一种识别风力发电机组变桨控制需求失效的方法及系统与流程
本发明属于风力发电机变桨控制,具体涉及一种识别风力发电机组变桨控制需求失效的方法及系统。
背景技术:
1、水平轴风力发电机的风轮吸收风能旋转,进而带动连接的发电机旋转发电。根据风速大小的不同,风力发电机组的控制目标不同。在额定风速以上,控制目标为通过变桨控制使机组的转速控制在额定转速附近,从而使机组输出功率在额定功率附近,保证风力发电机组的机械及电气部件在设计范围内可以正常运行。
2、传统的发电机转速-变桨控制环控制输入为实际检测的发电机转速与发电机转速设定值之差,通过pi或pid控制给出对应的变桨角度,变桨角度的大小可以限制或吸收风能来控制发电机转速。传统的发电机转速-变桨控制环虽然是闭环控制,但变桨控制指令给出到变桨执行机构执行再到整个风轮由于变桨作用限制吸收或释放风能从而控制发电机转速,由于风力发电机组风轮是一个庞大的惯性部件,从变桨控制指令到实际发电机转速控制目标达成需要一定时间才能达到,因此存在变桨需求指令与发电机转速不匹配的问题,比如需要较大桨距角时来调节较大转速波动但给出的变桨控制指令小不足以调节较大转速波动,如此时仍不进行干预,发电机转速控制目标无法达成。
技术实现思路
1、本发明的目的在于提供一种识别风力发电机组变桨控制需求失效的方法,发现现有技术中无法对变桨需求指令与发电机转速匹配性分析的问题,从而更有针对性的解决无法识别风力发电机组变桨控制需求失效的问题。
2、本发明是通过以下技术方案来实现:
3、一种识别风力发电机组变桨控制需求失效的方法,具体包括以下步骤:
4、s1.获取第一输入参数和第二输入参数;
5、将第二输入参数预处理得到比较阈值;
6、若第一输入参数小于等于比较阈值,控制流程结束;
7、若第一输入参数大于比较阈值,启动s2;
8、s2.获取小桨距角过速转速桨距角阈值,及叶片变桨需求指令;
9、根据叶片变桨需求指令得到当前变桨需求平均角度;
10、若小桨距角过速转速桨距角阈值大于当前变桨需求平均角度,则开始进行时间累计,得到时间累计值;
11、s3.获取小桨距角过速转速时间保持阈值;
12、判断时间累计值是否大于小桨距角过速转速时间保持阈值;
13、如果时间累计值小于等于小桨距角过速转速时间保持阈值,则控制流程终止;
14、如果时间累计值大于小桨距角过速转速时间保持阈值,说明风力发电机组变桨控制需求失效,则变桨系统执行保护操作。
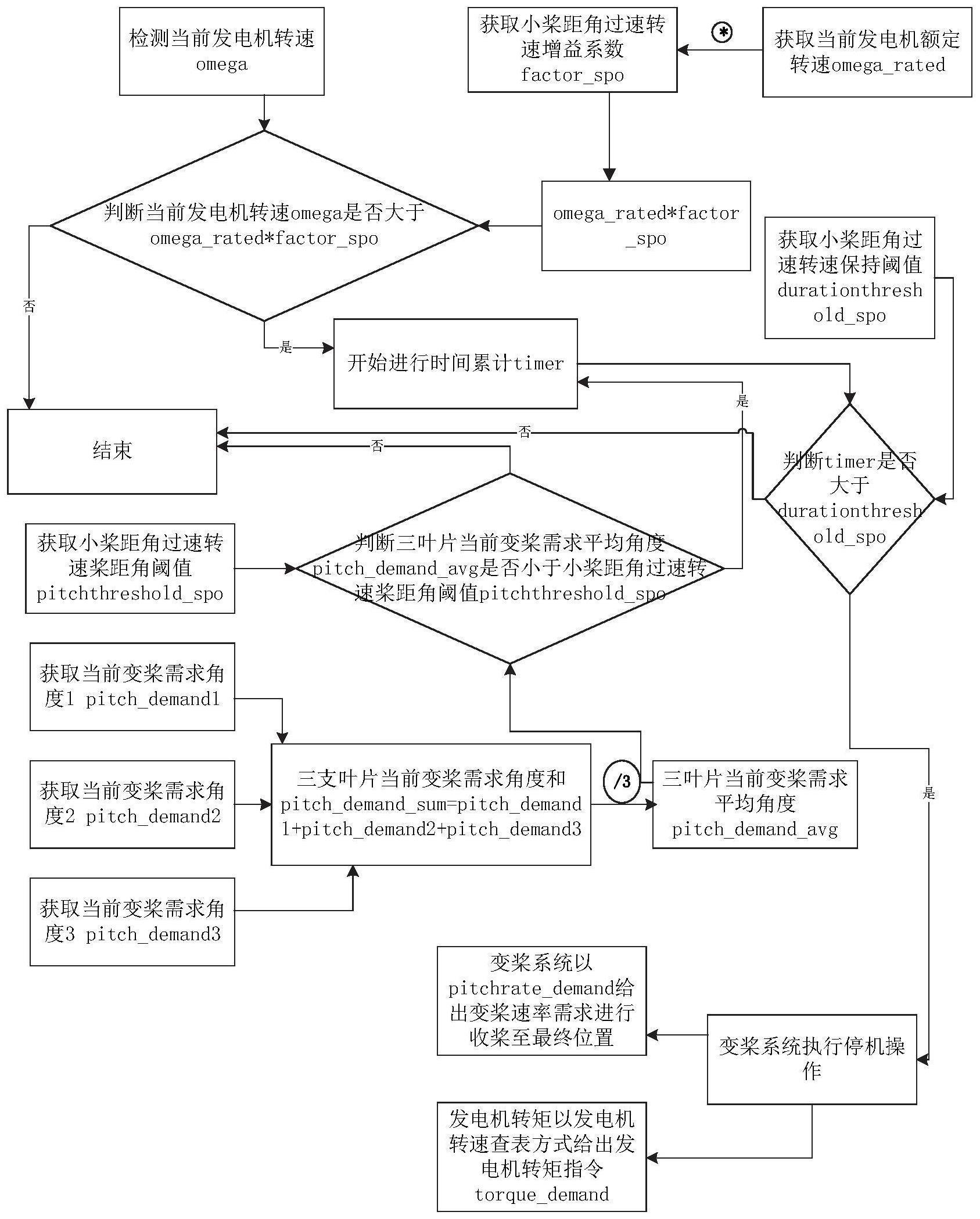
15、进一步,当获取的第一输入参数为发电机转速时,第二输入参数为当前发电机额定转速;
16、s1具体为:
17、1.1.获取当前发电机转速,获取当前发电机额定转速;
18、1.2将当前发电机额定转速与小桨距角过速转速增益系数相乘得到小桨距角过速转速判断值omega_rated*factor_spo;
19、1.3.判断当前发电机转速是否大于小桨距角过速转速判断值omega_rated*factor_spo;
20、如当前发电机转速小于等于小桨距角过速转速判断值omega_rated*factor_spo,则控制流程结束;
21、如当前发电机转速大于小桨距角过速转速判断值omega_rated*factor_spo,开始进行时间累计,得到时间累计值。
22、进一步,当获取的叶片变桨需求指令为三支叶片变桨需求指令时,s2中,将三支叶片的当前变桨需求角度进行平均,得到三支叶片当前变桨需求平均角度;
23、判断三支叶片当前变桨需求平均角度是否小于小桨距角过速转速桨距角阈值;
24、如果小桨距角过速转速桨距角阈值小于等于三支叶片当前变桨需求平均角度,则控制流程终止;
25、如果小桨距角过速转速桨距角阈值大于三支叶片当前变桨需求平均角度,开始进行时间累计,得到时间累计值。
26、进一步,将三支叶片的当前变桨需求角度进行平均,得到三支叶片当前变桨需求平均角度,具体过程为:
27、将三支叶片当前变桨需求角度求和,表达式为:
28、pitch_demand_sum=pitch_demand1+pitch_demand2+pitch_demand3;
29、其中,1pitch_demand1为第一支叶片的当前变桨需求角度;pitch_demand2为第二支叶片的当前变桨需求角度;3pitch_demand3为第三支叶片的当前变桨需求角度;
30、将pitch_demand_sum除以3得到三叶片当前变桨需求平均角度pitch_demand_avg。
31、进一步,当获取的叶片变桨需求指令为单支叶片变桨需求指令时,s2中,判断某支叶片当前变桨需求角度是否小于小桨距角过速转速桨距角阈值;
32、如果小桨距角过速转速桨距角阈值小于等于某支叶片当前变桨需求平均角度,则控制流程终止;
33、如果小桨距角过速转速桨距角阈值大于某支叶片当前变桨需求平均角度,则开始进行时间累计,得到时间累计值。
34、进一步,s3中,变桨系统执行保护操作的形式采用停机方式、限功率方式或限转速方式。
35、进一步,变桨系统执行停机操作采用停机方式时,具体为:
36、变桨系统以变桨速率需求进行收桨至最终位置,发电机转矩以发电机转速查表方式给出发电机转矩指令。
37、进一步,变桨系统执行停机操作采用限功率方式时,具体为:将功率设定点设置为额定功率的50%-80%,变桨控制回路及转矩控制回路按照此功率设定值进行限功率运行。
38、进一步,变桨系统执行停机操作采用限转速方式时,具体为:将转速设定点设置为额定转速的70%-90%,变桨控制回路按照此转速设定值进行限转速运行。
39、一种识别风力发电机组变桨控制需求失效的系统,具体包括:
40、获取模块,用于获取第一输入参数、第二输入参数、小桨距角过速转速时间保持阈值及叶片变桨需求指令;
41、预处理模块,用于将第二输入参数预处理得到比较阈值;
42、第一比较模块,用于将第一输入参数和比较阈值进行比较;
43、若第一输入参数小于等于比较阈值,则控制流程结束;
44、若第一输入参数大于比较阈值,则启动第二比较模块;
45、计算模块,用于根据叶片变桨需求指令得到当前变桨需求平均角度;
46、第二比较模块,用于判断小桨距角过速转速桨距角阈值与当前变桨需求平均角度的大小;
47、若小桨距角过速转速桨距角阈值大于当前变桨需求平均角度,则启动时间累计模块;
48、时间累计模块,用于进行时间累计,得到时间累计值;
49、第三比较模块,用于判断时间累计值是否大于小桨距角过速转速时间保持阈值;
50、如果时间累计值小于等于小桨距角过速转速时间保持阈值,则控制流程终止;
51、如果时间累计值大于小桨距角过速转速时间保持阈值,说明风力发电机组变桨控制需求失效,则变桨系统执行保护操作。
52、与现有技术相比,本发明具有以下有益的技术效果:
53、本发明公开了一种识别风力发电机组变桨控制需求失效的方法,通过对第二输入参数的处理得到比较阈值,若第一输入参数大于比较阈值,则开始判断小桨距角过速转速桨距角阈值与当前变桨需求平均角度的大小,若小桨距角过速转速桨距角阈值大于当前变桨需求平均角度,则开始进行时间累计,得到时间累计值;采用累计时间计时的方式来判断风力发电机组变桨控制需求失效是否是瞬时状态还是长时状态,如判断其为非瞬时状态,说明变桨控制需求失效,则进行保护操作,保障机组正常安全运行。
54、采用变桨需求控制指令作为识别风力发电机组变桨控制需求是否失效的条件输入,无需新增检测硬件;当识别出变桨控制需求失效时,立即进行停机保护,防止由于错误的变桨控制需求导致的控制目标失败。
55、进一步,若发电机转速持续上升,此刻变桨控制指令如还是较小使转速持续上升会导致超速飞车等严重后果,因此本发明以发电机转速作为识别风力发电机组变桨控制需求是否失效的条件输入,当发电机转速超过比较阈值则开始进行时间累计,当累计时间大于小桨距角过速转速时间保持阈值,则判断失效需即时进行停机保护。
- 还没有人留言评论。精彩留言会获得点赞!