风电机组超速保护系统台位测试方法及系统与流程
1.本发明涉及风电机组超速保护技术领域,具体地涉及一种风电机组超速保护系统台位测试方法以及一种风电机组超速保护系统台位测试系统。
背景技术:
2.近年来,可再生能源特别是风力能源得到了世界各国的大力推广与应用,风电机组的安全运行与保护在风力发电过程中尤为重要。随着风电机组运行时间逐渐增长,由于不同原因导致出现风电机组超速的现象越来越多,甚至出现了因为超速而导致倒塔等严重事故的发生。当出现超速时,风电机组控制系统必须能及时进行停机等保护动作,超速保护系统应运而生。为验证风电机组的超速保护系统的功能是否完好,就必须要对超速保护系统进行测试。
3.目前现场进行兆瓦级风电机组超速保护系统测试,需要将风电机组的转速调节至超速运行状态,然后通过判断超速保护系统是否正常动作,以达到检测超速保护系统是否正常的目的。这样的检测方式,由于风电机组需要进行超速运行,会对风电机组造成一定的损伤,风险较大。故现有的测试方法存在缺陷。
4.为了克服上述问题,迫切需要设计一种风电机组超速保护系统的台位测试方法,避免风电机组因超速保护系统测试对风电机组传动部件造成损伤,确保风电机组运行安全。
技术实现要素:
5.本发明实施方式的目的是提供一种风电机组超速保护系统台位测试方法以及一种风电机组超速保护系统台位测试系统;本发明采用反拖法,使用变频器对发电机进行控制,使得所述发电机处于电动机状态,并带动风力发电机组传动链转动,从而使得叶轮空转;发电机能够对转速进行控制,以实现对风力发电机组的保护。
6.为了实现上述目的,本发明第一方面提供一种风电机组超速保护系统台位测试方法,所述方法包括:
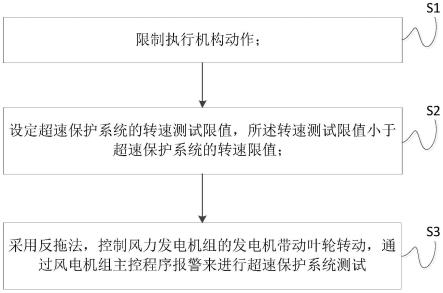
7.限制执行机构动作;
8.设定超速保护系统的转速测试限值,所述转速测试限值小于超速保护系统的转速限值;
9.采用反拖法,使得风力发电机组的发电机带动叶轮转动,通过风电机组主控程序报警来进行超速保护系统测试。
10.优选的,超速保护系统测试包括安全链叶轮超速报警测试以及高速轴刹车测试。
11.优选的,安全链叶轮超速报警测试具体为:
12.在风力发电机组正常运行的情况下,叶轮转速逐渐提升,当叶轮转速提升至安全链报警限值时,若风力发电机组发出安全链超速故障的报警,且风力发电机组紧急停机,则安全链叶轮超速报警测试通过。
13.优选的,高速轴刹车测试具体为:
14.当风力发电机组紧急停机时,叶轮转速逐渐降低,当叶轮转速降低至高速轴刹车限值时,若风力发电机组高速轴刹车点位熄灭,则高速轴刹车测试通过。
15.优选的,所述执行机构为偏航机构以及高速轴刹车机构;
16.限制执行机构动作具体为:
17.将偏航压力释放至零以及将高速轴刹车压力释放至零。
18.优选的,所述反拖法具体为:使用变频器对发电机进行控制,使得所述发电机处于电动机状态,并带动风力发电机组传动链转动,从而使得叶轮空转,实现反拖。
19.优选的,在对超速保护系统测试之前,确保风力发电机组的刹车盘能够手动转动。
20.优选的,在对超速保护系统测试之前,启动风力发电机组的冷却设备;以及确定风力发电机组其他设备参数正常。
21.第二方面,提供一种风电机组超速保护系统台位测试系统,包括:
22.调整单元,用于将风力发电机组偏航压力释放至零以及将高速轴刹车压力释放至零;
23.数值设定单元,用于设定转速测试限值,所述转速测试限制小于超速保护系统的转速限值;
24.反拖驱动单元,用于通过变频器控制发电机带动传动链转动,从而实现叶轮空转;
25.报警监测单元,用于监测安全链超速故障的报警状态以及高速轴刹车点位状态。
26.第三方面,提供一种计算机可读储存介质,存储有计算机指令,当所述计算机指令在计算机上运行时,使得计算机执行所述的风电机组超速保护系统台位测试方法。
27.本发明采用反拖法,使用变频器对发电机进行控制,使得所述发电机处于电动机状态,并带动风力发电机组传动链转动,从而使得叶轮空转;发电机能够对转速进行控制,以实现对风力发电机组的保护。
28.本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
29.附图是用来提供对本发明实施方式的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施方式,但并不构成对本发明实施方式的限制。在附图中:
30.图1是本发明一种实施方式提供的风电机组超速保护系统台位测试方法流程图;
31.图2是本发明一种实施方式提供的风电机组超速保护系统台位测试系统框图。
具体实施方式
32.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
33.图1是本发明一种实施方式提供的风电机组超速保护系统台位测试方法流程图。如图1所示,本发明实施方式本发明提供一种风电机组超速保护系统台位测试方法,所述方法包括:
34.s1:限制执行机构动作。
35.在本实施例中,所述执行机构为偏航机构以及高速轴刹车机构,限制执行机构动作具体为:将偏航压力释放至零以及将高速轴刹车压力释放至零。
36.在本实施例中,当高速轴刹车压力释放为零时,高速轴刹车机构无法执行刹车抱闸动作。风力发电机组能够接收到高速轴刹车点位信号,当高速轴刹车点位熄灭时,说明高速轴刹车机构能够正常抱闸刹车,高速轴刹车机构设置的高速轴刹车限值有效;当高速轴刹车点位未熄灭时,说明高速轴刹车机构未能抱闸刹车,高速轴刹车机构设置的高速轴刹车限值无效。
37.限制高速轴刹车机构动作,用于避免在测试过程中高速轴进行抱闸动作,对风力发电机组造成损伤。保证了风电机组在整个测试过程中的安全。
38.同理,当偏航压力释放为零时,偏航机构无法执行偏航动作。风力发电机组只能接收到偏航信号,而偏航机构并不执行偏航动作,通过偏航信号判断偏航机构是否能正常执行。具体的,当风力发电机组的主控柜接收到偏航信号时,说明偏航机构能够正常执行。
39.因为偏航机构的制动器与高速轴刹车机构的制动器由同一个液压站控制,所以在限制高速轴刹车时也要限制偏航机构。
40.s2:设定超速保护系统的转速测试限值,所述转速测试限值小于超速保护系统的转速限值;
41.在本实施中,通过设置超速保护系统中的转速传感器的报警触发值,来实现设定转速测试限值。转速测试限值即为测试过程中的转速传感器的报警触发值;转速限值即为实际运用中的转速传感器的报警触发值。转速测试限值低于超速保护系统中原本的转速限值,即在测试过程中,风力发电机组只需在较低的转速下测试超速保护系统是否有效,不会真正影响超速保护系统以及风力发电机组的动作,进一步保证风力发电机组在整个测试中的安全。
42.而本发明只需修改转速传感器的报警触发值,无需修改风力发电机组的主控程序的参数,操作更加简单。
43.s3:采用反拖法,控制风力发电机组的发电机带动叶轮转动,通过风电机组主控程序报警来进行超速保护系统测试。
44.在本实施例中,超速保护系统测试包括安全链叶轮超速报警测试以及高速轴刹车测试。
45.在本实施例中,安全链叶轮超速报警测试具体为:
46.风力发电机组正常运行,叶轮转速在发电机的作用下逐渐提升,当叶轮转速提升至安全链报警限值时,若风力发电机组发出安全链超速故障的报警,且风力发电机组紧急停机,则安全链叶轮超速报警测试通过,安全链报警限值有效,安全链叶轮超速报警功能有效。若风力发电机组未发出安全链超速故障的报警,且风力发电机组未停机,则判定安全链叶轮超速报警测试不通过,安全链报警限值无效,安全链叶轮超速报警功能故障。
47.具体的,在本实施例中,由风力发电机组主控程序实时监测叶轮转速,判断叶轮转速是否提升至安全链报警限值;由风力发电机组主控柜接收安全链叶轮超速报警信号,并输出。
48.在本实施例中,高速轴刹车测试具体为:
49.当风力发电机组紧急停机时,叶轮转速逐渐降低,当叶轮转速降低至高速轴刹车
限值时,若风力发电机组高速轴刹车点位熄灭,则高速轴刹车测试通过,高速轴刹车限值有效,高速轴刹车机构刹车功能有效。若风力发电机组高速轴刹车点位未熄灭,则高速轴刹车测试不通过,高速轴刹车限值无效,高速轴刹车机构刹车功能无效。
50.具体的,在本实施例中,叶轮转速在惯性作用下逐步降低,由风力发电机组主控程序实时监测叶轮转速,判断叶轮转速是否降低至高速刹车限值;风力发电机组主控柜显示高速轴刹车点位是否熄灭。
51.在本实施例中,完成高速轴刹车测试后,叶轮转速逐渐降低为零。后需要对转速测试限值进行修改,使其等于超速保护系统中的转速限值,修改完毕后,测试方为结束。
52.在本实施例中,所述反拖法具体为:使用变频器对发电机进行控制,使得所述发电机处于电动机状态,并带动风力发电机组传动链转动,从而使得叶轮空转,实现反拖。采用反拖法,使得发电机带动叶轮转动,能够对风力发电机组转速进行控制,以实现对风力发电机组的保护。
53.在风力发电机组反拖运行后,检查风力发电机组的运行状态,如果有故障报出,则需要先进行故障排查,以确保风力发电机组的其他设备正常工作,保证超速保护系统测试的有效性。
54.在本实施例中,在对超速保护系统测试之前,确保风力发电机组的刹车盘能够手动转动。以确保在测试过程中,能够人工控制传动链以及叶轮的转动。
55.在本实施例中,在对超速保护系统测试之前,启动风力发电机组的冷却设备;并检查风力发电机组其他设备,以确保设备参数正常。
56.本发明的测试场景为工厂,即不需要在叶轮上安装叶片,仅在机舱内测试,安全性能更高。
57.图2是本发明一种实施方式提供的风电机组超速保护系统台位测试系统框图。如图2所示,提供一种风电机组超速保护系统台位测试系统,包括:
58.调整单元,用于将风力发电机组偏航压力释放至零以及将高速轴刹车压力释放至零;
59.数值设定单元,用于设定转速测试限值,所述转速测试限制小于超速保护系统的转速限值;
60.反拖驱动单元,用于通过变频器控制发电机带动传动链转动,从而实现叶轮空转;
61.报警监测单元,用于监测安全链超速故障的报警状态以及高速轴刹车点位状态。
62.风力发电机组的主控柜通过程序设定,下发信号指令控制变频器对大电机进行控制,将发电机转换为电动机状态,以带动传动链转动,实现叶轮空转。
63.在本实施例中,还提供一种计算机可读储存介质,存储有计算机指令,当所述计算机指令在计算机上运行时,使得计算机执行所述的风电机组超速保护系统台位测试方法。
64.本领域技术人员可以理解实现上述实施方式的方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序存储在一个存储介质中,包括若干指令用以使得单片机、芯片或处理器(processor)执行本发明各个实施方式所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
65.以上结合附图详细描述了本发明的可选实施方式,但是,本发明实施方式并不限
于上述实施方式中的具体细节,在本发明实施方式的技术构思范围内,可以对本发明实施方式的技术方案进行多种简单变型,这些简单变型均属于本发明实施方式的保护范围。另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明实施方式对各种可能的组合方式不再另行说明。
66.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明实施方式的思想,其同样应当视为本发明实施方式所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1