一种基于半马尔可夫模型的风力发电机组控制方法
1.本发明涉及风力发电机组的网络控制领域,涉及一种基于新型的事件触发协议的风力发电机组控制方法,尤其是如何利用历史释放的数据包和自适应触发参数,设计一种新型的事件触发协议,在数据传输率和系统性能之间建立平衡,实现有效的控制,具体是一种基于半马尔可夫模型的风力发电机组控制方法。
背景技术:
2.由于全球经济对化石燃料的依赖和全球气候变暖,人们越来越关注代替化石燃料发电的方法。在能源市场多元化的趋势下,大多数国家开始关注可再生能源,如太阳能、风能、生物质能等,在这些可再生能源中,风能因其成本效益、可持续性和温室气体排放量低而受到广泛关注。随着风电资源的获取,一些挑战主要在如何提高风能转换上。众所周知,风力发电机组具有很强的非线性和不确定性,其控制设计难度很大。为了解决这些问题,许多研究人员提出了一些有效的控制策略,如最优控制、模糊控制、滑模控制、预测控制等。然而,传统控制策略主要基于一个或几个操作点,当工作点偏离时,对风力发电机组的控制效果会降低。此外,风速的随机特性变化会导致工作点的频繁切换,给控制设计带来困难。一些研究关于风速的随机特性,例如应用马尔可夫过程分析风速的时间序列数据,促使我们对风力发电机组切换属性的控制问题进行研究。
3.此外,比例积分观测器由于独特的设计而备受关注,被成功应用于许多实际领域,如网络系统、电力系统和经济领域等。基于luenberger观测器,比例积分观测器增加了积分项的输出误差,从而获得更好的动态性能和较小的估计误差。
4.另一方面,事件触发协议能够解决在网络传输中带宽有限的问题,即传输只有满足规定条件时才激活信号。在与经典的时间触发协议相比,事件触发协议能够降低不必要的信息交换,同时确保在特定情况下的控制性能。然而,大多数的事件触发协议是恒定触发的,无论系统状态如何变化,系统参数都保持不变。为了克服这个问题,自适应事件触发协议被提出,根据给定的参数动态进行调整,以节省更多网络资源。虽然自适应事件触发协议可以更好地减少数据传输,系统性能可能会退化,但是,考虑到丢弃的数据包可能包含一些有用的信息,这会导致系统性能更差。
技术实现要素:
5.本发明的目的是针对现有技术的不足,而提供一种基于半马尔可夫模型的风力发电机组控制方法。这种方法能提高风力发电机组的控制性能,同时节省网络资源。
6.实现本发明目的的技术方案是:
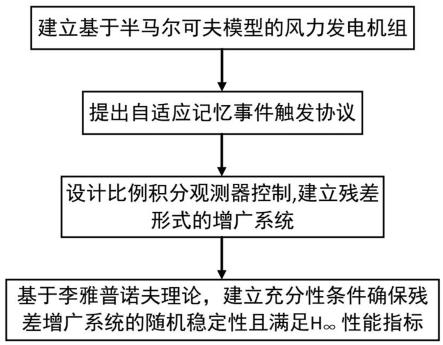
7.一种基于半马尔可夫模型的风力发电机组控制方法,包括如下步骤:
8.1)建立基于半马尔可夫模型的风力发电机组:半马尔可夫模型的风力发电机组中考虑到风速的变化,风速可以由平均风速和扰动风速组成,将平均风速数据采样到不同的区间,平均风速的随机特性可以表示为半马尔可夫过程,而每个区间的扰动风速被视为扰
动输入,将风力发电机组的运行点相应地划分为不同的子区域,每个子区域中的模型参数和控制模式可以固定,因此风力发电机组可以描述为如公式(1)所示的半马尔可夫跳变系统:
[0009][0010]
具体过程为:
[0011]
1-1):构建风力发电机组模型:假设风力发电机组控制系统由风力机、传动机制单元和发电机单元组成,根据风速确定的运行点,可将风力发电机组建模为如公式(5)所示:
[0012][0013]
其中,θs为传动轴的等效扭转角,ωr和ωg分别为风力机转子转速和发电机转子转速,jr和jg分别为风力机转子和发电机转子的等效转动惯量,tr和tg分别为气动转矩和发电机转矩,ng为齿轮箱的传动比,bs为传动轴的等效扭转刚度,ks为传动轴的等效阻尼因子,β为实际桨距角,βd为参考桨距角,τ为时间常数,
[0014]
风力机是整个系统的驱动器,气动转矩tr可以表示为如公式(6)所示:
[0015][0016]
其中,r为转子半径,ρ为空气密度,λ为叶尖速比,风电利用系数c
p
(λ,β)是针对特定风力机在不同风速条件下近似计算和建模的,可以近似表示为如公式(7)所示:
[0017][0018]
其中,ci是表征风力机的参数,i=1,2
…
8,
[0019]
发电机转矩tg可以看成是零转矩转速t
g,ref
和发电机转子转速ωg的非线性函数,通常,发电机在其转矩特性的线性域中执行,由以下线性形式表示:
[0020]
tg=bgω
g-bgt
g,ref
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8),
[0021]
考虑到风速的随机变化,实际风速可以由平均风速和扰动风速组成,如公式(9)所示:
[0022]
v(t)=vs(t)+vw(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9),
[0023]
在区间[t0,t1]上,平均风速被定义为如公式(10)所示:
[0024][0025]
由于风速是随机变化的,根据风速值的变化,已将风速划分为o个区域,将平均风速数据采样到不同的区间,平均风速v
s,r(t)
(t)的随机特性可以表示为半马尔可夫过程,具体来说,随机变量r(t)表示为一个半马尔可夫过程,它在空间上取值;
[0026]
1-2)半马尔可夫过程:对马尔可夫过程进行如下定义:t
l
为第l个转移时刻,表示马尔可夫过程,d
l
=t
l-t
l-1
为半马尔可夫过程的驻留时间,gi(
·
)和分别为概率分布函数和概率密度函数,描述的是一个齐次马尔可夫更新过程,马尔可夫链的转移概率被定义为如公式(11)所示:
[0027][0028]
令n(t)=sup{l:t
l
≤t},当时,半马尔可夫过程{r(t),t≥0}被马尔可夫更新过程所支配,基于上面的分析,当第i个子系统被激活时,概率分布函数被定义为如公式(12)所示:
[0029][0030]
在此情况下,可以得到如公式(13)所示:
[0031][0032]
通过计算,可以得到半马尔可夫{r(t),t≥0}的转移概率如公式(14)所示:
[0033][0034]
其中
[0035]
1-3)建立基于半马尔可夫模型的风力发电机组:对气动转矩tr采用泰勒展开式,可以得到如公式(15)所示:
[0036]
tr=t
r1
(vs)+t
r2
(vs)vw(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15),
[0037]
其中,
[0038][0039][0040]
令xc(t)=[θ
s ω
r ω
g β]
t
,yc(t)=ωg,u(t)=[β
d t
g,ref
]
t
,则公式(1)所示的风
力发电机组写成如公式(16)所示:
[0041][0042]
其中,
[0043][0044]
对于第i个运行的子区域,定义运行点为令应用泰勒展开式,则公式(17)被建模为基于半马尔可夫模型的风力发电机组:
[0045][0046]
其中,
[0047][0048][0049]
2)提出自适应记忆事件触发调度协议:具体为:新型的自适应记忆事件触发协议数学模型可以表述为如公式(18)所示:
[0050]
[0051]
其中,
[0052][0053]es
(t)=y(tkh+lh)-y(t
k+1-s
h),
[0054]
自适应触发参数σi(tkh)满足如下的更新规则:
[0055][0056]
其中,表示σi(tkh)的下界,λ定义为:
[0057][0058][0059]
ρs(tkh)=||y(tkh)||-||y(t
k-s
h)||,
[0060]
其中,h表示采样周期,tkh表示事件触发时刻,s表示历史传输数据包的数量,φi是待设计正定矩阵,假设α>0,α越大将会导致σi(tkh)发生很大变化,对μs∈[0,1]表示权重系数,且满足考虑到在通信网络中会存在网络诱导延迟,将零阶保持器的每一个时间段t∈[tkh,t
k+1
h]划分成多个小区间的并集,即其中,i
l
=[tkh+lh+τ
k+l
,tkh+lh+h+τ
k+l+1
],定义延迟函数τ(t)=t-tkh-lh,进一步可以得到其中
[0061]
3)设计记忆型的比例积分观测器控制,建立残差形式的增广系统:过程包括:
[0062]
3-1)设计记忆型的比例积分观测器:为了与所设计的事件触发协议相匹配,记忆型的比例积分观测器具有如公式(2)所示形式:
[0063][0064]
其中,是对状态x(t)的估计,是对输出y(t)的估计,表示加权误差的积分,l
ps,i
、l
is,i
分别表示待设计的比例增益和积分增益;
[0065]
3-2)设计基于比例积分观测器的控制律:设计基于比例积分观测器的控制律,具体形式为公式(3)所示:
[0066]
[0067]
其中,ki表示待设计的控制器增益;
[0068]
3-3)建立残差形式的增广系统:
[0069]
令则残差形式的增广系统被建模成公式(4)所示:
[0070][0071]
其中,
[0072][0073]
4)基于李雅普诺夫理论,建立充分性条件确保残差增广系统的随机稳定性且满足h
∞
性能指标:采用mtalab的lmi工具箱求解比例积分观测器增益和控制器增益,具体过程如下:
[0074]
基于李雅普诺夫理论,确保残差增广系统的随机稳定性且满足h
∞
性能指标的充分性条件为:
[0075]
给定标量τm>0,ι>0,和α,如果存在正定矩阵pi,q,r,φi和任意的矩阵u、z=diag{z1,z2,z3},使得下面的条件成立,则残差增广系统是随机稳定的并且满足h
∞
性能指标:
[0076][0077]
其中,
[0078][0079][0080][0081][0082]
h=[i 0 0],
[0083]
依据线性矩阵不等式,求解比例积分观测器增益和控制器增益,过程为:
[0084]
给定标量τm>0,ι>0,和α,如果存在正定矩阵pi,q,r,φi和任意的矩阵u、z=diag{z1,z2,z3},使得下面的条件成立,则残差增广系统是随机稳定的并且满足h
∞
性能指标:
[0085][0086]
其中,
[0087][0088][0089][0090]
此外,控制器增益为比例积分观测器增益为其中
[0091]
与现有技术相比,本技术方案的优点在于:
[0092]
1、将切换风速驱动的风力发电机组建模为一个半马尔可夫切换系统,考虑到风速的随机变化,通过将平均风速数据采样到不同的区间,平均风速的随机特性可以表示为半马尔可夫过程,然后,将风力发电机组的运行点相应地划分为不同的子区域,每个子区域中的模型参数和控制模式可以固定,与传统的方法相比,本技术方案对切换风速驱动的风力发电机组进行了优化,更加贴近实际环境;
[0093]
2、为了调节传输频率,本技术方案提供了一种新型的自适应记忆事件触发协议,考虑了历史释放的数据包对最新触发信号的影响,还引入了自适应触发参数,在节约网络资源的同时,确保更好的控制性能。
[0094]
本技术方案将切换风速驱动的风力发电机组建模作为一个半马尔可夫切换系统,将风速范围划分为不同的区间,风速随机性特征被认为是一个半马尔可夫过程,并且风力发电机系统运行点服从不同子区域之间的半马尔可夫切换,提出了自适应记忆事件触发协议能提高风力发电机组的控制性能,同时节省网络资源,提供记忆型的比例积分观测器,结合李雅普诺夫函数理论,确保残差增广系统随机稳定且满足h
∞
性能指标的充分条件。
[0095]
这种方法能提高风力发电机组的控制性能,同时节省网络资源。
附图说明
[0096]
图1为实施例方法的流程示意图;
[0097]
图2为实施例中风力发电机组的结构示意图;
[0098]
图3为实施例中风力发电机组各控制模块的结构框图;
[0099]
图4为实施例中风力发电机组的状态轨迹图和观测轨迹图;
[0100]
图5为实施例中风力发电机组的误差轨迹图;
[0101]
图6为实施例中系统模态变化图;
[0102]
图7为实施例中实际风速的轨迹图;
[0103]
图8为实施例中在自适应记忆事件触发协议下,历史释放信号数量为s=3的自适应参数轨迹图;
[0104]
图9为实施例中在自适应记忆事件触发协议下,历史释放信号数量为s=1、3、5的状态范数||x(t)||1的轨迹图;
[0105]
图10为实施例中在自适应记忆事件触发协议下,历史释放信号数量为s=1、3、5的释放时刻与释放间隔仿真结果示意图。
具体实施方式
[0106]
下面结合附图和实施例对本发明的内容做进一步的阐述,但不是对本发明的限定。
[0107]
实施例:
[0108]
参照图1,一种基于半马尔可夫模型的风力发电机组控制方法,包括如下步骤:
[0109]
1)如图2所示,建立基于半马尔可夫模型的风力发电机组:半马尔可夫模型的风力发电机组中考虑到风速的变化,风速可以由平均风速和扰动风速组成,将平均风速数据采样到不同的区间,平均风速的随机特性可以表示为半马尔可夫过程,而每个区间的扰动风速被视为扰动输入,将风力发电机组的运行点相应地划分为不同的子区域,每个子区域中的模型参数和控制模式可以固定,因此风力发电机组可以描述为如公式(1)所示的半马尔可夫跳变系统:
[0110][0111]
具体过程为:
[0112]
1-1):构建风力发电机组模型:假设风力发电机组控制系统由风力机、传动机制单元和发电机单元组成,根据风速确定的运行点,可将风力发电机组建模为如公式(5)所示:
[0113][0114]
其中,θs为传动轴的等效扭转角,ωr和ωg分别为风力机转子转速和发电机转子转速,jr和jg分别为风力机转子和发电机转子的等效转动惯量,tr和tg分别为气动转矩和发电机转矩,ng为齿轮箱的传动比,bs为传动轴的等效扭转刚度,ks为传动轴的等效阻尼因子,β为实际桨距角,βd为参考桨距角,τ为时间常数,
[0115]
风力机是整个系统的驱动器,气动转矩tr可以表示为如公式(6)所示:
[0116][0117]
其中,r为转子半径,ρ为空气密度,λ为叶尖速比,风电利用系数c
p
(λ,β)是针对特定风力机在不同风速条件下近似计算和建模的,可以近似表示为如公式(7)所示:
[0118][0119]
其中,ci是表征风力机的参数,i=1,2
…
8,
[0120]
发电机转矩tg可以看成是零转矩转速t
g,ref
和发电机转子转速ωg的非线性函数,通常,发电机在其转矩特性的线性域中执行,由以下线性形式表示:
[0121]
tg=bgω
g-bgt
g,ref
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8),
[0122]
考虑到风速的随机变化,实际风速可以由平均风速和扰动风速组成,如公式(9)所示:
[0123]
v(t)=vs(t)+vw(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9),
[0124]
在区间[t0,t1]上,平均风速被定义为如公式(10)所示:
[0125][0126]
由于风速是随机变化的,根据风速值的变化,已将风速划分为o个区域,将平均风速数据采样到不同的区间,平均风速v
s,r(t)
(t)的随机特性可以表示为半马尔可夫过程,具体来说,随机变量r(t)表示为一个半马尔可夫过程,它在空间上取值;
[0127]
1-2)半马尔可夫过程:对马尔可夫过程进行如下定义:t
l
为第l个转移时刻,表示马尔可夫过程,d
l
=t
l-t
l-1
为半马尔可夫过程的驻留时间,gi(
·
)和分别为概率分布
函数和概率密度函数,描述的是一个齐次马尔可夫更新过程,马尔可夫链的转移概率被定义为如公式(11)所示:
[0128][0129]
令n(t)=sup{l:t
l
≤t},当时,半马尔可夫过程{r(t),t≥0}被马尔可夫更新过程所支配,基于上面的分析,当第i个子系统被激活时,概率分布函数被定义为如公式(12)所示:
[0130][0131]
在此情况下,可以得到如公式(13)所示:
[0132][0133]
通过计算,可以得到半马尔可夫{r(t),t≥0}的转移概率如公式(14)所示:
[0134][0135]
其中
[0136]
1-3)建立基于半马尔可夫模型的风力发电机组:对气动转矩tr采用泰勒展开式,可以得到如公式(15)所示:
[0137]
tr=t
r1
(vs)+t
r2
(vs)vw(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15),
[0138]
其中,
[0139][0140][0141]
令xc(t)=[θ
s ω
r ω
g β]
t
,yc(t)=ωg,u(t)=[β
d t
g,ref
]
t
,则公式(1)所示的风力发电机组写成如公式(16)所示:
[0142][0143]
其中,
[0144][0145]
对于第i个运行的子区域,定义运行点为令应用泰勒展开式,则公式(17)被建模为基于半马尔可夫模型的风力发电机组:
[0146][0147]
其中,
[0148][0149][0150]
本例中,x(t)为系统状态,y(t)为测量输出,u(t)为控制输入,u(t)=[β
d t
g,ref
]
t
,vw(t)为扰动量,θs为轴的等效扭转角,ωr和ωg分别为风力机转子转速和发电机转子转速,t
g,ref
为零转矩转速,β为实际桨距角,βd为参考桨距角,随机变量r(t)=i表示为一个半马尔可夫过程,它在空间上取值,ai,bi,c
i di为合适维数的矩阵,
[0151][0152][0153]
jr和jg分别为风力机转子和发电机转子的等效转动惯量,tr和tg分别为气动转矩和发电机转矩,ng为齿轮箱的传动比,bs为轴的等效扭转刚度,ks为轴的等效阻尼因子,τ为时间常数;
[0154]
2)提出自适应记忆事件触发调度协议:具体为:
[0155]
新型的自适应记忆事件触发协议数学模型可以表述为如公式(18)所示:
[0156][0157]
其中,
[0158][0159]es
(t)=y(tkh+lh)-y(t
k+1-s
h),
[0160]
自适应触发参数σi(tkh)满足如下的更新规则:
[0161][0162]
其中,表示σi(tkh)的下界,λ定义为:
[0163][0164][0165]
ρs(tkh)=||y(tkh)||-||y(t
k-s
h)||,
[0166]
其中,h表示采样周期,tkh表示事件触发时刻,s表示历史传输数据包的数量,φi是待设计正定矩阵,假设α>0,α越大将会导致σi(tkh)发生很大变化,对μs∈
[0,1]表示权重系数,且满足考虑到在通信网络中会存在网络诱导延迟,将零阶保持器的每一个时间段t∈[tkh,t
k+1
h]划分成多个小区间的并集,即其中,i
l
=[tkh+lh+τ
k+l
,tkh+lh+h+τ
k+l+1
],定义延迟函数τ(t)=t-tkh-lh,进一步可以得到其中
[0167]
3)如图3所示,设计记忆型的比例积分观测器控制,建立残差形式的增广系统:过程包括:
[0168]
3-1)设计记忆型的比例积分观测器:为了与所设计的事件触发协议相匹配,记忆型的比例积分观测器具有如公式(2)所示形式:
[0169][0170]
其中,是对状态x(t)的估计,是对输出y(t)的估计,表示加权误差的积分,l
ps,i
、l
is,i
分别表示待设计的比例增益和积分增益;
[0171]
3-2)设计基于比例积分观测器的控制律:设计基于比例积分观测器的控制律,具体形式为公式(3)所示:
[0172][0173]
其中,ki表示待设计的控制器增益;
[0174]
3-3)建立残差形式的增广系统:
[0175]
令则残差形式的增广系统被建模成公式(4)所示:
[0176][0177]
其中,
[0178][0179]
4)基于李雅普诺夫理论,建立充分性条件确保残差增广系统的随机稳定性且满足h
∞
性能指标:采用mtalab的lmi工具箱求解比例积分观测器增益和控制器增益,具体过程如下:
[0180]
基于李雅普诺夫理论,确保残差增广系统的随机稳定性且满足h
∞
性能指标的充分性条件为:
[0181]
给定标量τm>0,ι>0,和α,如果存在正定矩阵pi,q,r,φi和任意的矩阵u、z=
diag{z1,z2,z3},使得下面的条件成立,则残差增广系统是随机稳定的并且满足h
∞
性能指标:
[0182][0183]
其中,
[0184][0185][0186][0187][0188]
h=[i 0 0],
[0189]
依据线性矩阵不等式,求解比例积分观测器增益和控制器增益,过程为:
[0190]
给定标量τm>0,ι>0,和α,如果存在正定矩阵pi,q,r,φi和任意的矩阵u、z=diag{z1,z2,z3},使得下面的条件成立,则残差增广系统是随机稳定的并且满足h
∞
性能指标:
[0191][0192]
其中,
[0193][0194]
[0195][0196]
此外,控制器增益为比例积分观测器增益为其中
[0197]
本例采用2mw风力机进行仿真,验证本例方法的有效性,其中运行点的切换服从半马尔可夫过程,系统参数如表1所示,平均风速的区域划分如表2所示:
[0198][0199]
表1,
[0200][0201]
表2,
[0202]
功率系数c
p
(λ,β)的参数如下:
[0203]
c1=0.5176,c2=116,c3=0.4,c4=21,c5=0.0068,c6=0.08,c7=0.035,
[0204]
对于半马尔可夫过程,其驻留时间被考虑服从weibull分布,其转移率矩阵的期望取值为:
[0205][0206]
系统的初始状态为:x0=[0 1
ꢀ‑
1 2]
t
,扰动风速的范围为:-1.5≤vw≤1.5,
[0207]
设定标量参数如下:
[0208]
α=0.5,ι=0.05,τm=0.2,h=0.05
[0209]
取历史释放数据包的数量s=3,在γ=0.5,μ1=0.5,μ2=0.3,μ3=0.2下,利用matlab的lmi工具箱求出比例积分观测器增益、控制器增益和事件触发矩阵为:
[0210][0211][0212][0213][0214][0215][0216][0217][0218][0219]
[φ1|φ2|φ3]=[3.2809|3.2871|3.4322]
[0220]
风力发电机组的状态轨迹和观测轨迹如图4所示,误差轨迹如图5所示,系统模态变化如图6所示,实际风速的变化如图7所示,自适应参数轨迹如图8所示,可以看出,系统能很快的趋于稳定,说明本例方法是有效的;
[0221]
采用选取不同的历史释放数据包的数量s=1,3,5,来分析自适应记忆事件触发协议中历史释放数据包的数量对系统的影响,在自适应记忆事件触发协议下,历史释放信号数量为s=1,3,5的状态范数||x(t)||1轨迹和释放时刻与释放间隔仿真结果示意图分别由
图9和图10所示,表3展示了对于不同类型的自适应记忆事件触发协议的平均触发数据包数量:
[0222][0223]
表3,
[0224]
从表3、图9和图10可以发现,随着s的增大,平均触发数据包数量也会增加,这意味着更多的历史释放数据被考虑,就会造成更多的数据包被释放,虽然在s=3,5的自适应记忆事件触发协议下比在s=1的自适应记忆事件触发协议下释放更多的数据包,但它可以使系统能够更快速的稳定,具有很好的控制性能,此外,在s=3的自适应记忆事件触发协议下比在s=5的自适应记忆事件触发协议下释放的数据包少,但它们的状态曲线几乎同时稳定,这说明,考虑的历史数据包数量不是越多越好,应该选择合适范围,在数据传输率和控制性能之间建立平衡,此外,当s=1时,自适应记忆事件触发协议会退化成传统的自适应事件触发协议,这说明在相同的触发参数条件下,与传统方法相比,本例方法更通用、本例方法具有稳定时间短的优点,因此本例方法可以获得更好的控制效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1