可控制转速和主回路通断的中小型风力机多用控制器的制作方法
本发明属于风能利用,涉及中小型风力发电机控制技术,具体涉及一种既适用于垂直轴也适用于水平轴机的中小型风力机多用控制电路。
背景技术:
1、现有的中小型风力发电机离网型应用,负载都要接在逆变器输出端,发电机送出的能量要经过控制器、逆变器的一定损耗再向负载提供能量,还要用蓄电池的电。按电学原理是可以直接把风力发电机的不稳定交流电直接连接到阻性发热元件供给电能的,是可以不经过逆变器也不需要蓄电池的,但对于这种供暖应用,现在市面上的控制器的技术结构使得这种无损耗供电的需求不能被满足。
2、现有的中小型风力发电机控制器,分为离网型、并网型两种。离网型控制器的直接负载是蓄电池和离网逆变器。并网型控制器的负载是并网逆变器,并网逆变器接到电网。这两种负载都是有源负载,都自然具备一定的门槛电压。离网系统的门槛电压就是蓄电池电压;并网系统的门槛电压是由逆变器设定的逆变器最低工作电压(逆变器必须有一个最低输入电压)。这种由有源负载自然具备的门槛电压有利于风力机的起动,尤其是有利于风速较低情况下的风轮起动、加速。这是因为,风力机刚起动时电压较低,未达到门槛电压时主回路不通(没有电流流过控制器),发电机没有电流,电磁阻力很低,自然满足了风力机低阻力起动的要求。这种功能不是控制器决定的,而是有源负载决定的。这也使得现有控制器在现有的这种定型模式下不需大的改进。现有的风力机控制器都是结合上述有源负载来设计定型的。这种定型模式一直稳定应用至今而未见多用途、无损耗的创新产品。这是第一点,也是基本的一点。
3、第二,现有的中小型风力发电机控制器都是只有一个风机输入端,没有两个、多个风机输入端的,不能适应新开发出来的一轴多机模式的风力发电机的需要。如已授权的实用新型专利技术——“轴柱结构一轴多机气动减速单臂升阻结合垂直轴风力机”(专利号:2018203919863,待审发明申请号:2018102384998),采用一个风轮带动两台(或多台)发电机的新结构,具有便于控制转速、便于维修、降低造价、便于安装电磁制动器的优点。但至今没有相适应相配套的控制器可用,市售现有中小型机控制器都不能使用,因此有碍推广。
4、第三,现有的中小型风力发电机控制器没有可以直接接无源工作负载的,如直接接阻性负载。由于不是有源负载,就没有了门槛电压,就失去了让风轮顺利起动的有利条件。换句话说,如果现有的离网型控制器不接蓄电池而直接接阻性的无源负载,会阻碍风轮的起动、加速,不符合风力机运行要求,这就需要有一种新型的控制器来满足新的需求。
5、第四,现有的小型风力机控制器没有提供令电动机正反转的控制功能。而随着中小型机的改进、进步完善,需要对风轮增加气动减速功能,需要控制器提供令执行机构产生动作的控制功能,如令电动机正反转的控制功能(如上述2018203919863号专利,和申请号为202210781282.8、2022217006465.5的名为《伸缩扰流板改变叶片的升力的气动减速方法》的专利技术)。
6、第五,现有的小型风力机控制器没有提供制动器的制动控制功能,致使带有电磁制动器(如2018203919863号专利)的风力机机构找不到所需的控制器。
7、第六,现有的中小型风力机控制器都带有整流滤波电路,将三相发电机发出的三相交流电整流成直流并滤波成为平滑直流,再提供给并网逆变器或离网逆变器、同时给蓄电池充电,已经形成一种普遍的、定型的技术体制(模式),这种模式,有整流器件发热损耗。按现有模式,要把电能供给阻性的供暖发热元件,只有一种选择,就是把发热元件接逆变器输出端,而不能接在发电机输出端(即控制器输入端),也不能接在控制器输出端,这样都将阻碍风轮起动。这是现有中小型风力发电机应用的固有技术体制决定的。控制器整流加上逆变器的大功率变流器件,有两部分器件发热损耗,这样对于供暖应用是不经济的。
技术实现思路
1、要解决的技术问题本发明目的在于提供一种新的控制器,带无源负载也能让风轮顺利起动加速。在这一条基本要求基础上,增加新功能——对任何电动机驱动机构提供动作信号(如气动减速所需正反转动作的执行驱动信号);提供制动器动作的执行信号,提供备用电阻接入及断开的执行信号;可以离网使用,也可以并网使用;还可以夏季并网售电、冬季离网供暖。可以灵活选配不同的负载,不论是有源负载还是无源负载都可以外接。
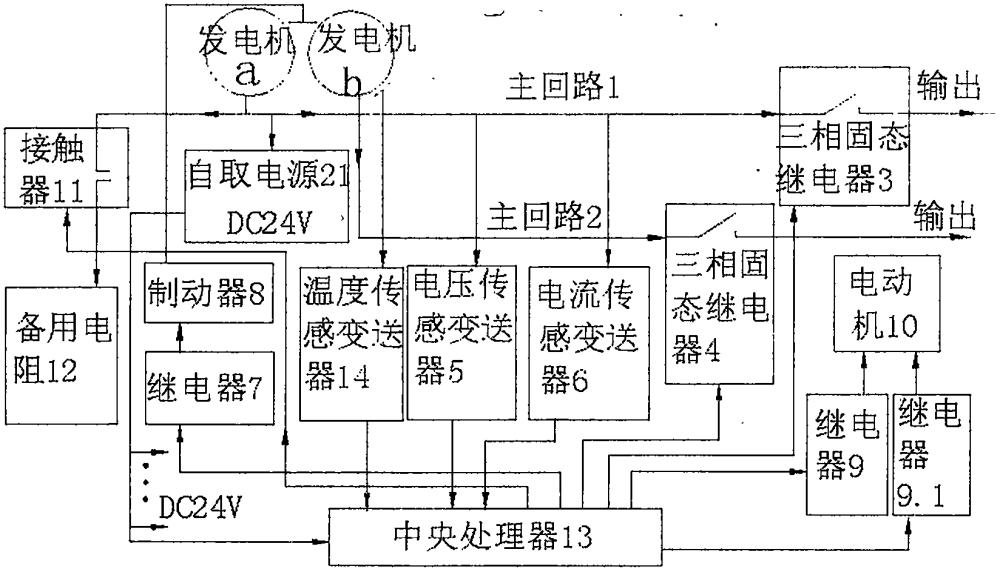
2、为实现上述目的,本发明采用如下技术方案:一种可控制转速和主回路通断的中小型风力机多用控制器,发电机a、b的两个主回路可受控通断,由主回路1、主回路2,中央处理器13,三相固态继电器3和三相固态继电器4,电压传感变送器5,电流传感变送器6组成双路型基本控制电路。
3、一种可控制转速和主回路通断的中小型风力机多用控制器,其特征在于,在分别接发电机a、b的主回路1、主回路2中分别串联接入三相固态继电器3、三相固态继电器4;三相固态继电器3、4的控制端接中央处理器13,固态继电器触点受中央处理器13控制;中央处理器13接受电压传感变送器5送来的电压信号u和电流传感变送器6送来的电流信号i,还接受温度传感变送器14送来的温度信号t。
4、所述的可控制转速和主回路通断的中小型风力机多用控制器,中央处理器13连接继电器9、继电器9.1,控制电动机10的正、反转;中央处理器13连接继电器7、通过继电器7控制制动器8的动作;中央处理器13连接接触器11,控制备用电阻12的接通、断开。
5、所述的可控制转速和主回路通断的中小型风力机多用控制器,采用自取电方式,自取电源21从回路1取电能,输出稳定的dc24v,给包括中央处理器13在内的所有电路元器件供电。
6、所述的可控制转速和主回路通断的中小型风力机多用控制器,去掉主回路2和三相固态继电器4,即成为单路型基本控制电路,可用于单发电机的风力发电机。
7、所述的可控制转速和主回路通断的中小型风力机多用控制器,不论双路型、单路型基本控制电路,都可以外接阻性负载15(无源负载)和整流滤波充电电路23、并网逆变器19(有源负载)。
8、有益效果 首先,2个主回路可以受控通断,即串在主回路中的固态继电器3、4能受中央处理器13的控制使主回路通断。接无源负载15的情况下:中央处理器13接受电压变送器5送来的电压信号,风力机起动时电压信号不达到一定电压就不接通主回路,不带载,加速后达到一定转速、建立起一定的空气动力、电压达到设定值时,中央处理器13对三相固态继电器3发接通信号,三相固态继电器3触点接通,主回路1导通,这时主回路1有电流流向负载。这时是1台发电机工作。带载后如果风力增加,当中央处理器13测到回路1的功率达到发电机a的额定功率(发电机a的额定交流功率等于即的额定电压乘额定电流)时,再给三相固态继电器4控制端发导通电压信号,令其触点接通,发电机b的主回路2接通,2台发电机同时工作。当中央处理器13测到发电机b的输出功率下降,又可以断开一路,只让一台发电机出力。如此周而复始测试、控制。这样,两个主回路的输出功率总是与风力保持动态平衡,不至于让风力拖不动负荷而减速、停转。
9、第二,主回路输出接有源负载时,如图3接并网逆变器19、图4接离网逆变器20和蓄电池22情况下,主回路的受控通断也能保证风轮顺利起动、加速,因为对中央处理器13主回路接通断开所设定的电压值可以比有源负载的门槛电压值稍高,既能保证风轮顺利起动、加速,又能保证有源负载正常工作。所述的可直接带阻性负载的中小型风力机多用控制器,其输出端可以接有源、无源各种性质的负载,各种负载都可以外配。
10、第三,风力增大到2台发电机都超额定值时的控制:中央处理器13测到电压电流信号,超过设定的功率值,就输出开关信号到继电器9,令电动机10正转(这里电动机10的动作意味着气动减速装置动作,降低风能获取率、让风轮减速);当中央处理器13又测到输出功率小于设定值时,输出开关信号到继电器9.1,令电动机10反转(电动机10的反转即让气动减速装置回位,恢复风能获取率、让风轮恢复原转速)。如此反复进行,保持风轮转速、出力与风力的动态平衡。
11、第四,当遇到特大暴风,需要保护停机时,就要投入制动器8,在制动器8动作前,先令接触器11得电吸合,切入备用电阻12,让风轮先减速,再制动,以减少冲击力、确保结构机件安全。当温度传感变送器14测到发电机温度过高,中央处理器13也将发信号先令接触器11得电吸合,切入备用电阻12,然后令继电器7吸合令制动器得电制动。
12、第五,本发明采用自取电方案,不受有无市电的限制,无需采用光伏、蓄电池和充电控制器甚至还加上电池管理系统这套复杂昂贵的电源系统,免除对严寒情况下电池亏电、多日阴雨或无风而导致不能充电等情况的担心。减少管理成本。采用自取电源21,无风时控制电路无电是可以允许的,风轮处在待机状态,这时也不需要电;当风小、或风轮刚起动时,电压低,自取电源21仍不工作,而这时整个系统无需任何动作,主回路的固态继电器3、4也不需要接通,中央处理器13也不需要进入工作状态;当风力达到一定程度,风轮转速也会达到一定程度,发电机电压(主回路电压)也会随之达到一定值,这时才需要有控制器参与控制,而这时自取电源21的输入电压已足够高,就会自动进入工作状态,自取电源21即可自动满足控制电路的供电需要。总之,无风或风不大时自取电源处于休眠状态,风力和转速、电压达到一定值自动激活自取电源,这种自取电模式符合电路需要。
13、第六,本发明由于采取了将阻性负载直接接受发电机交流电能,而非接在整流滤波电路之后而使阻性负载接受直流电能,因而避免了直流电通、断电时的大电弧问题,安全度高,也可提高元器件寿命和工作可靠性。
14、为说明有益效果,特做下列分析和证明:
15、以可控制转速和主回路通断的中小型风力机多用控制器的双路型原理电路图来说明。见图11——多用风力机控制器的双路型原理电路图:1)固态继电器控制主回路通断。对于双发电机的风力发电机,回路1接到发电机fa,回路2接到发电机fb。发电机fa、fb输出的是三相交流电。回路1中串联固态继电器gt1,回路2中串联固态继电器gt2,三相固态继电器内有3个常开触点,分别接在主回路的a、b、c三相线中。
16、2)三相固态继电器有控制端口,控制三个触点同时通断。由中央处理器13给出主回路通断指令,分别给到固态继电器gt1、gt2的控制端口。2个固态继电器占用中央处理器2个输出端。固态继电器的控制端口只需加上3~32vdc电平信号即可令触点接通,撤去该直流电平信号即可恢复常开触点断开。控制电平范围宽,是很容易实现的、并不苛刻的控制条件。
17、3)中央处理器13控制电动机m正反转。中央处理器13接继电器fzz(图中中文标记为继电器9),当中央处理器发正转指令时,令fzz得电,使电动机m(中文标记为电动机10)左边为+,正转,正转到头碰断行程开关xc1,正转停止;当中央处理器发反转指令时,令继电器ffz(中文标记为继电器9.1)得电,使电动机m右边为+,反转,反转到头碰断行程开关xc2,反转停止。ffz、fzz这两个继电器是互锁关系,不同时得电,不同时工作。电动机m只有三个状态:停止不动,正转,反转。正反转占用中央处理器2个输出端。
18、4)中央处理器的第5个输出是控制制动器。当中央处理器发出制动指令,jzd(中文标记为继电器7)得电,令接继电器7的触点吸合,制动器zd1、zd2(中文标记为制动器8)同时得电刹车。
19、5)中央处理器的第6个输出是控制r(中文标记为备用电阻12)的切入、切出。当中央处理器发出切入指令,接触器jc(中文标记为接触器11)的线圈得电,令jc(接触器11)的触点吸合,将r(备用电阻12)切入。发切出指令时,jc(接触器11)失电,则jc的触点断开,r切出,这时风轮恢复正常带载。或当自取电源dy(中文标记为自取电源21)失电时,接触器jc也失电,也使jc的触点断开,r切出,这时风轮回到待机状态。
20、自取电源dy由整流电路zl1、滤波电容c、dc-dc(直流变换模块)组成,输出24v直流。
21、6)中央处理器的输入是:温度信号t(中文标记为温度传感变送器14),向中央处理器13传送发电机的温度信号;电压变送器u(中文标记为电压传感变送器5)向中央处理器传送电压信号,其中in是其电压输入端,vcc是工作电源+端,gnd是工作电源-端,out是其信号输出端,分+-端。电流变送器i(中文标记为电流传感变送器6)向中央处理器传送电流信号,vcc、gnd、out端定义与u的相同。
22、令电动机执行正反转、令备用电阻r切入、令制动器制动的设定值都可以在中央处理器中预先设定。温度t的上限值也可预先设定,高于上限值,就令制动器动作。
- 还没有人留言评论。精彩留言会获得点赞!