一种风力发电机组叶片净空保护系统及方法与流程
1.本发明属于叶片净空保护技术领域,特别涉及一种风力发电机组叶片净空保护系统及方法。
背景技术:
2.风电机组叶片净空是指机组运行过程中叶尖到塔筒表面的最小距离,对风电机组的安全非常重要。目前,风电机组的功率等级越来越大,叶片的长度也越来越长,随着叶片长度的增加,叶片刚度相应会减小,在较高风速下叶尖的变形量较大,在极端湍流情况下可能会出现叶尖扫塔的严重事故,影响风电机组安全运行。因此,有必要实时监测叶片净空是否在安全范围内。
3.传统的叶片净空监测方法包括激光雷达测距、毫米波雷达测距,多头激光测距、图像识别测距等,叶片净空监测结果易受灰尘、湿气、浓雾等的影响,导致监测可靠性不高、经济性差。另外也有使用净空测距仪、电涡流传感器等测量叶片净空的方法,以上方法容易受电磁干扰的影响,同时塔筒外传感器的布线、走线非常困难,基本没法实现。
技术实现要素:
4.为了解决现有技术存在的上述问题,本发明的目的在于提供一种利用形变开关传感器测量叶片净空是否在安全范围内的风力发电机组叶片净空保护系统及方法。
5.本发明所采用的技术方案为:
6.一种风力发电机组叶片净空保护系统,包括净空保护控制箱和叶尖形变报警传感器,叶尖形变报警传感器对应于风机的桨叶叶尖设置,叶尖形变报警传感器与净空保护控制箱电连接,风机上还安装有风机控制系统和无线接收器,净空保护控制箱与无线接收器通信连接,无线接收器与风机控制系统电连接。
7.本发明的叶尖形变报警传感器前段受外力而产生形变时,其后段内开关传感器状态会发生变化。该变形开关信号发送至净空保护控制箱,净空保护控制箱再通过无线接收器将变形开关信号发送至风机控制系统。风机控制系统接收到该信号变化后会立即发出停机指令,风机收桨停机,以免发生更大的形变出现叶尖扫塔的危险,保护风机安全。
8.本发明实现通过形变开关传感器测量叶片净空是否在安全范围内,测量信号为纯机械性质,不受天气、环境及电磁干扰的影响,能够可靠保证机组的叶片净空安全。
9.作为本发明的优选方案,所述净空保护控制箱包括控制器和无线发射器,叶尖形变报警传感器与控制器电连接,控制器与无线发射器电连接,无线发射器与无线接收器通信连接。叶尖形变报警传感器将形变信号发送至控制器,控制器通过无线发射器将形变信号发送至无线接收器,无线接收器与风机控制系统进行信号交互。
10.作为本发明的优选方案,所述净空保护控制箱还包括太阳能电池板,太阳能电池板电连接有蓄电池,蓄电池电连接有配电开关,净空保护控制箱内安装有控制单元,控制单元与配电开关电连接。太阳能电池板为蓄电池充电,蓄电池通过配电开关为净空保护控制
箱提供电源。
11.作为本发明的优选方案,所述叶尖形变报警传感器与风机叶尖的最低位置等高。根据风电机组叶片净空的定义,机组运行过程中叶尖到塔筒表面的最小距离为风电机组叶片净空。叶尖形变报警传感器位于净空区域内,则叶尖形变报警传感器能及时探测净空减小到设置的危险值,并由风机控制系统控制风机停机,保证风机运行安全。
12.作为本发明的优选方案,所述净空保护控制箱还包括驱动机构,驱动机构的输出端连接有滚轮,风机的塔筒上设置有环形轨道,滚轮设置于环形轨道内,叶尖形变报警传感器安装于净空保护控制箱上。
13.风机控制系统根据风向传感器探测的风向控制风机机头方向,保证风机充分利用风力。此时,驱动机构可驱动净空保护控制箱和叶尖形变报警传感器转动,使叶尖形变报警传感器和叶轮表面垂直,叶尖形变报警传感器始终位于风电机组叶片净空区域内。
14.作为本发明的优选方案,所述风机控制系统电连接有风向传感器,风机控制系统电连接有用于控制叶轮方向的风机偏航系统;所述控制器与驱动机构电连接。风机控制系统在给出风机偏航指令时,会同步给净空保护控制箱启动指令,从而驱动机构驱动净空保护控制箱与风机机头同速、同向运行,方便自动控制叶尖形变报警传感器与叶轮表面保持垂直。
15.作为本发明的优选方案,风机的塔筒上还安装有接近开关,接近开关位于净空保护控制箱的移动路径上,接近开关与风机控制系统电连接。当净空保护控制箱移动到接近开关位置时,接近开关会给风机控制系统信号,此时风机控制系统对净空保护控制箱进行偏差校准,消除净空保护控制箱长时间运行产生的与风机机舱间的累计误差。从而叶尖形变报警传感器始终与叶尖对应。
16.一种风力发电机组叶片净空保护方法,包括以下步骤:
17.叶尖形变报警传感器收到外力而发生形变时,将变形开关信号发送至净空保护控制箱;
18.净空保护控制箱通过无线接收器将变形开关信号发送至风机控制系统;
19.风机控制系统发出停机指令,风机收桨停机。
20.本发明可以实现通过形变开关传感器测量叶片净空是否在安全范围内,测量信号为纯机械性质,不受天气、环境及电磁干扰的影响,能够可靠保证机组的叶片净空安全。
21.作为本发明的优选方案,还包括以下步骤:
22.风机控制系统在根据风向传感器的风向信号给出风机偏航指令时,同步给净空保护控制箱启动指令,保持叶尖形变报警传感器与风机机头同速、同向运行。叶尖形变报警传感器与风机机头同步动作,从而叶尖变形传感器始终处于能检测叶尖形变的位置上。
23.作为本发明的优选方案,还包括以下步骤:
24.风机的塔筒上安装接近开关,当净空保护控制箱移动到接近开关位置时,风机控制系统对净空保护控制箱进行偏差校准。风机控制系统对净空保护控制箱进行偏差校准,消除净空保护控制箱长时间运行产生的与风机机舱间的累计误差,避免叶尖形变报警传感器与风机机头错开的情况。
25.本发明的有益效果为:
26.1.本发明的叶尖形变报警传感器前段受外力而产生形变时,该变形信号发送至净
空保护控制箱,净空保护控制箱再通过无线接收器将变形信号发送至风机控制系统。风机控制系统接收到该信号变化后会立即发出停机指令,风机收桨停机,以免发生更大的形变出现叶尖扫塔的危险,保护风机安全。本发明实现通过形变开关传感器测量叶片净空是否在安全范围内,测量信号为纯机械性质,不受天气、环境及电磁干扰的影响,能够可靠保证机组的叶片净空安全。
27.2.本发明可以实现叶尖形变报警传感器随机舱偏航同步动作,同时在动作过程中根据接近开关信号进行累积误差消除,保证叶尖形变报警传感器和风轮表面垂直。
28.3.本发明实现了塔筒外和塔筒内信号的无线传输,解决了难度非常大的塔筒外设备布线和走线工作,不存在线缆问题导致的系统故障,极大的提高系统的可靠性。
附图说明
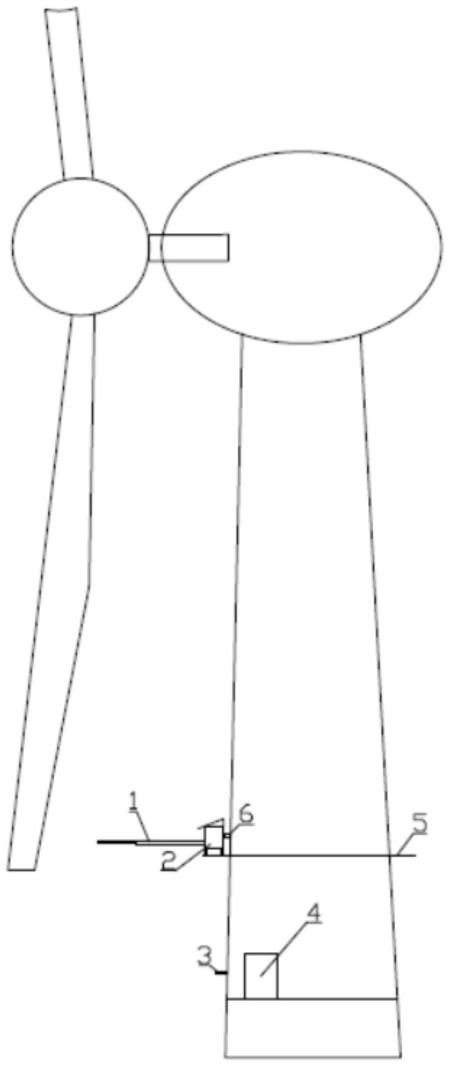
29.图1是本发明的结构示意图;
30.图2是本发明的部分结构图;
31.图3是叶尖形变报警传感器的结构示意图。
32.图中:1-叶尖形变报警传感器;2-净空保护控制箱;3-无线接收器;4-风机控制系统;5-环形轨道;6-接近开关。
具体实施方式
33.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
34.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
35.风机包括塔基,塔基上安装塔筒,塔筒的另一端通过轴承连接有机头,机头上安装桨叶,机头的转轴与塔筒垂直。
36.如图1和图2所示,本实施例的风力发电机组叶片净空保护系统,包括净空保护控制箱2,净空保护控制箱2上设置有滚轮,风机的塔筒上设置有环形轨道5,滚轮设置于环形轨道5内;所述净空保护控制箱2上安装有叶尖形变报警传感器1,叶尖形变报警传感器1对应于风机的桨叶叶尖设置;风机的塔基外安装有无线接收器3,机舱或塔基上安装有风机控制系统4,风机控制系统4为风机自带的主控系统,净空保护控制箱2与无线接收器3通信连接,无线接收器3与风机控制系统4电连接。
37.本发明的叶尖形变报警传感器1前段受外力而产生形变时,其后段内开关传感器状态会发生变化。该变形开关信号通过埋设于叶尖形变报警传感器1内的线缆输出至净空保护控制箱2,净空保护控制箱2再通过无线接收器3将变形开关信号发送至风机控制系统4。风机控制系统4接收到该信号变化后会立即发出停机指令,风机收桨停机,以免发生更大
的形变出现叶尖扫塔的危险,保护风机安全。
38.其中,如图3所示,叶尖形变报警传感器1由绝缘材料制成,叶尖形变报警传感器1包括前段和后段。叶尖形变报警传感器1的前段朝向风机桨叶方向,为传感器的触发件。叶尖形变报警传感器1的后段安装于净空保护控制箱2上,后段内预先埋设了开关传感器。叶尖形变报警传感器1的长度根据需保护风机的安全净空距离进行设置。
39.环形轨道5采用截面为h型钢,采用焊接的方式固定在风机塔筒外壁,为净空保护控制箱2提供运动轨道。
40.具体地,所述净空保护控制箱2包括箱体,叶尖形变报警传感器1安装于箱体上,箱体内安装有控制器、无线发射器,叶尖形变报警传感器1与控制器电连接,控制器与无线发射器电连接,无线发射器与无线接收器3通信连接。叶尖形变报警传感器1将形变信号发送至控制器,控制器通过无线发射器将形变信号发送至无线接收器3,无线接收器3与风机控制系统4进行信号交互。
41.为了使叶尖变形报警传感器能跟随机头转动,所述净空保护控制箱2还包括驱动机构,滚轮连接于驱动机构的输出端上,控制器与驱动机构电连接。风机控制系统4电连接有风向传感器,风向传感器安装于风机机舱顶部,风机控制系统4电连接有用于控制叶轮方向的风机偏航系统。风机控制系统4根据风向传感器探测的风向控制风机机头方向,保证风机充分利用风力。此时,驱动机构可驱动净空保护控制箱2和叶尖形变报警传感器1转动,使叶尖形变报警传感器1和叶轮表面垂直,叶尖形变报警传感器1始终位于风电机组叶片净空区域内。
42.为了自动控制叶尖变形报警传感器跟随机头转动,所述控制器与驱动机构电连接。风机控制系统4在给出风机偏航指令时,会同步给净空保护控制箱2启动指令,从而驱动机构驱动净空保护控制箱2与风机机头同速、同向运行,方便自动控制叶尖形变报警传感器1与叶轮表面保持垂直。
43.更进一步,所述净空保护控制箱2还包括太阳能电池板,太阳能电池板安装于箱体顶部,太阳能电池板电连接有蓄电池,蓄电池电连接有配电开关,配电开关分别与控制器、无线发射器和驱动机构电连接。太阳能电池板为蓄电池充电,蓄电池通过配电开关为净空保护控制箱2内的设备提供电源。
44.需要注意的是,所述环形轨道5设置为与风机叶尖的最低位置等高,则叶尖形变报警传感器1与风机叶尖转动到最低位置时等高。根据风电机组叶片净空的定义,机组运行过程中叶尖到塔筒表面的最小距离为风电机组叶片净空。叶尖形变报警传感器1位于净空区域内,则叶尖形变报警传感器1能及时探测净空减小到设置的危险值,并由风机控制系统4控制风机停机,保证风机运行安全。
45.为了对叶尖形变报警传感器1进行偏差校准,风机的塔筒上还安装有接近开关6,接近开关6位于净空保护控制箱2的移动路径上,接近开关6与风机控制系统4电连接。当净空保护控制箱2移动到接近开关6位置时,接近开关6会给风机控制系统4信号,此时风机控制系统4对净空保护控制箱2进行偏差校准,消除净空保护控制箱2长时间运行产生的与风机机舱间的累计误差。从而叶尖形变报警传感器1始终与叶尖对应。
46.本实施例的风力发电机组叶片净空保护方法,包括以下步骤:
47.s1:叶尖形变报警传感器1受到外力而发生形变时,将变形信号发送至净空保护控
制箱2;
48.s2:净空保护控制箱2通过无线接收器3将变形信号发送至风机控制系统4;
49.s3:风机控制系统4发出停机指令,风机收桨停机;
50.s4:风机控制系统4在根据风向传感器的风向信号给出风机偏航指令时,同步给净空保护控制箱2启动指令,保持叶尖形变报警传感器1与风机机头同速、同向运行;
51.s5:风机的塔筒上安装接近开关6,当净空保护控制箱2移动到接近开关6位置时,风机控制系统4对净空保护控制箱2进行偏差校准。
52.叶轮转动过程中,由于风载的变化导致叶尖与叶尖形变报警传感器1的柔性段接触,叶尖形变报警传感器1内的开关传感器会发生信号状态变化,该信号变化通过净空保护控制箱2传递给风机控制系统4,风机控制系统4接收到该信号变化后会立即发出停机指令,风机收桨停机,以免发生更大的形变出现叶尖扫塔的危险,保护风机安全。
53.风机控制系统4在给出风机偏航指令时会同步给净空保护控制箱2启动指令,保持净空保护控制箱2与风机机头同速、同向运行,使叶尖形变报警传感器1和叶轮表面垂直,当偏航结束时风机控制系统4会同步停止净空保护控制箱2的运行。
54.当净空保护控制箱2移动到接近开关6时,接近开关6会给风机控制系统4信号,此时风机控制系统4对净空保护控制箱2进行偏差校准,消除净空保护控制箱2长时间运行产生的与风机机舱间的累计误差,避免叶尖形变报警传感器1与风机机头错开的情况。
55.本发明可以实现叶尖形变报警传感器1随机舱偏航同步动作,同时在动作过程中根据接近开关6信号进行累积误差消除,保证叶尖形变报警传感器1和风轮表面垂直。
56.本发明实现了塔筒外和塔筒内信号的无线传输,解决了难度非常大的塔筒外设备布线和走线工作,不存在线缆问题导致的系统故障,极大的提高系统的可靠性。
57.本发明实现通过形变开关传感器测量叶片净空是否在安全范围内,测量信号为纯机械性质,不受天气、环境及电磁干扰的影响,能够可靠保证机组的叶片净空安全。
58.本发明不局限于上述可选实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本发明权利要求界定范围内的技术方案,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1