间,按照如下判据判定发动机压气机后气流总压u3td信号是否正常:
18.当发动机压气机后气流总压电压量u3td连续3次超出设定上限或设定下限,则认为发动机压气机后气流总压u3td信号异常;
19.在发动机起动成功后至发动机停车,按照如下判据判定发动机压气机后气流总压u3td信号是否正常:
20.当连续3个周期加速控制获得控制权,则认为传感器故障,即发动机压气机后气流总压u3td信号异常;
21.当连续3个周期减速控制获得控制权,则认为传感器故障,即发动机压气机后气流总压u3td信号异常;
22.使用发动机模型性能仿真数学模型,利用输入的气压高度h、马赫数ma、发动机油门控制电压uy、发动机高压转子转速nh以及发动机压风扇后总温电压量u6td,计算发动机性能数据,存入性能数据表;
23.判定发动机压气机后气流总压u3td信号异常后,如果当前为“发动机起动成功”前,不进行冗余控制,终止任务流程;
24.如果当前为“发动机起动成功”后,停止使用当前采集的发动机压气机后气流总压u3td,按照当前收到气压高度h、马赫数ma、发动机油门控制电压uy、发动机高压转子转速nh,从性能数据表插值得到发动机压气机后气流总压u3td的值,参与控制计算。
25.较佳的,发动机压气机后气流总压电压量u3td的设定上限u3td_max和设定下限u3td_min计算公式为:
26.u3td_max=(0.85-0.03
×
h/1000)v;
27.u3td_min=(0.45-0.03
×
h/1000)v;
28.其中h为起动高度。
29.较佳的,在计算发动机性能数据后,使用发动机试验数据对其进行修正,再存入性能数据表。
30.较佳的,计算发动机性能数据时,马赫数ma取值范围为0~0.9。
31.较佳的,计算发动机性能数据时,气压高度h取值范围为0~13km。
32.较佳的,计算发动机性能数据时,发动机油门控制电压uy取值范围为1v~16v。
33.本发明具有如下有益效果:
34.本发明提供了一种小型涡扇发动机参控压力参数判故方法及冗余控制方法,对无人机使用的小型涡轮涡扇发动机的重要控制参数-压气机后总压制定合理的判故策略,以实时、准确的进行故障信息判断;
35.通过发动机数学建模获取的发动机性能参数,在发动机压气机总压不可信的情况下,利用发动机进口参数、转速、风扇后总温等参数计算得到压气机总压代替原传感器采集参数进行冗余,保证无人机的正常飞行,提高工作可靠性。
附图说明
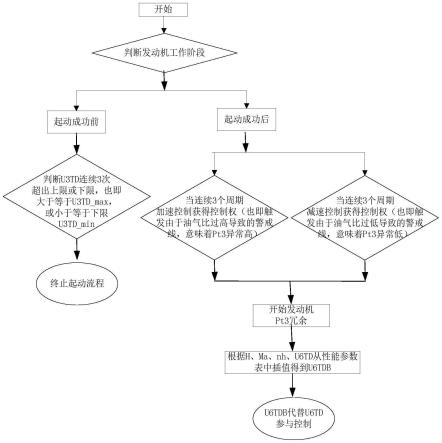
36.图1为本发明的pt3判故及冗余控制流程图;
37.图2为本发明的方法验证效果图。
具体实施方式
38.下面结合附图并举实施例,对本发明进行详细描述。
39.本发明中使用的参数符号定义如下:
40.p
t3
表示发动机压气机后气流总压,单位为千帕(kpa);u3td表示发动机压气机后气流总压电压量,单位为伏(v);tt13表示发动机风扇后总温,单位为开尔文(k);u6td表示发动机压风扇后总温电压量,单位为伏(v);uy表示发动机油门控制电压,对应推力,单位为伏(v);nh表示发动机高压转子转速,单位为转每分钟(r/min);h表示气压高度,单位为千米(km);ma表示马赫数,飞行速度与当地音速的比值,为无量纲参数。
41.本发明方法主要包括如下内容:
42.1)发明方法作用时机
43.在发动机上电后至停车前,也即开始以油气比控制规律参与控制期间。
44.2)发动机压气机后总压信号故障判断方法
45.在对油气比控制规律的控制特点分析及故障数据分析的基础上,按照不同的工作阶段制定了压气机后总压pt3传感器报故准则。
46.发动机工作流程为发动机准备起动
→
起动
→
起动成功
→
发动机停车。
47.准备起动至起动成功之间,pt3传感器判故准则依据如下:
48.异常判据1:判断u3td(pt3)连续3次超出上限或下限,也即大于等于u3td_max,或小于等于下限u3td_min,则认为u3td(pt3)信号异常。其中u3td_max与u3td_min为起动时刻气压高度h的函数,按以下公式进行计算:
49.u3td_max=(0.85-0.03*h/1000)v;
50.u3td_min=(0.45-0.03*h/1000)v。
51.其中h为起动高度(气压高度),0≤h≤5000m。
52.起动成功后至发动机停车,pt3传感器判故准则依据如下:
53.异常判据2:当连续3个周期加速控制获得控制权(也即触发由于油气比过高导致的警戒线,意味着pt3异常高),则认为传感器故障。
54.异常判据3:当连续3个周期减速控制获得控制权(也即触发由于油气比过低导致的警戒线,意味着pt3异常低),则判定u3td信号出现异常。
55.3)发动机转速信号故障后冗余方法
56.采用的冗余方案为:使用发动机模型性能仿真程序(该程序中包含发动机主要部件的数学模型),通过计算得到发动机性能数据表,并使用发动机试验数据对其进行修正。性能数据表有包括进口条件参数h、ma、uy、nh、u6td。基于精度影响、常用范围、内存数据表格大小等因素的考虑确定马赫数取值范围为0~0.9,高度取值为0~13km,uy范围1v~16v,在以上范围内计算发动机性能数据,并以数据表的方式装定到发动机数字控制器内存里。
57.判定pt3信号失效后,按发动机工作阶段采用不同的冗余措施:
58.在“发动机起动成功”前,如果出现pt3传感器报故,由于此时的转速、气压。温度等均变化剧烈,容易因响应不及时带来的油气比不合适而导致发动机起动过程超温、超转等,易损伤发动机,因此此过程不进行冗余,而采取应急处理,终止任务流程。
59.在“发动机起动成功”后,停止使用ad采集的当前的u3td,按照当前收到的h、ma,以及通过nh、u6td解算出来的实际油门控制电压uy,从发动机性能数据表插值得到u3td,参与
控制计算。
60.试验验证效果如图2所示,如图可见当故障码跳为4时,为模拟u3td故障,由图可以见替代后一致性较好,计算偏差可以保证发动机的正常工作的,对无人机而言,推力控制误差在允许范围内。由于可见,验证效果满足要求。
61.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1