阀正时控制装置的制作方法
本发明涉及阀正时控制装置。
背景技术:
1、作为在内燃机中通过电动机的驱动力来设定阀开闭时期(阀正时)的装置,专利文献1中记载了一种获取来自于曲轴转角传感器的曲轴转角信号,获取来自于凸轮角传感器的凸轮角信号,并基于上述曲轴转角信号和凸轮角信号计算阀正时控制装置(阀正时装置)的实际相位的装置。
2、专利文献1中记载的阀正时控制装置通过使电动机的旋转速度比凸轮轴的旋转速度相对更快而使阀开闭时期(阀正时)提前,通过使电动机的旋转速度比凸轮轴的旋转速度相对更慢而使阀开闭时期(阀正时)滞后。
3、此外,在专利文献1中,基于从通过曲轴转角信号检测到tdc(压缩上止点)的时间至检测出指定凸轮角信号为止的时间差来检测实际相位。
4、专利文献
5、专利文献1:日本特开2020-51349号公报
技术实现思路
1、如专利文献1中所记载,关于曲轴转角传感器,在与曲轴一体旋转的正时转子(timing rotor)上形成多个齿部,并具备在曲轴旋转时检测是否存在齿部的传感器。同样地,关于凸轮角传感器,在与凸轮轴(cam shaft)一体旋转的正时转子上形成多个齿部,并具备在凸轮轴旋转时检测是否存在齿部的传感器。
2、此外,在对阀正时控制装置的阀开闭时期(阀正时)进行控制的情况下,以下述方式控制电动机:反馈实际相位直至基于曲轴转角传感器的检测以及凸轮角传感器的检测而算出的实际相位达到目标相位。
3、然而,由于凸轮角传感器的检测方式为使用传感器检测直接连结于凸轮轴的正时转子的旋转角,因此,例如,在凸轮轴由于来自于凸轮面的压力而处于使进气阀、排气阀进行打开动作的姿势的情况下,凸轮轴的旋转速度(角速度)会临时降低,因而凸轮角传感器的检测时间(timing)有时会偏离准确的时间。结果,会担心导致决定开闭时期的反馈控制的精度降低。
4、由于凸轮轴经由正时链条或同步皮带与曲轴同步旋转,因此,例如,在指定气缸到达压缩上止点的时刻,作用于活塞的负荷会使凸轮轴的旋转速度(角速度)临时降低,基于与上述内容相同的理由,也能想象将导致决定开闭时期的反馈控制的精度降低。
5、基于上述理由,人们寻求一种即使凸轮轴的旋转速度临时发生变化,也将高精度地进行阀开闭时期的控制的阀正时控制装置。
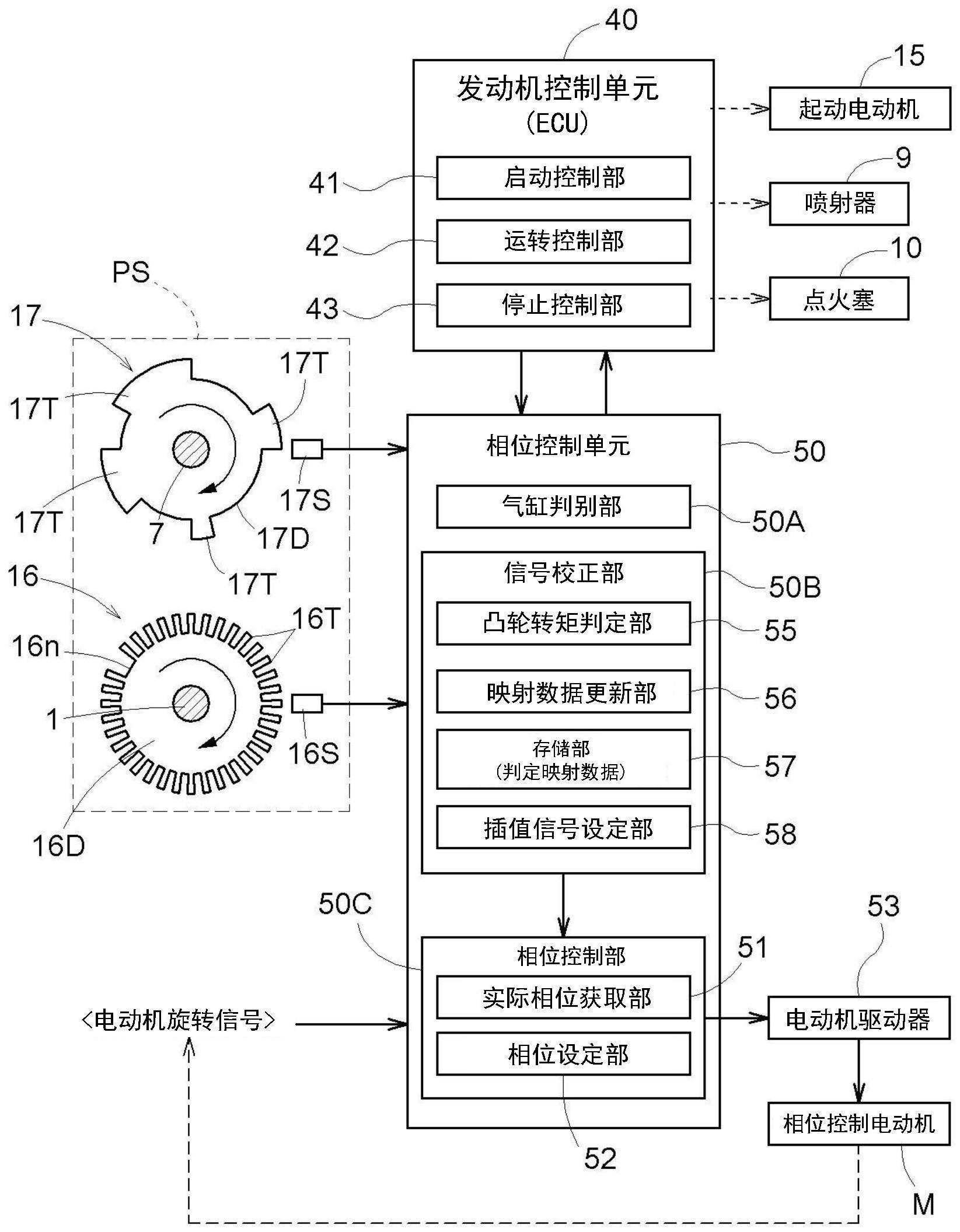
6、本发明涉及的阀正时控制装置的特征结构在于以下方面:具备驱动侧旋转体、从动侧旋转体、相位调节机构、相位感测部以及相位控制单元,上述驱动侧旋转体与内燃机的曲轴同步旋转,上述从动侧旋转体与上述内燃机的阀开闭用的凸轮轴一体旋转,上述相位调节机构通过电动机的驱动旋转来设定以旋转轴心为中心的上述驱动侧旋转体与上述从动侧旋转体之间的相对旋转相位,上述相位感测部获取上述相对旋转相位,上述相位控制单元基于上述相位感测部中的获取结果,为了设定上述相对旋转相位,控制上述电动机,并且,上述相位感测部具备曲轴转角传感器以及凸轮角传感器,上述曲轴转角传感器在上述曲轴旋转时检测相对于旋转基准的旋转角,上述凸轮角传感器在上述凸轮轴旋转一周时,在每个预先设定的多个旋转角处检测凸轮角信号,上述相位控制单元具备实际相位获取部、相位控制部以及信号校正部,上述实际相位获取部基于上述曲轴转角传感器检测的曲轴转角信号以及上述凸轮角传感器检测的上述凸轮角信号,获取上述相对旋转相位作为实际相位,上述相位控制部向减小从外部获取的目标相位与上述实际相位之间的偏差的方向控制上述电动机的旋转,上述信号校正部在上述凸轮角信号的检测时间由于偏离准确时间而被判定为不准确的情况下,设定被校准后的上述检测时间的插值信号来代替上述被判定为不准确的不准确信号。
7、根据该特征结构,在信号校正部判定凸轮角信号的检测时间不准确的情况下,设定被校准后的检测时间的插值信号来代替检测时间不准确的不准确信号,由此,可以基于通过插值信号被校准后的凸轮角信号以及曲轴转角信号,或者基于电动机的旋转速度的信号以及曲轴转角信号来获取正确的实际相位,从而可以提高相位控制的精度。
8、因此,可以形成即使有时凸轮轴的旋转速度临时发生变化,也将高精度地进行阀开闭时期相位的控制的阀正时控制装置。
9、作为附加于上述结构的结构,上述凸轮角传感器也可以具备旋转体以及传感器部,上述旋转体与上述凸轮轴一体旋转并且在外周具有设定数量的齿部,上述传感器部随着上述凸轮轴的旋转而检测上述齿部的旋转方向上的一侧的边缘,上述信号校正部也可存储在上述实际相位固定的状况下上述凸轮轴至少旋转一周时,上述凸轮角传感器所检测到的上述凸轮角信号的上述检测时间,并进行基于所存储的上述检测时间的、能够确定上述凸轮角信号中的上述不准确信号的确定处理。
10、根据上述结构,凸轮角传感器通过凸轮轴旋转一周而在传感器部检测到设定数量的凸轮角信号。信号校正部对凸轮轴在实际相位固定的状态下至少旋转一周时的凸轮角信号的检测时间进行存储,并且通过确定处理,可以基于被存储的检测时间的间隔来对检测时间偏离准确时间的不准确信号进行确定。
11、作为附加于上述结构的结构,上述相位调节机构也可以具有以下结构:通过使上述电动机的输出轴以与上述凸轮轴相等的速度向与上述凸轮轴的旋转方向相同的方向旋转来固定上述实际相位,并使上述电动机的上述输出轴的旋转速度与上述凸轮轴的旋转速度不同,由此调节上述实际相位,运转上述内燃机并以固定上述实际相位的方式驱动上述电动机,在上述凸轮轴至少旋转一周的时域内,上述信号校正部每单位时间对上述电动机的上述输出轴的旋转速度信号进行存储,并进行将所存储的上述检测时间的上述旋转速度信号中比较对象的旋转速度的差大于或小于指定值的旋转速度信号所对应的上述凸轮角信号确定为上述不准确信号的确定处理。
12、根据上述结构,在电动机的输出轴以与凸轮轴相等的速度旋转以使实际相位固定的状况下,信号校正部每单位时间对电动机的输出轴的旋转速度信号进行存储。由此,例如,随着凸轮轴的旋转速度的降低,凸轮角传感器所检测的凸轮角信号向延迟的方向变化,在这种情况下,被存储的输出轴的旋转速度也会降低。基于这样的理由,可以通过确定处理将与所存储的旋转速度中降低的旋转速度对应的凸轮角信号设定为不准确信号。
13、作为附加于上述结构的结构,上述信号校正部也可在上述内燃机运转的状况下,进行通过在固定了上述实际相位的时间随时执行上述确定处理,将存在上述不准确信号的区域设定为能够通过上述曲轴转角信号确定的ng区域的机器学习,并在上述机器学习之后,更新判定映射数据,上述判定映射数据由上述内燃机的气缸数、凸轮转矩决定,并且具有能够基于上述曲轴转角信号以及上述实际相位而确定ng区域的数据结构,也可以在上述相位控制部进行相位控制时,在判定通过上述曲轴转角信号以及上述实际相位确定的上述凸轮角信号的上述检测时间包含于上述ng区域的情况下,可以设定上述插值信号来代替包含于上述ng区域中的上述不准确信号。
14、根据上述结构,可以通过机器学习,更新将存在不准确信号的区域作为ng区域的判定映射信息。此外,当在判定映射信息被更新后控制相对旋转相位时,在基于曲轴转角信号以及实际相位而判定凸轮角传感器的检测时间包含于更新后的判定映射数据中的ng区域的情况下,可以设定准确的检测时间的插值信号来代替凸轮角信号(不准确信号)。
15、本发明涉及的阀正时控制装置的特征结构在于以下方面:具备驱动侧旋转体、从动侧旋转体、相位调节机构、相位感测部以及相位控制单元,上述驱动侧旋转体与内燃机的曲轴同步旋转,上述从动侧旋转体与上述内燃机的阀开闭用的凸轮轴一体旋转,上述相位调节机构通过电动机的驱动旋转来设定以旋转轴心为中心的上述驱动侧旋转体与上述从动侧旋转体之间的相对旋转相位,上述相位感测部获取上述相对旋转相位,上述相位控制单元基于上述相位感测部中的获取结果,为了设定上述相对旋转相位,控制上述电动机,并且,上述相位感测部具备曲轴转角传感器以及凸轮角传感器,上述曲轴转角传感器在上述曲轴旋转时检测相对于旋转基准的旋转角,上述凸轮角传感器在上述凸轮轴旋转一周时,在每个预先设定的多个旋转角处检测凸轮角信号,上述相位控制单元具备实际相位获取部、相位控制部以及信号校正部,上述实际相位获取部基于上述曲轴转角传感器所检测到的曲轴转角信号以及上述凸轮角传感器所检测到的上述凸轮角信号,获取上述相对旋转相位作为实际相位,上述相位控制部向减小从外部获取的目标相位与上述实际相位之间的偏差的方向控制上述电动机的旋转,上述信号校正部在上述凸轮角信号的检测时间由于偏离准确时间而被判定为不准确的情况下,向减小被判定为不准确的不准确信号和设为准确的准确信号的所述检测时间的差的方向改变上述不准确信号与上述准确信号的上述检测时间。
16、根据该特征结构,在信号校正部判定凸轮角信号的检测时间不准确的情况下,通过向减小检测时间不准确的不准确信号与检测时间准确的准确信号的检测时间的差的方向改变不准确信号和准确信号的检测时间,可以减小以准确的检测时间为基准的凸轮角信号的检测时间的偏离程度,减少实际相位的误差,从而可以提高相位控制的精度。
17、因此,可以形成即使有时凸轮轴的旋转速度临时发生变化,也将高精度地进行阀开闭时期(阀正时)的控制的阀正时控制装置。
18、本发明涉及的阀正时控制装置的特征结构在于以下方面:具备驱动侧旋转体、从动侧旋转体、相位调节机构、相位感测部以及相位控制单元,上述驱动侧旋转体与内燃机的曲轴同步旋转,上述从动侧旋转体与上述内燃机的阀开闭用的凸轮轴一体旋转,上述相位调节机构通过电动机的驱动旋转来设定以旋转轴心为中心的上述驱动侧旋转体与上述从动侧旋转体之间的相对旋转相位,上述相位感测部获取上述相对旋转相位,上述相位控制单元基于上述相位感测部中的获取结果,为了设定上述相对旋转相位,控制上述电动机,并且,上述相位感测部具备曲轴转角传感器以及凸轮角传感器,上述曲轴转角传感器在上述曲轴旋转时检测相对于旋转基准的旋转角,上述凸轮角传感器在上述凸轮轴旋转一周时,在每个预先设定的多个旋转角处检测凸轮角信号,在上述凸轮角信号的检测时间由于偏离准确时间而被判定为不准确的情况下,通知控制上述内燃机的发动机控制单元该凸轮角信号不准确,并根据该通知,在上述发动机控制单元中改变点火时间以及空气量计算方法。
19、根据该特征结构,在凸轮角信号的检测时间由于偏离准确时间而被判定为不准确的情况下,通知发动机控制单元该凸轮角信号不准确,并可以根据该通知,通过发动机控制单元的控制来改变点火时间以及空气量计算方法。
20、因此,可以形成在凸轮轴的旋转临时发生变化的情况下,能够相应地改变发动机的点火时间以及空气量计算方法的阀正时控制装置。
- 还没有人留言评论。精彩留言会获得点赞!