使用检测到的作为风向的函数的下游尾流损失的风力涡轮机尾流损失控制的制作方法
本发明涉及控制包括多个风力涡轮机的风电园区的风力涡轮机。具体而言,本发明涉及根据尾流损失控制策略来控制风力涡轮机,以控制风力涡轮机生成的尾流,尾流损失控制策略基于在多个风力涡轮机中的(例如,风力涡轮机的下游的)另外的风力涡轮机处经历的作为风向的函数的尾流损失来确定。
背景技术:
1、风力涡轮机用于在风流过风力涡轮机时捕获风中的能量,并且从所捕获的能量生成功率,例如供应给电网。通常,若干风力涡轮机在地理区域中彼此相对靠近地定位,其中这样的一组风力涡轮机可统称为形成风电园区或风电场。
2、可以由风力涡轮机捕获的风能的量根据各种环境因素(诸如风速和风向)而变化。例如,当涡轮机的转子或机舱直接面向来风方向时,即,当风力涡轮机与风对准时,风力涡轮机在捕获风能方面通常可以是最有效的。
3、当风流过风力涡轮机时,在风力涡轮机的下游生成扰动流形式的尾流。也就是说,风力涡轮机下游的风流相对于风力涡轮机的上游受到干扰或扰动。这种扰动可能导致风流速度的降低和/或风流湍流的增加。这些中的每一个导致可以从风捕获的可用能量的量的减少。
4、在风电园区中,第一上游风力涡轮机生成的尾流可能冲击第二下游风力涡轮机,从而相对于不存在上游风力涡轮机的情况,即相对于不存在由上游涡轮机导致的尾流效应的情况,导致下游风力涡轮机的功率生成效率降低。这可称为下游风力涡轮机经历的尾流损失。
5、已知执行风力涡轮机的所谓的尾流转向以使上游涡轮机生成的尾流转向远离下游涡轮机。这可以涉及控制上游涡轮机相对于来风不对准。虽然这可能降低上游涡轮机的能量捕获效率,但是下游涡轮机的能量捕获效率的增加可能导致风电园区的能量捕获效率的总体增加。
6、用于执行尾流转向的已知方法可能是不利的,因为当需要时没有执行尾流转向,当不需要时执行了尾流转向,和/或不正确地执行了尾流转向,使得不能正确地实现下游涡轮机所经历的尾流效应的减少。这些缺点可由以下中的一个或多个导致:风力涡轮机机舱位置或相对风速的不准确检测;与风电园区中风力涡轮机的相对定位有关的不准确信息;和/或由其他因素(诸如地形或其他障碍物、风力条件等)导致的生成的尾流的变化。所产生的效果可能是风电园区的总体能量捕获效率的降低。
7、本发明是针对该背景提出的。
技术实现思路
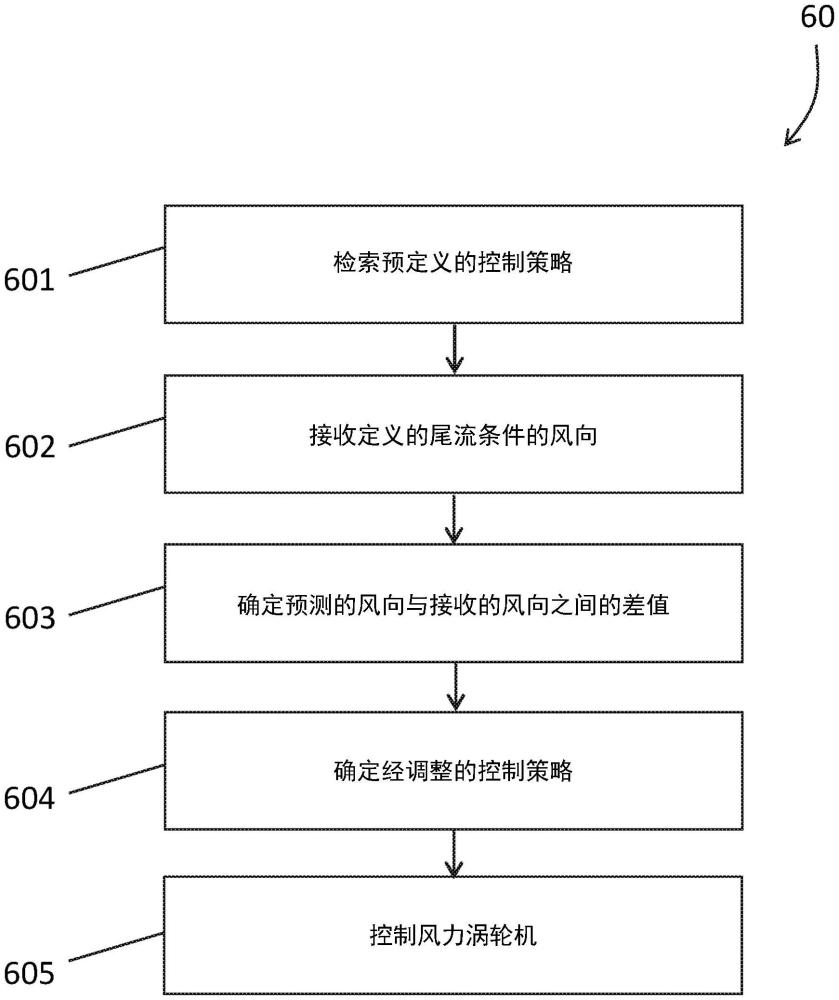
1、根据本发明的一个方面,提供了一种用于控制包括多个风力涡轮机的风电园区的风力涡轮机的方法。该方法包括检索用于风力涡轮机的预定义的尾流损失控制策略,该预定义的尾流损失控制策略用于控制风力涡轮机根据风力涡轮机附近的风向来执行一个或多个尾流损失控制动作,该预定义的尾流控制策略用于控制风力涡轮机的操作以调整风力涡轮机在被预测为将在多个风力涡轮机中的另外的风力涡轮机处导致尾流损失的风向上生成的尾流。该方法包括从另外的风力涡轮机接收信号,所述信号指示被确定为导致另外的风力涡轮机处的定义的尾流条件或状态的风向。该方法包括确定被预测为会导致另外的风力涡轮机处的定义的尾流条件的风向与被确定为导致定义的尾流条件的接收的风向之间的差值。该方法包括根据基于确定的差值(通过确定的差值)的风向偏移量确定经调整的尾流损失控制策略,该经调整的尾流损失控制策略用于控制风力涡轮机执行预定义的尾流损失控制策略的一个或多个尾流损失控制动作。该方法可以包括根据经调整的尾流损失控制策略来控制风力涡轮机。
2、定义的尾流条件可以是完全尾流条件。
3、接收的风向可以是其中另外的风力涡轮机处于风力涡轮机生成的尾流的中心的风向。
4、确定经调整的尾流损失控制策略可以包括基于确定的差值来偏移预定义的尾流损失控制策略在其上被激活的风向。
5、该方法可以包括在另外的风力涡轮机处:确定导致另外的风力涡轮机处的定义的尾流条件的风向;以及将指示被确定为导致另外的风力涡轮机处的定义的尾流条件的风向的信号传输到风力涡轮机。
6、可以在风力涡轮机不执行一个或多个尾流损失控制动作时确定导致另外的风力涡轮机处的定义的尾流条件的风向。
7、导致另外的风力涡轮机处的定义的尾流条件的风向可以在训练时段期间确定,在训练时段中,风电园区的多个风力涡轮机针对多个不同的风向操作。
8、确定导致定义的尾流条件的风向可以包括,针对多个不同的风向:从另外的风力涡轮机的一个或多个传感器接收传感器信号;以及,基于接收的传感器信号确定指示另外的风力涡轮机的转子上的负载不平衡的参数。
9、来自一个或多个传感器的传感器信号可以是来自另外的风力涡轮机的转子叶片的一个或多个叶片负载传感器的叶片负载信号。该参数可以是基于接收的叶片负载信号确定的另外的风力涡轮机的转子的偏航力矩。
10、当在风力涡轮机处激活经调整的尾流损失控制策略以执行一个或多个尾流损失控制动作时,该方法可以包括迭代地执行以下步骤:
11、在所述另外的风力涡轮机处:
12、基于来自所述一个或多个传感器的传感器信号监测指示负载不平衡的参数;以及
13、将指示监测的参数的信号传输到所述风力涡轮机;以及
14、在所述风力涡轮机处:
15、从所述另外的风力涡轮机接收指示监测的参数的信号;
16、基于接收的监测参数来确定用于减小所述另外的风力涡轮机的转子上的负载不平衡的另外的风向偏移量;
17、根据基于确定的差值的风向偏移量和所述另外的风向偏移量确定经进一步调整的尾流损失控制策略,所述经进一步调整的尾流损失控制策略用于控制所述风力涡轮机执行所述预定义的尾流损失控制
18、策略的一个或多个尾流损失控制动作;以及
19、根据经进一步调整的尾流损失控制策略来控制所述风力涡轮机。
20、根据经调整的尾流损失控制策略来控制风力涡轮机可以包括:从风力涡轮机或风电园区的一个或多个风向传感器接收风力涡轮机附近的测量的风向;以及如果基于确定的差值的测量的风向偏移量在尾流损失控制激活风向的预定义范围内,则激活经调整的尾流损失控制策略以执行一个或多个尾流损失控制动作。
21、一个或多个尾流损失控制动作可以包括以下中的至少一个:执行偏航控制以使风力涡轮机的机舱和转子相对于风力涡轮机的塔架围绕偏航角旋转,以调整风力涡轮机生成的尾流的方向;执行倾斜控制以生成围绕倾斜轴线的倾斜力矩,以调整风力涡轮机生成的尾流的方向;执行风力涡轮机的转子叶片的集体桨距控制;以及执行风力涡轮机的转子叶片的单独桨距控制。
22、根据本发明的另一方面,提供了一种在其中存储指令的非暂时性计算机可读存储介质,所述指令在由一个或多个计算机处理器执行时使所述一个或多个计算机处理器执行上面定义的方法。
23、根据本发明的另一方面,提供了一种用于控制包括多个风力涡轮机的风电园区的风力涡轮机的控制器。该控制器被配置为检索用于风力涡轮机的预定义的尾流损失控制策略,预定义的尾流损失控制策略用于控制风力涡轮机根据风力涡轮机附近的风向来执行一个或多个尾流损失控制动作,预定义的损失控制策略用于控制风力涡轮机的操作以调整风力涡轮机在被预测为会导致多个风力涡轮机中的另外的风力涡轮机处的尾流损失的风向上生成的尾流。控制器被配置为从另外的风力涡轮机接收信号,所述信号指示被确定为导致另外的风力涡轮机处的尾流损失的风向。控制器被配置为确定被预测为会导致尾流损失的风向与被确定为导致尾流损失的接收的风向之间的差值。控制器被配置为根据基于确定的差值的风向偏移量确定经调整的尾流损失控制策略,该经调整的尾流损失控制策略用于控制风力涡轮机执行预定义的尾流损失控制策略的一个或多个尾流损失控制动作。控制器被配置为根据经调整的尾流损失控制策略来控制风力涡轮机。
24、根据本发明的另一方面,提供了一种用于如上所定义的风电园区的控制系统,该控制系统包括多个风力涡轮机,该多个风力涡轮机包括所述风力涡轮机和所述另外的风力涡轮机。控制系统包括如上所述的控制器。控制系统包括用于控制另外的风力涡轮机的另外的控制器,另外的控制器被配置为:确定导致另外的风力涡轮机处的尾流损失的风向;以及将指示被确定为导致另外的风力涡轮机处的尾流损失的风向的信号传输到风力涡轮机。
25、根据本发明的一个方面,提供了一种包括如上定义的控制器的风力涡轮机。
26、根据本发明的另一方面,提供了一种包括如上所述的控制系统的风电园区。
27、根据本发明的一个方面,提供了一种用于控制包括多个风力涡轮机的风电园区的风力涡轮机的方法。该方法包括检索用于风力涡轮机的预定义的尾流损失控制策略,该预定义的尾流损失控制策略用于控制风力涡轮机根据风力涡轮机附近的风向来执行一个或多个尾流损失控制动作,该预定义的尾流损失控制策略用于控制风力涡轮机的操作以调整风力涡轮机在被预测为会在多个风力涡轮机中的另外的风力涡轮机处导致尾流损失的风向上生成的尾流。该方法包括从另外的风力涡轮机接收指示另外的风力涡轮机处的当前尾流条件(例如,完全尾流条件)的信号。该方法包括接收指示风力涡轮机附近的当前风向的信号。该方法包括确定被预测为会导致另外的风力涡轮机处的当前尾流条件的风向与对应于定义的尾流条件的当前风向之间的差值。该方法包括根据基于确定的差值的风向偏移量确定经调整的尾流损失控制策略,该经调整的尾流损失控制策略用于控制风力涡轮机执行预定义的尾流损失控制策略的一个或多个尾流损失控制动作。该方法包括根据经调整的尾流损失控制策略来控制风力涡轮机。
- 还没有人留言评论。精彩留言会获得点赞!