一种基于辨识信息的航空发动机稳态燃油自抗扰控制方法
本发明属于航空发动机控制领域,涉及航空发动机转速模型辨识算法的设计,特别涉及一种基于辨识信息的航空发动机稳态燃油自抗扰控制器设计。
背景技术:
1、现代飞行器正朝着高空、高速、高机动性等方向不断发展,这对飞行动力系统的安全性和可靠性提出了越来越高的要求。其中,航空发动机作为关键部件,其安全稳定的工作离不开可靠的燃油控制系统。航空发动机燃油控制系统是由机械、液压、电子和电气等部件组成的复杂系统。由于航空发动机的飞行环境复杂多变,同时存在零部件磨损、极端飞行天气、自身系统参数变化等情况,航空发动机燃油控制系统需要具备强鲁棒性。然而,航空发动机具有非线性和强耦合特性,这使得设计具有强鲁棒性的航空发动机控制系统非常复杂。目前,自抗扰控制(active disturbance rejection control,adrc)技术由于其对模型的依赖程度低以及动态补偿干扰等优点,正在被探索应用于解决发动机控制问题。
2、adrc的核心思想是将模型的不确定动态以及外部扰动作为总扰动,然后利用扩张状态观测器实时估计总扰动,进而将总扰动的估计值设计为前馈项实时补偿总扰动。adrc最初是非线性形式的,需调节参数多、输出抖动、稳定性不易保证等问题限制了adrc在工程中的应用。gao z q在2003年提出了一种更简单、易于实现的线性自抗扰控制器(linearactive disturbance rejection controller,ladrc),将adrc的调参问题简化为观测器带宽与控制器带宽的调参问题。近些年来,越来越多的研究者开始将ladrc应用于航空发动机控制。
3、需要指出的是,ladrc的优异性能离不开合适的控制器参数。在ladrc中,参数b0决定了前馈补偿系数,进而影响对总扰动的补偿性能。针对参数b0,chen xing等提出了一种改进的ladrc参数整定方法,在假设调节时间已知的情况下,可以通过单调增大b0来整定b0。然而,该方法只能确保在某一范围内试凑出合适的b0。对于航空发动机控制系统来说,试凑法的不确定性比较大,时间成本较高,且参数整定麻烦。另一个整定参数b0的思路为:辨识系统的控制系数,进而依据辨识结果整定b0。航空发动机的物理结构复杂,建模困难,在设计航空发动机稳态燃油控制算法时,被控对象的动态以及控制系数b通常是未知的。由于b0整定为接近b时ladrc的总扰动补偿效果较为优异,因此,如何在被控对象动态未知的情况下准确辨识b是依据辨识方法整定参数b0的关键。
4、另一方面,ladrc将航空发动机中的未知高频动态归为总扰动,并使用扩张状态观测器(extend state observer,eso)估计。为了保证对未知高频动态的准确估计,需要eso具有较高的带宽,因此eso的增益较高。然而,较高的eso增益会放大测量噪声的影响,从而导致观测误差较大且观测器输出抖动。如何改进eso以实现使用低增益的eso即可准确估计航空发动机未知动态,是设计航空发动机稳态燃油自抗扰控制器的一个难点。
5、综上所述,为了解决上述参数b0的整定问题与低增益eso的设计问题,本发明提出了一种同时辨识控制系数与发动机未知动态的方法以及一种新的观测器结构设计。
技术实现思路
1、针对以上问题,本发明首先基于cgs算法提出了一种同时辨识控制系数与发动机未知动态的方法。基于控制系数的辨识结果,快速整定参数b0。进一步地,通过将未知动态的辨识结果引入eso构建改进的扩张状态观测器(improved extend state observer,ieso)。由于未知动态的辨识结果中包含未知高频动态的信息,因此低观测器增益即可实现对总扰动的准确估计。最后,本发明证明了航空发动机转速对参考转速的跟踪性能。
2、为了达到上述目的,本发明采用的技术方案为:
3、一种基于辨识信息的航空发动机稳态燃油自抗扰控制方法,包括以下步骤:
4、步骤1:转速模型辨识
5、本发明考虑已知航空发动机转速动态的阶数为二阶而其他动态未知,因此将航空发动机转速的模型建立为:
6、
7、其中,n2代表高压转子转速,代表高压转子转速的导数,u代表燃油流量,w代表扰动,b为未知的控制系数,f(x1,x2,w)是未知的发动机转速动态。具体地,首先对转速控制系统给定转速信号,然后控制器通过计算给定转速与转速的差值做出控制指令,最后使得系统的转速跟踪到给定转速。
8、研究未知动态f与未知控制系数b的一体化辨识问题。首先,需要考虑用一个离散模型近似表示系统(1)的动态。由于航空发动机是典型的非线性系统,而narmax(non-linear auto regressive moving average with exogenous inputs)模型是非线性系统的一种输入输出描述,能够很好地表征非线性系统的动态特性,因此本发明考虑选取narmax模型作为航空发动机转速系统的离散化表征。
9、将获取的航空发动机模型的燃油流量作为输入,高压转子转速作为输出,采用经典gram-schmidt算法对系统的控制系数和发动机的未知动态进行辨识,同时搭配err准则进行结构项的选择和正交化次序的调整,依据辨识结果求解未知参数。将b的辨识值记为对未知动态的估计信息记作
10、步骤2:控制器设计
11、采用步骤1可以得到航空发动机转速模型中未知动态f的估计信息与未知控制系数b的估计值由于线性自抗扰控制器ladrc的性能在参数b0接近b时较优异,因此将b0设置为或在附近微调。对f的估计准确,因此包含f中的高频分量的信息。如果将加入到eso中,总扰动中将不包含或包含较少的高频动态,低带宽的eso即可实现对总扰动的准确估计。当引入对f的估计信息后,依据公式(1),令x1(t)=n2,定义x3=(b-b0)u为总扰动,记系统(1)可等价地表示为如下的状态空间形式:
12、
13、设计的ieso如下:
14、
15、其中,int(·)是取整运算符,t表示时间,t表示采样周期。l1,l2,l3是观测器增益;分别是x1(t),x2(t),x3(t)的估计值;y(t)表示观测向量;v为测量噪声;为未知动态的估计信息;依据带宽法整定观测器增益为其中,ωo>0是需调节的观测器增益,i=1,2,3,表示依据带宽法整定观测器增益的参数选择。
16、当f的信息未知时,航空发动机转速模型中的总扰动是f+(b-b0)u,由于ieso中包含f的估计信息因此估计的是(b-b0)u。为了补偿总扰动的影响,假设期望的转速轨迹为nr,将控制律设计为:
17、
18、将式子(4)带入系统(1)可得:
19、
20、由于b0整定为接近b且与分别是f与(b-b0)u的估计值。式子(5)近似为即航空发动机转速系统中的未知项被补偿掉,调节控制器增益k1,k2即可保证发动机转速对参考转的跟踪性能。
21、步骤3:ieso收敛性分析
22、当引入对f的估计信息后,令由公式(2)和公式(3)得到ieso的观测误差系统如下:
23、
24、其中,ei表示状态量的观测误差;v表示测量噪声。
25、令式(6)可等价地表示为:
26、
27、其中,
28、
29、求解(7)可得:
30、
31、其中,
32、
33、对式(8)进行求解,考虑观测误差系统(7)满足以下假设:
34、假设1.函数u(t)是有界可导函数,且b-b0和有界。
35、假设2.测量噪声v(t)是有界的,满足|v(t)|≤g.
36、假设3.存在ρ>0使得
37、得到如下ieso观测误差收敛性的结论。
38、定理1:考虑满足假设1-3的观测误差系统(7)。对于任意的μ,存在ωo>0和t1>0使得:
39、|ei(t)|≤μ,i=1,2,3,t>t1.
40、证明:
41、令有:
42、
43、由假设1可推得,存在正整数n0使得由矩阵a,b1的定义及假设1和假设3有:
44、|(a-1b1)i|≤ζ. (10)
45、
46、由于a为hurwitz矩阵,因此存在一个有限时间t1>0,,使得:
47、
48、由可得
49、
50、
51、令显然:
52、
53、对于上式的a和b2有a-1b2=[v(t) 0 0]t.依据式(12)可得
54、
55、
56、由式(9)-(17)和假设2可推得
57、
58、因此有
59、
60、由式(8)可知
61、
62、由于联立式(14)-(20)有
63、
64、因此,对于任意μ>0,存在ωo>0和有限时间t1使得|ei(t)|≤μ,定理1得证。
65、步骤4:闭环系统稳定性分析
66、本发明所设计航空发动机稳态燃油自抗扰控制器的目的是保证航空发动机转速跟踪到参考转速轨迹nr,通过分析转速闭环系统的有界输入、有界输出性来分析转速对参考转速的跟踪性能。
67、由于所设计控制器的输出为带入系统(1)可得闭环系统的动态为:
68、
69、令假设式子(23)等价于:
70、
71、令将式子(24)表示为:
72、
73、其中,
74、式(25)的解为:
75、
76、其中,下面通过证明与的有界性证明en(t)的有界性。
77、的有界性:由定理1可得存在常数ωo>0使得|ei(t)|≤μi,i=1,2,3,t≥t2,其中,依据式(25)有:
78、
79、其中,γ=k1μ1+k2μ2+μ3+ρ1+c.令b4=[0 γ]t,可得
80、
81、所设计的控制器参数k2=2ωc.则
82、
83、由于a1是hurwitz矩阵,因此存在一个有限时间t3>0使得
84、
85、令t1=max{t2,t3},有
86、
87、
88、由式(28)(31)(32)可得
89、
90、的有界性:由式子(30)可得
91、
92、由于
93、
94、由式(34)和式(35)可得,对于任意t≥t1,下列不等式成立:
95、
96、定理证毕。
97、步骤5:仿真验证
98、本发明通过matlab/simulink进行了数值仿真,仿真结果表明,采用所提出的方法可以快速整定参数b0,并有效降低观测器增益。
99、本发明的有益效果:
100、1)基于经典gram-schmidt算法,在发动机模型动态未知的情况下对控制系数b和未知动态进行辨识,基于控制系数的辨识结果,快速整定参数b0。
101、2)通过将未知动态的辨识结果引入eso构建ieso,降低了观测器增益,并给出了ieso观测误差的收敛性以及闭环系统的稳定性分析;
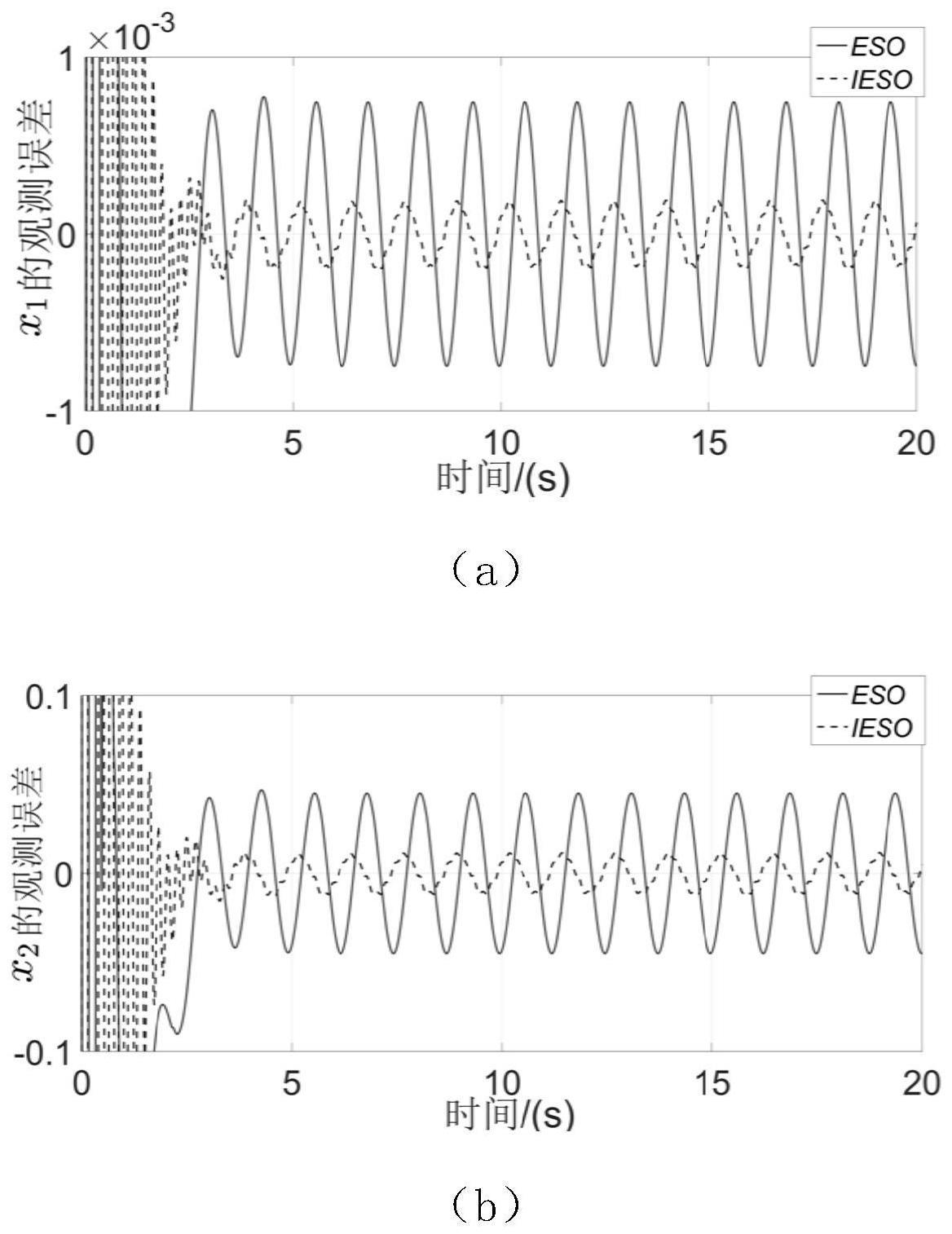
102、3)通过仿真验证了航空发动机转速对参考转速的跟踪性能,并指出ieso的估计误差在相同的观测器增益下小于eso的估计误差。
- 还没有人留言评论。精彩留言会获得点赞!