基于气动系数的风力机风速时间参数确定方法
1.本技术涉及风力发电技术领域,具体地涉及一种基于气动系数的风力机风速时间参数确定方法。
背景技术:
2.工业全球化以来,能源消耗量逐年增长,其中化石能源在全球能源消费总量占比仍然超过50%,化石能源的过度使用给气候环境等方面带来严峻的考验,能源问题越来越成为全球重点关注问题。以风能为代表的新能源和可再生能源被视为未来能源,风能的高效利用成为解决能源问题的关键。
3.如果能实时获得风轮平面有效风速和提前对风轮平面有效风速进行预测,将会提高风力机的控制性能,进而提高风力机效率,降低风力机载荷,达到提高风力机寿命的目的。风具有随机性和波动性,同时受地形、大气环流、温度等多种因素的影响,风信号不像风力机转速、桨距角功率等信号可以有效测量。目前测风设备主要包括:风速风向计、测风塔、皮托管及激光雷达测风仪等,风力机机舱上测风设备多为风速风向计,存在测量滞后、误差较大等缺点,成为制约风力机控制性能提高的重要因素。
4.激光雷达测风仪作为新兴的测风设备,具有提前测风、可以预测阵风等优势,越来越得到风力机整机生产厂家的青睐。但由于激光雷达只能测量风力机风轮前方一定距离处的风速,激光雷达测风数据需要进行二次处理才能用到风力机主控上。激光雷达测风数据幅值通过风速演化模型处理,相位通过泰勒冻结假设处理,处理结果精度较差,不利于发挥激光雷达的性能。
5.目前,虽然部分研究证明激光雷达在风力机的应用优势,但尚没有成熟的激光雷达测风仪在风力机应用上的方法。
技术实现要素:
6.为了克服现有技术的不足,本发明通过建立风力机的气动系数迭代模型和风速迭代模型实现了气动系数的实时迭代更新,完成了对激光雷达测风数据进行处理,获得风轮平面有效风力机期望位置处风速时间序列参数,用于实现风力机的实时控制,提高了风力机的发电效率。
7.为实现上述目的,本发明所采用的解决方案为:
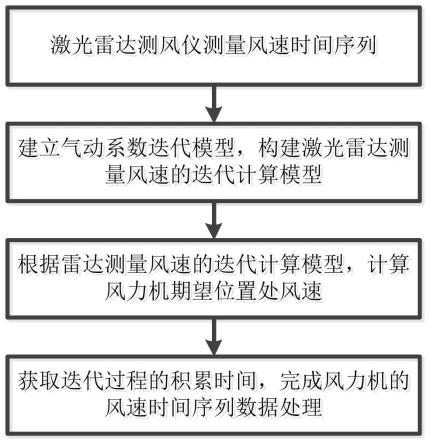
8.一种基于气动系数的风力机风速时间参数确定方法,其包括以下步骤:
9.步骤1:激光雷达测风仪测量风速时间序列;
10.通过风力机上的机舱式激光雷达测风仪测量设定位置处的风速时间序列数据v0、v1…
vi、v
i+1
…
,激光雷达测风仪每间隔t秒获得一次设定位置处的风速时间序列数据,时间序列数据时间间隔为t;
11.步骤2:建立气动系数迭代模型,构建激光雷达测量风速的迭代计算模型;
12.步骤21:确定风力机的时限要求;
13.步骤22:风力机的气动系数计算模型如下所示:
[0014][0015]
式中:k
i,j
表示i序列测量风速对应j次迭代风力机的气动系数,k
i,0
表示i序列测量风速对应的初始化气动系数;a、b、c和d分别表示气动系数与总推力系数关系的第一系数、第二系数、第三系数和第四系数;c
ti,j
表示i序列测量风速对应j次迭代总推力系数;i表示激光雷达测量风速序列;j表示i序列测量风速对应系数的迭代次数,j从0开始,每次迭代开始先自增1;
[0016]
步骤23:构造风速测量的距离迭代模型如下所示:
[0017]yi,j
=y
i,j-1-v
i,j-1
×
t;
[0018]
式中:y
i,j
表示v
i,j
位置与风轮平面位置的距离,y
i,0
表示vi位置与期望位置的距离;y
i,j-1
表示v
i,j-1
位置与风轮平面位置的距离;v
i,j-1
表示i序列测量风速j-1次迭代风速;t表示激光雷达测风时间序列数据时间间隔,为时间限定值;
[0019]
步骤24:激光雷达测量风速的迭代计算模型如下所示:
[0020][0021]
式中:v
i,j
表示i序列测量风速j次迭代风速,v
i,0
等于激光雷达测风仪测量风速时间序列数据vi;r表示风力机的风轮半径;k
i,j-1
表示i序列测量风速对应j-1次迭代风力机的气动系数;
[0022]
步骤3:根据雷达测量风速的迭代计算模型,计算风力机期望位置处风速;
[0023]
根据步骤2中的激光雷达测量风速的迭代计算模型,确定风力机风轮中心处风速,如下所示:
[0024][0025]
式中:表示vi经处理得到的风力机期望位置处风速;k
i,j+1
表示i序列测量风速对应j-1次迭代风力机的气动系数;步骤4:获取迭代过程的积累时间,完成风力机的风速时间序列数据处理;
[0026]
根据步骤2和步骤3积累时间信息,得到与风力机期望位置处风速对应的时间信息ti;步骤3所需时间t
i,last
的获取方法如下所示:
[0027][0028]
式中:t
i,last
表示i序列测量风速经步骤3处理所需时间;d表示风力机期望位置距风轮平面的距离;
[0029]
进一步得到,风力机期望位置处风速对应的时间信息ti,如下所示:
[0030]
ti=(i+j)
×
t+t
i,last
;
[0031]
式中:ti表示风速对应的时间信息。
[0032]
可优选的是,所述步骤21中的确定风力机的时限要求,具体为:
[0033]
验证激光雷达测量设定位置处的风速是否能在时间t内到达期望位置,如下所示:
[0034][0035]
式中:t表示激光雷达测风时间序列数据时间间隔,为时间限定值;
[0036]
上述不等式成立时,表明处理过程风速v
i,j
不能在t时间内到达期望位置,进行步骤2;上述不等式不成立时,表明处理过程风速v
i,j
能在t时间内到达期望位置,退出步骤2。
[0037]
可优选的是,所述步骤22中总推力系数计算方法,具体为:
[0038]
步骤221:调整激光雷达测风仪和scada系统同步测量数据;
[0039]
步骤222:总推力系数的计算模型如下所示:
[0040][0041]
式中:σ表示风力机的实度;δ表示风力机升力曲线斜率;λ
i+j
表示i+j序列测量风速v
i+j
对应叶尖速比;β
i+j
表示i+j序列测量风速v
i+j
对应桨距角,实际应用中从风力机scada系统获取;γ
i+j
表示i+j序列测量风速v
i+j
对应偏航角,从风力机scada系统获取;a
i,j
表示i序列测量风速j次迭代诱导系数,a
i,0
表示初始化诱导系数。
[0042]
可优选的是,所述步骤222中叶尖速比迭代公式如下所示:
[0043][0044]
式中:ω
i+j
表示i+j序列测量风速v
i+j
对应风轮转速,从风力机scada系统获取。
[0045]
可优选的是,所述步骤222中诱导系数迭代公式如下所示:
[0046][0047]
式中:θ
i+j
表示i+j序列测量风速v
i+j
对应风轮偏角,从风力机scada系统获取;θ
i+j-1
表示i+j-1序列测量风速v
i+j-1
对应风轮偏角;λ
i+j-1
表示i+j-1序列测量风速v
i+j-1
对应叶尖速比;β表示风力机的桨距角;a
i,j-1
表示i序列测量风速j-1次迭代诱导系数。与现有技术相比,本发明的有益效果在于:
[0048]
(1)本发明通过建立风力机的气动系数迭代模型和风速迭代模型实现了风力机气动系数的实时迭代更新计算,完成了对激光雷达测风数据进行处理,获得风轮平面有效风力机期望位置处风速时间序列参数;
[0049]
(2)本发明计算的风力发电机期望位置处风速时间序列数据,根据风力机当前状态实时迭代计算,能够获得风力机实时风速时间序列的准确数据,能够用于风力发电机的实时控制,能够提高风力发电机的发电效率,有效降低风力发电机所受的载荷。
附图说明
[0050]
图1为本发明实施例基于气动系数的风力机风速时间参数确定方法的控制框图;
[0051]
图2为本发明实施例机舱式激光雷达测风仪示意图;
[0052]
图3为本发明实施例激光雷达测量风速的迭代计算模型的流程图;
[0053]
图4为本发明实施例序列风速迭代次数随时间变化示意图;
[0054]
图5为本发明实施例基于气动系数实时迭代更新的风速处理算法处理结果示意图。
具体实施方式
[0055]
以下,参照附图对本发明的实施方式进行说明。
[0056]
本发明以风力发电机为应用实例,实现基于气动系数的风力机风速时间参数确定方法的实际应用,通过建立风力发电机的气动系数迭代模型和风速迭代模型实现了风力发电机气动系数的实时迭代更新计算,完成了对激光雷达测风数据进行处理,获得风轮平面有效风力发电机期望位置处风速和风速时间序列数据,实现风力发电机的实时控制,能够提高风力发电机的发电效率,有效降低风力发电机所受的载荷,大大提高风力发电机的使用寿命。
[0057]
如图1所示,本发明实施例提供了一种基于气动系数的风力机风速时间参数确定方法,为了证明本发明的适用性,将其应用于实例,具体包含如下步骤:
[0058]
s1:激光雷达测风仪测量风速时间序列;
[0059]
如图2所示为本发明实施例机舱式激光雷达测风仪示意图,通过风力发电机上的机舱式激光雷达测风仪测量设定位置处的风速时间序列数据v0、v1…
vi、v
i+1
…
,激光雷达测风仪每间隔t秒获得一次设定位置处的风速时间序列数据,即时间序列数据时间间隔为t。s2:建立气动系数迭代模型,构建激光雷达测量风速的迭代计算模型,如图3所示。
[0060]
s21:确定风力发电机的时限要求。
[0061]
验证激光雷达测量的风速是否能在时间t内到达风轮平面,如下所示:
[0062][0063]
式中:y
i,j
表示v
i,j
位置与风轮平面位置的距离,y
i,0
表示vi位置与期望位置的距离;v
i,j
表示i序列测量风速j次迭代风速,v
i,0
等于激光雷达测风仪测量风速时间序列数据vi;t表示激光雷达测风时间序列数据时间间隔,为时间限定值;d表示风力机期望位置距风轮平面的距离。
[0064]
上述不等式成立时,表明处理过程风速v
i,j
不能在t时间内到达期望位置,进行s2;上述不等式不成立时,表明处理过程风速v
i,j
能在t时间内到达期望位置,退出s2。
[0065]
s22:风力发电机的气动系数计算模型如下所示:
[0066][0067]
式中:k
i,j
表示i序列测量风速对应j次迭代风力机的气动系数,k
i,0
表示i序列测量风速对应的初始化气动系数;a、b、c和d分别表示气动系数与总推力系数关系的第一系数、第二系数、第三系数和第四系数;c
ti,j
表示i序列测量风速对应j次迭代总推力系数;i表示
激光雷达测量风速序列;j表示i序列测量风速对应系数的迭代次数,j从0开始,每次迭代开始先自增1。
[0068]
总推力系数计算方法,具体为:
[0069]
s221:调整激光雷达测风仪和scada系统同步测量数据;
[0070]
实际应用中激光雷达测风数据须与风力发电机scada数据进行同步,来获得实时桨距角β
i+j
,偏航角γ
i+j
,风轮偏角θ
i+j
,风轮转速ω
i+j
。
[0071]
s222:总推力系数的计算模型如下所示:
[0072][0073]
式中:σ表示风力发电机的实度,本实例中,σ设置为固定值0.092;δ表示风力发电机升力曲线斜率,本实例中,δ设置为固定值0.005;λ
i+j
表示i+j序列测量风速v
i+j
对应叶尖速比;β
i+j
表示i+j序列测量风速v
i+j
对应桨距角,本实例中,β
i+j
根据序列风速v
i+j
设置;γ
i+j
表示i+j序列测量风速v
i+j
对应偏航角,本实例中,γ
i+j
等于固定值0;a
i,j
表示i序列测量风速j次迭代诱导系数,本实例中,初始化诱导系数a
i,0
为0.1。
[0074]
叶尖速比迭代公式如下所示:
[0075][0076]
式中:ω
i+j
表示i+j序列测量风速v
i+j
对应风轮转速,本实例中,ω
i+j
根据序列风速v
i+j
设置;
[0077]
诱导系数迭代公式如下所示:
[0078][0079]
式中:θ
i+j
表示i+j序列测量风速v
i+j
对应风轮偏角,本实例中,θ
i+j
设置为固定值0。
[0080]
s23:构造风速测量的距离迭代模型如下所示:
[0081]yi,j
=y
i,j-1-v
i,j-1
×
t;
[0082]
式中:y
i,j
表示v
i,j
位置与风轮平面位置的距离,y
i,0
表示vi位置与期望位置的距离;v
i,j-1
表示i序列测量风速j-1次迭代风速;y
i,j-1
表示v
i,j-1
位置与风轮平面位置的距离;。
[0083]
本实例中,ω、β根据风力发电机切入风速、额定风速、切出风速计算,具体为,序列风速v
i+j
<2.5时,ω
i+j
=0、β
i+j
=0;序列风速2.5≤v
i+j
<8.3时,ω
i+j
=1750
×
π
×
(v
i+j-2.5)/(5.8
×
30)、β
i+j
=0;序列风速8.3≤v
i+j
<20时,ω
i+j
=175π/3、β
i+j
=8;序列风速v
i+j
≥20时,ω
i+j
=0、β
i+j
=0。
[0084]
s24:激光雷达测量风速的迭代计算模型如下所示:
[0085]
[0086]
式中:r表示风力发电机的风轮半径,本实例中,风力机半径为73.5m。
[0087]
s3:根据雷达测量风速的迭代计算模型,计算风力发电机风轮中心处风速;
[0088]
根据s2中的激光雷达测量风速的迭代计算模型,确定风力发电机风轮中心处风速,如下所示:
[0089][0090]
式中:表示vi经处理得到的风力发电机期望位置处风速。
[0091]
s4:获取迭代过程的积累时间,完成风力发电机的风速时间序列数据处理。
[0092]
根据迭代过程积累时间信息,得到与风力发电机期望位置处风速对应的时间信息ti;测量风速最后一次迭代所需时间t
i,last
的获取方法如下所示:
[0093][0094]
式中:t
i,last
表示i序列测量风速最后一次迭代所需时间;d表示风力发电机期望位置距风轮平面的距离;本实例中,d取值为50m。
[0095]
进一步得到,风力发电机期望位置处风速对应的时间信息ti,如下所示:
[0096]
ti=(i+j)
×
t+t
i,last
;
[0097]
式中:ti表示风速对应的时间信息。
[0098]
引入拟合优度评估算法效果,具体过程如下所示:
[0099]
拟合优度的计算方法如下所示:
[0100][0101]
式中:表示拟合优度的计算结果;ess表示回归平方和;tss表示总平方和;rss表示残差平方和。
[0102]
回归平方和的计算方法如下所示:
[0103][0104]
式中:为上述步骤四风速处理算法处理后风速;为激光雷达测量风速平均值;n表示风力发电机期望位置处风速序列。
[0105]
总平方和的计算方法如下所示:
[0106][0107]
式中:vn为激光雷达测量风速序列。
[0108]
按机舱式激光雷达测风仪测量设定位置为250m,期望风速位置为50m,进行分析计算,结果如下表所示,表明本发明实际应用效果较好;序列量为50000时,序列风速迭代次数随时间变化示意图如图4所示,基于气动系数实时迭代更新的风速处理算法处理结果示意
图如图5所示。表1中列出了本方法应用前和应用后的评估标准对比情况,评估标准越大表明实际应用效果更好,通过对序列量2000、10000和50000的对比数据表明,应用后评估标准分别为0.26、0.79和0.85,均大于应用前的评估标准,表明本方法的实际应用效果较好。
[0109]
表1应用前与应用后的效果对比
[0110][0111]
综上,本案例的预测结果证明了具有很好的效果;
[0112]
(1)本发明实施例通过建立风力发电机的气动系数迭代模型和风速迭代模型实现了风力发电机气动系数的实时迭代更新计算,完成了对激光雷达测风数据进行处理,获得风轮平面有效风力发电机期望位置处风速时间序列数据;通过拟合优度评估算法进行分析表明本方法的应用效果较好,测风准确度显著提高。
[0113]
(2)本发明实施例计算的风力发电机期望位置处风速时间序列数据,根据风力机当前状态实时迭代计算,能够获得风力机实时风速时间序列的准确数据,能够用于风力发电机的实时控制,实施例证明本方法能够满足实际应用需求。
[0114]
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1