一种无偏航结构的漂浮式风电机组的倾角测量和复核方法与流程
本发明涉及漂浮式风电机组的,尤其是指一种无偏航结构的漂浮式风电机组的倾角测量和复核方法。
背景技术:
1、海上固定式风电机组,通过不同的基础形式,将钢结构打桩到海底,塔筒的倾斜和沉降可以通过设备实时监测,确保塔筒不发生倾斜。
2、海上漂浮式风电机组,跟固定式风电机组的区别是:风电机组安装到浮体上,浮体通过锚链连接到海床,依靠锚链的重力、锚链与海床之间的摩擦力、锚与海床之间的抓力,使漂浮式风电机组漂浮在某片小范围的海域。漂浮式风电机组在风浪流的联合作用下,发生多自由度的运动,浮体也面临被外部船只撞击出现漏水导致倾斜的风险,因此,漂浮式风电机组对倾角测量的准确性要求非常高,如果倾角测量错误,当出现真实大的倾角时,如果测量值偏小,未触发报警阈值,将会出现极大的运行安全风险。
3、当前漂浮式风电机组的倾角测量方法是:在塔筒厂制作完塔筒之后,在塔筒内壁指定位置焊接一个工装,当塔筒和机舱和叶片和浮体等设备全部在码头组装完毕之后,将倾角传感器安装到此工装上,选择小风和小浪的时机,给浮筒内注入海水调平,当三个浮筒外侧的吃水刻度一致时,此时认为塔筒处于垂直状态,然后读取倾角传感器的数据,如果此时读取的倾角传感器数值不为0,则在程序中给予修正到0度。
4、随后,将风电机组拖至指定海域,风电机组运行时,即以此倾角传感器的数值为参考,当倾角超出设定的阈值时,发出报警信号。
5、上述方法存在以下问题:
6、1、三个浮筒在注水调平的过程中,由于波浪的存在,浮体吃水位置并不恒定,而是处于波动中,很难读取到准确稳定的吃水数值;另外,由于三个浮筒的吃水刻度是由三组不同人员读取和记录,读取视角和读取方法存在一定区别,必然影响到调平效果;三个浮筒距离塔筒很远,浮筒与塔筒通过平台连接,很难确保三个方向的平台和浮筒在加工和安装过程中的一致性,即三个浮筒的同一数值的刻度线可能并不完全在一个平面上,虽然将三个浮筒的吃水调成一致,但塔筒并不是垂直的。
7、2、倾角传感器随着时间的推移,可能出现零飘或误差现象,准确性逐渐下降,因此,单纯依靠倾角传感器进行倾角测量的话,准确性难以保证,并且传感器一旦出现故障,不能复核真实倾角。
8、3、当倾角传感器出现故障需要更换,恰好浮筒内的水量也发生变化时,更换后的倾角传感器将缺少参考,因为,处于大海中的漂浮式风电机组,由于浮筒下面有系泊的作用力,比在码头安装调试时更难调平。
9、4、针对有偏航结构的漂浮式风电机组,可以通过将机舱偏航一圈的方式,塔筒倾角将呈现正弦波的变化,正弦波的均值可以作为倾角传感器的修正值,但是,针对无偏航结构的漂浮式风电机组,此方法并不适应。
10、5、安装倾角传感器的工装直接焊接到塔筒内壁上,传感器测量的是内壁的倾角,并不能代表塔筒的倾角,因为塔筒形状是锥形,上面小下面大,因此,塔筒内壁是倾斜的,并不是垂直的。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提出了一种准确可靠的无偏航结构的漂浮式风电机组的倾角测量和复核方法。
2、为实现上述目的,本发明所提供的技术方案为:一种无偏航结构的漂浮式风电机组的倾角测量和复核方法,基于以下特点:
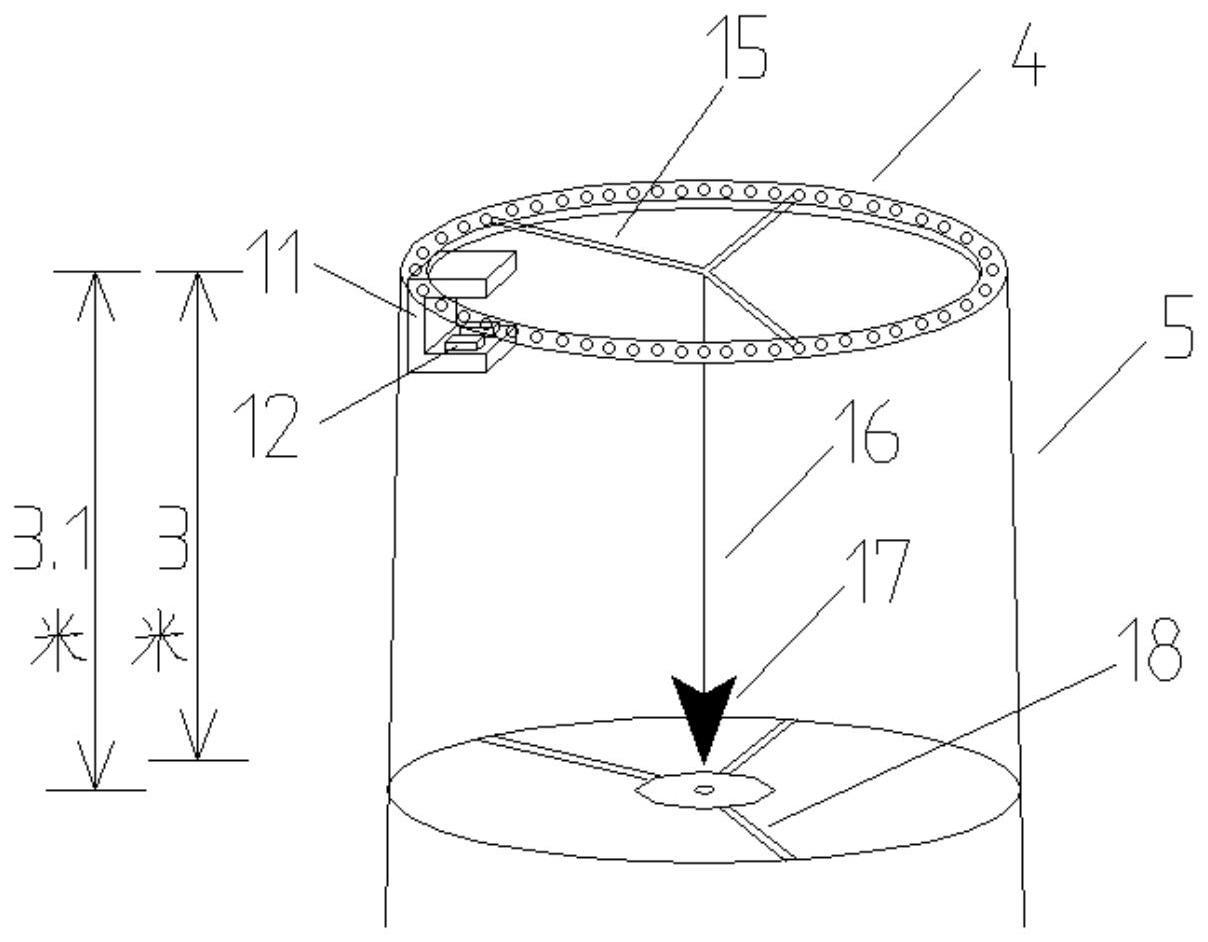
3、风电机组的塔筒由多节塔筒段通过法兰依次连接而成,塔筒与基础之间通过法兰连接,两两法兰之间通过螺栓紧固,法兰端面的平整度高,如果法兰端面各个方向为水平状态,则表示塔筒垂直;如果法兰端面任意方向出现非水平状态,则表示塔筒出现了倾斜;利用这一特点,在制作基础的时候,将基础立起来,用水平尺测量基础的法兰端面的前后方向和左右方向,当测量到前后方向和左右方向都为零时,表示基础是垂直的;
4、将基础保持垂直状态,制作一个u型件,u型件的两个角为直角,将u型件侧放,即u型件的两个竖边上下平行,其开口朝向基础内部,将侧放的u型件顶部紧贴到基础顶部的法兰前后方向的下端面,保持紧贴状态,然后将u型件焊接到基础内壁,此时,u型件的安装面与法兰面完全平行,在u型件的安装面上,安装两个相同的双轴倾角传感器,双轴倾角传感器的x轴与基础的前后方向平行,双轴倾角传感器的y轴与基础的左右方向平行,两个双轴倾角传感器接入采集器,此时的双轴倾角传感器前后和左右倾角应该都为零,如果不为零,则对双轴倾角传感器进行对零修正,将倾角修正到零,此时,双轴倾角传感器的倾角数值将完全代表法兰面的倾角,然后拆除两个双轴倾角传感器和采集器;
5、漂浮式风电机组在码头组装的时候,选择小风和小浪天气,组装完毕后,将之前的两个双轴倾角传感器重新安装到u型件处,并接入采集器;浮筒注水调平时,此时的倾角数据作为塔筒是否垂直的参考,如果x轴和y轴的倾角都为零,表示塔筒垂直,如果x轴和y轴的倾角有任意一个不为零,表示浮筒未调平,塔筒不垂直,需继续调节水量直到x轴和y轴的倾角都为零;
6、接着,在基础的法兰面高度安装一个悬挂支架,悬挂支架的中心为基础截面的中心,在悬挂支架中心位置悬挂一根钢丝,钢丝下端连接一个吊坠,钢丝与吊坠共长为n,在距离悬挂支架下方m处安装一个参考支架,m>n,参考支架的中心为基础截面的中心,此时,吊坠刚好对准参考支架的中心;
7、最后,将漂浮式风电机组拖航至指定海域,将锚链下放到海底,该漂浮式风电机组只有一个浮筒的底部用锚链连接,风电机组将在风力作用下正常运行,当风向发生变化时,风电机组将以锚链连接的那个浮筒为中心,随着风向转动;
8、漂浮式风电机组在正常运行时,将使用两个双轴倾角传感器的倾角作为参考;
9、当两个双轴倾角传感器的倾角偏差小于0.1度时,表明两个双轴倾角传感器正常,当两个双轴倾角传感器的x轴倾角都超过设定的安全阈值时,或当两个双轴倾角传感器的y轴倾角都超过设定的安全阈值时,发出报警信号,提示塔筒倾角过大,有安全风险,可能是风浪过大导致,或者锚链出现了异常;
10、当两个双轴倾角传感器的x轴倾角或y轴倾角偏差超过0.1度时,表明其中一个双轴倾角传感器出现了异常,将发出报警信号,提示有一个双轴倾角传感器异常,需要复核,复核方法如下:在小风小浪状态下,测量吊坠在参考支架上的投影点与中心点的距离l,通过公式φ=arcsin(l/n),即可计算出塔筒的真实倾斜角度φ,如果某个双轴倾角传感器的数值更远离该真实倾斜角度φ,由此能够判断是这个双轴倾角传感器异常。
11、进一步,设置定期自动巡检程序,方法如下:在小风小浪状态下,判断两个双轴倾角传感器的数值是否都小于0.1度,如果是,则不做报警处理,如果不是,则发出报警信号,表明塔筒出现了倾斜,可能是浮筒内的水量发生了变化,需要复核水量并重新调平。
12、进一步,所述无偏航结构的漂浮式风电机组包括三叉星形平台、三个浮筒、锚链、基础、塔筒和带叶片的主机;所述主机与塔筒之间固定连接,无偏航系统;所述塔筒通过法兰安装在基础上,基础安装到三叉星形平台的三个臂交汇处,所述三叉星形平台的每个臂末端安装有一个浮筒,其中一个浮筒的底部用锚链连接,锚链的下端连接到海床。
13、本发明与现有技术相比,具有如下优点与有益效果:
14、1、安装双轴倾角传感器的u型件,与塔筒法兰面完全平行,双轴倾角传感器的数值能体现塔筒的倾斜状态,无需其它修正。
15、2、当两个双轴倾角传感器的倾角出现偏差,无法判断哪个异常时,有机械式的稳定的参照物作为参考。
- 还没有人留言评论。精彩留言会获得点赞!