一种多自由度波浪能回收装置及其建模方法
本发明属于海洋能量回收领域,具体为一种多自由度波浪能回收装置及其建模方法。
背景技术:
1、随着对化石燃料的开采和全球变暖的影响,人们将目光投向了可再生能源。在众多的可再生能源中,波浪能因其能量密度高、全天可用性引起人们广泛的研究。据估计,波浪能的能量密度是太阳能的15~20倍,风能的5倍。近些年来,学者们围绕如何高效回收利用波浪能展开了大量的研究,但波浪能回收装置一直未能商业化,主要聚焦在以下三个问题:1)装置不易安装,安装及维修成本高;2)装置自由度低,回收波浪方向存在较大局限性;3)装置整体能量回收效率低。
2、当前,大多数波浪能回收装置主要是:振荡水柱式、漫顶式、摩擦电式和振荡浮子式。振荡水柱式主要靠空气涡轮来将海水势能转变为电能,但空气涡轮转换效率较低,仅为10~30%。漫顶式必须安装在海岸防护结构或港口防波堤上,安装位置十分局限。摩擦电式适合水波为低频波时使用,但波浪是多种频率的波合成的,使用也十分局限,且摩擦电式如何固定在海洋中保证不会污染环境,也是需要考虑的。振荡浮子式结构简单,容易安装与固定,占整体波浪能回收装置的40%左右,被认为是最有可能实现商业化的结构。但是,当前研究的振荡浮子式结构仅仅考虑波浪垂荡方向的能量,在季风、地球自转等其他因素影响下,波浪在水平方向也具有较大的能量。
技术实现思路
1、基于上述背景技术,本发明提出了一种多自由度波浪能回收装置及其建模方法。根据波浪运动的特性,设计了一款用于回收垂荡、纵荡和横荡方向的多自由度波浪能回收装置。将波浪能回收装置固定在近海岸,通过浮子吸收波浪能,将波浪能转化成浮子的机械能,通过能量转换装置,将浮子的机械能转化成电能。同时,在海水运动模型和波浪能回收装置等效阻尼分析的基础上,提出了多自由度波浪能回收装置建模方法,建立了波浪能回收装置的数学模型,计算了波能回收装置转换效率。
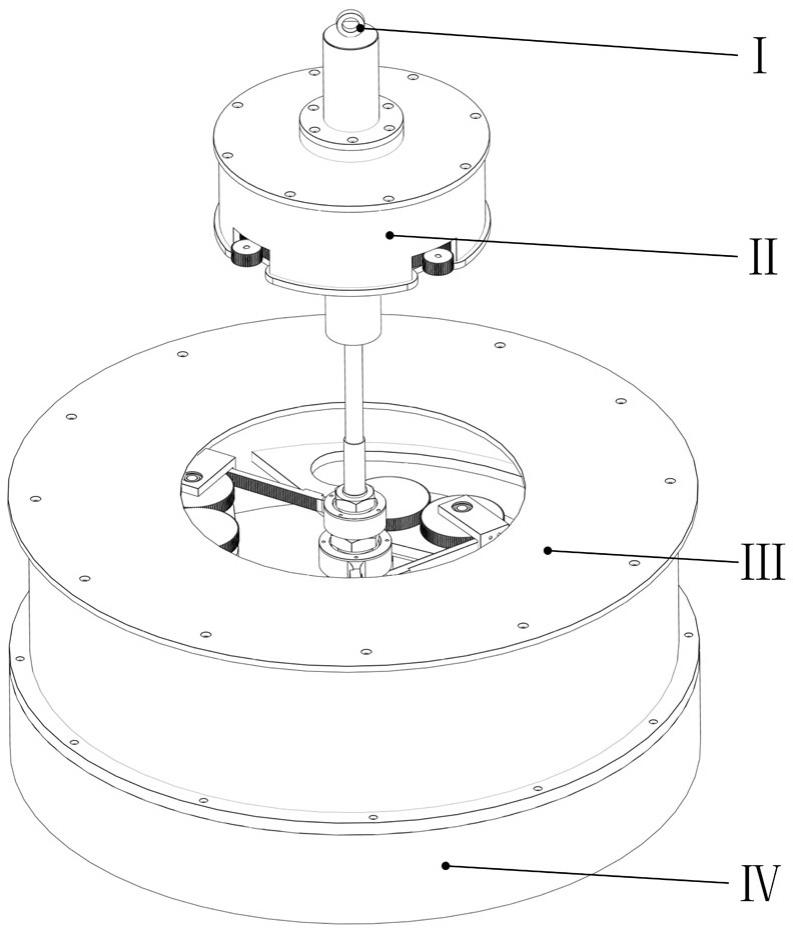
2、本发明是采用如下的技术方案实现的:一种多自由度波浪能回收装置,包括固定机构、垂直振动能量回收机构、水平移动能量回收机构和捕能机构,固定机构通过外部固定架固定于海上,垂直振动能量回收机构与固定机构通过螺栓固定连接,水平移动能量回收机构与捕能机构漂浮在海面上,捕能机构将波浪运动的波浪能转化成机械能;垂直振动能量回收机构和水平移动能量回收机构将捕能机构捕获的机械能转化成电能;
3、固定机构包括上盖;垂直振动能量回收机构包括直线轴承一、丝杠螺母、套筒、齿圈、滚珠丝杠、齿轮架、换向齿轮组一、中齿轮、大齿轮、小齿轮、圆柱滚子轴承、t型筒、下盖、上盖板一、角接触球轴承一、筒体、发电机一和下盖板;上盖板一、筒体和下盖板固定连接形成壳体,上盖固定在上盖板一上方,下盖固定在下盖板下方,上盖、下盖内都固定有直线轴承一,套筒上端与上盖板一之间装有角接触球轴承一,套筒下端与下盖板之间装有角接触球轴承一,位于套筒内的滚珠丝杠上端穿过上盖板一后与上盖内的直线轴承一完成装配,滚珠丝杠下端穿过下盖板后与下盖内的直线轴承一完成装配,丝杠螺母固定安装在套筒内部,滚珠丝杠与丝杠螺母配合连接,齿圈固定在套筒上,齿圈与换向齿轮组一的输入齿轮啮合,换向齿轮组一安装在齿轮架上,齿轮架固定在与t型筒端面,t型筒固定在下盖板上,实现齿轮架位置的固定,t型筒同时将套筒的下面部分套在其内部,换向齿轮组一中的输出齿轮与中齿轮啮合,中齿轮通过圆柱滚子轴承在安装t型筒外圆面上,大齿轮固定安装在中齿轮的下端面,同时大齿轮与小齿轮啮合,小齿轮连接壳体外的发电机一,发电机一通过发电机支架固定在下盖板上,
4、水平移动能量回收机构包括双列角接触球轴承、固定轴、上盖板二、角接触球轴承二、齿轮槽、齿条、导向杆、支架一、直线轴承二、支架二、发电机二、齿轮组架、换向齿轮组二;捕能机构包括浮子;上盖板二与齿轮组架通过螺栓连接,齿轮组架与浮子固定连接,保证齿轮组架可以跟随浮子进行运动;固定轴和滚珠丝杠固定一起,固定轴上位于齿轮组架内的轴体上安装有双列角接触球轴承,直线轴承内部装有导向杆,导向杆两端安装在支架一和支架二上,支架一和支架二固定在齿条上,齿条的一端和双列角接触球轴承连接,齿轮座固定在直线轴承端面,齿轮座内部装有换向齿轮组二和齿条,换向齿轮组二输入齿轮通过轴承二安装在齿轮座上,保证随波浪移动过程中,齿条始终与换向齿轮组二输入齿轮啮合,换向齿轮组二输出齿轮与发电机二固定连接,将机械能转变为电能。
5、上述的一种多自由度波浪能回收装置,换向齿轮组一包括齿轮轴一、齿轮一、垫圈一、螺钉一、单向轴承一、齿轮轴二、齿轮二、单向轴承二、螺钉二、垫圈二和齿轮三,齿轮轴一或齿轮轴二为输入齿轮,齿轮三为输出齿轮;齿轮轴一与齿轮轴二啮合连接,齿轮轴一通过单向轴承一与齿轮一连接,齿轮轴二通过单向轴承二与齿轮二连接,齿轮轴一末端安装有垫圈和螺钉一,齿轮轴二末端安装有垫圈二和螺钉二,齿轮一与齿轮二分别与齿轮三啮合连接,齿轮三与中齿轮啮合,实现单向转动输出;
6、换向齿轮组二包括阶梯轴、键、齿轮四、齿轮五、单向轴承三、齿轮六、齿轮轴三、齿轮七和轴承固定螺母,齿轮四为输入齿轮,齿轮六为输出齿轮,阶梯轴通过轴承二安装在齿轮座上,齿轮四通过键安装在阶梯轴上,阶梯轴通过轴承安装在齿轮组架的隔板上,齿轮五通过单向轴承三安装在阶梯轴上;齿轮六与齿轮五啮合并且与发电机二连接;齿轮轴三与齿轮四啮合并且通过轴承安装在齿轮组架的隔板上,齿轮轴三和阶梯轴上都装有垫圈和轴承固定螺母,保证齿轮轴三和阶梯轴稳定的安装在齿轮组架的隔板上,齿轮轴三通过单向轴承与齿轮七连接,齿轮七与齿轮六啮合。
7、多自由度波浪能回收装置中,垂直振动能量回收机构用来吸收波浪垂向的能量,垂直振动能量通过固定轴传输到滚珠丝杠,当滚珠丝杠沿垂向方向向上运动时,按自上往下看,丝杠螺母逆时针转动,齿圈逆时针转动,换向齿轮组一输入齿轮逆时针转动,换向齿轮组一输出齿轮逆时针转动,中齿轮顺时针转动,大齿轮顺时针转动,小齿轮逆时针转动,发电机一端逆时针转动;当滚珠丝杠沿垂向方向向下运动时,按自上往下看,丝杠螺母顺时针转动,齿圈顺时针转动,换向齿轮组一输入齿轮顺时针转动,换向齿轮组一输出齿轮逆时针转动,中齿轮顺时针转动,大齿轮顺时针转动,小齿轮逆时针转动,发电机一端逆时针转动。垂直振动能量回收机构ii的设计不仅能够实现齿圈(齿圈)输入,太阳轮(大齿轮)输出,还能实现滚珠丝杠沿垂向上下移动,发电机一端始终逆时针转动,减少惯性损失。
8、多自由度波浪能回收装置中,水平移动能量回收机构用来吸收波浪水平能量,水平移动能量通过齿轮组架使得换向齿轮组二沿着齿条移动,当换向齿轮组二接近固定轴时,按自上往下看,换向齿轮组二中齿轮四逆时针转动,换向齿轮组二中齿轮六逆时针转动,发电机二端逆时针转动;当换向齿轮组二远离固定轴时,按自上往下看,换向齿轮组二中齿轮四顺时针转动,换向齿轮组二中齿轮六逆时针转动,发电机二端逆时针转动。水平移动能量回收机构的设计能够实现不管浮子朝什么方向移动,发电机二端总能有较高的、单向的转速。
9、上述的一种多自由度波浪能回收装置,上盖通过外部固定架与外部固定装置固定连接,能够使本发明设计的能量回收装置有效的固定在近海岸、轮船或岛屿附近,保证了波浪能量回收装置应用场景的可行性。
10、上述的一种多自由度波浪能回收装置,浮子选用圆柱形浮子,漂浮在海面上,随着波浪移动,与水平移动能量回收机构通过螺栓固定连接。
11、上述的一种多自由度波浪能回收装置,换向齿轮组一的数量为四个,固定轴上安装有三个双列角接触球轴承,因此换向齿轮组二的数量也为三个。
12、上述的一种多自由度波浪能回收装置,每个双列角接触球轴承外部设置有端盖,固定轴上在每个双列角接触球轴承的下方还安装有三个螺母,防止双列角接触球轴承在竖直方向上移动。
13、上述的一种多自由度波浪能回收装置的建模方法,垂直振动能量回收机构能量转化效率计算过程为:滚珠丝杠垂向位移表示为:其中,f0是波浪激振力的振幅,ρ是海水密度,g是重力加速度,a是浮子的截面积,ω是波浪频率,γ是波力分量的相角,σz是自由面位移与起伏面位移的相位角,ωz是波浪起伏圆频率,δz是无量纲起伏阻尼系数,
14、滚珠丝杠受到波浪激振力表示为其中,c是上绕射系数,h是波高,r是浮子半径,j1(kr)是一阶贝塞尔函数,k是波数,h是海水深度,d(t)是被淹没浮子深度;
15、滚珠丝杠在浮子的作用下产生上下移动,丝杠螺母的角速度表示为:其中l是滚珠丝杠的导程;
16、发电机一端角速度表示为ωt1=k1ωn,其中k1是从齿圈到发电机一的总传动比;
17、垂直振动能量回收机构的输出功率表示为:
18、其中,ce1是发电机一的电磁阻尼,re1是外部负载的电阻,ri1是发电机一的内部电阻;
19、垂直振动能量回收机构的输入功率表示为:
20、
21、
22、
23、
24、
25、其中,ω1是换向齿轮组一输入齿轮(齿轮轴一或齿轮轴二)的角速度,ηs是滚珠丝杠的传递效率,jz1是垂直振动能量回收模块总转动惯量,cz1是垂直振动能量回收模块总阻尼,z0是滚珠丝杠垂向位移的幅值;
26、依据垂直振动能量回收模块的输入功率和输出功率,可以得到垂直振动能量回收模块的能量转换效率,即:
27、上述的一种多自由度波浪能回收装置的建模方法,水平移动能量回收机构能量转换效率计算过程为:
28、浮子的运动表示为:三组齿条齿轮啮合点的位移为其中,r是换向齿轮组二输入齿轮的半径,l是浮子处于平衡位置时啮合点o1、o2、o3距离固定轴的距离,θ是浮子运动方向与y轴的夹角,(x1,y1)是x-y坐标系下o1的坐标,(x2,y2)是x-y坐标系下o2的坐标,(x2,y2)是x-y坐标系下o3的坐标,o1、o2、o3处发电机二端角速度表示为:ωt2_1=k2·|l1|′/r、ωt2_2=k2·|l2|′/r、ωt2_3=k2·|l3|′/r,其中k2是换向齿轮组二的传动比;
29、水平移动能量回收机构的输出功率表示为:
30、其中,ce2是发电机二的电磁阻尼,re2是外部负载的电阻,ri2是发电机二的内部电阻;
31、水平移动能量回收机构的输入功率表示为:
32、
33、
34、
35、其中,jz2是水平移动能量回收机构总转动惯量,cz2是水平移动能量回收机构总阻尼,f为水平方向波浪力;
36、依据水平移动能量回收机构的输入功率和输出功率,可得到水平移动能量回收机构的能量转换效率,即:
37、上述的一种多自由度波浪能回收装置的建模方法,多自由度波浪能回收装置整体的能量转换效率表示为:本发明的有益效果:
38、1.本发明的一种多自由度波浪能回收装置及其建模方法,通过外部固定架固定在近海、轮船或岛屿附近,安装简单,检修便捷。
39、2.多自由度波浪能回收装置中,垂直振动能量回收机构用来吸收波浪垂向的能量,主要由行星齿轮结构和滚珠丝杠组成。丝杠在垂向发生移动后,可以实现齿圈作为输入,太阳轮作为输出,达到增速的效果,保证了丝杠在垂向方向发生较小的移动,发电机一端可以产生较大的电能。
40、3.多自由度波浪能回收装置中,水平移动能量回收机构用来吸收波浪水平能量,主要由三条齿条和三组换向齿轮组二组成。浮子带着三组换向齿轮组二移动,三组换向齿轮组二和三条齿条均匀间隔分布,保证了浮子朝任何方向移动,发电机二处都能具有较大的发电能力。
41、4.在海水运动模型和波浪能回收装置等效阻尼分析基础上,提出了多自由度波浪能回收装置建模方法,建立了波浪能回收装置的数学模型,计算了波浪能回收装置转换效率,为类似波浪能回收装置的建模提供了重要参考。
- 还没有人留言评论。精彩留言会获得点赞!