一种风电机组抗涡激振动控制方法、系统、介质及设备与流程
本发明涉及风电机组抗涡激共振的,尤其是指一种风电机组抗涡激振动控制方法、系统、介质及设备。
背景技术:
1、当均匀的流体流过圆柱时,会在背流面产生交替脱落的涡旋,这种现象叫做卡门涡激。交替脱落的涡旋会对圆柱体产生有规律的升力激励,当涡旋的脱落频率与塔架固有频率重合时,就会激发共振。因此,由卡门涡街诱导产生的共振现象叫做涡激共振,如图1所示。
2、风机机组的涡激振动是由于塔架背风侧空气旋涡脱落激发的塔架振动。随着风机的越来越大型化,风机塔架高度的增加,风机结构的固有频率下降,增加了风机涡激的风险,当旋涡脱落频率与塔架振动频率接近时,由于共振的产生,气动载荷会引起塔架明显的振幅,进而引发结构承载风险。当叶片处于非发电运行状态下时,叶片各截面处于大攻角深失速区,由于气动力的作用,通常在一阶或者二阶的摆振气动阻尼为负,此时叶片表现出自激振动,振幅明显,引起叶片及机组部分零部件载荷过高,可能引发机组发生破坏。
3、现有技术中涡激振动处于风机吊装并网前期一般处理方法是在塔筒上安装扰流条或者安装网兜,但成本较高。在机组并网发电后,主要通过偏航对风和调整叶片桨距角来抑制通电状态下风机的涡激振动。但没有一种能确保机组通电状态和非通电状态全工况下都能抑制叶片涡激振动的方法。
4、在中国发明专利202011166480.0中,公开了一种抑制风机涡激振动的方法,该种方法包括在风机的非通电状态下,参考风机能承受的载荷范围,调整叶片的桨距角,但是这种非通电状态下的抗涡激方法,机组在大风期间,易发生风大把变桨桨叶吹动,变桨实际桨叶位置和掉电前存储变桨位置不一致,从而导致实际控制中,机组易发生振动或者扫塔的现象发生,未有一个机组上电前的变桨变桨角度的自适应检测功能,来确保风机变桨角度的正确和确保风机的安全。
5、在中国发明专利申请202211262912.7中,公开了一种消除风机涡激振动的方法,该方法包括在plc主控程序中增加变桨消振和偏航消振的控制策略,消除涡激振动,但是这种方法并不能确保风机变桨控制器发生故障或者风电机组掉电的情况确保风机能抑制风机的涡激振动,无法达到全工况下保证风机的安全。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出了一种风电机组抗涡激振动控制方法、系统、介质及设备,使风电机组在通电状态和非通电状态全工况下都能抑制叶片涡激振动,以此改变叶片阻尼,抑制叶片振动频率与塔架振动频率接近时共振现象的发生。
2、本发明的目的通过下述技术方案实现:一种风电机组抗涡激振动控制方法,该方法是以满足风电机组各部件预设载荷为条件,确定风电机组的三个桨叶的变桨桨距角的角度,此时确定的桨叶一的变桨桨距角为抗涡激角度,通过变桨桨距角的控制将桨叶一变桨到抗涡激角度位置,并使另外两只桨叶处于顺桨位置,再通过修改变桨参数设置变桨的软限位位置,使风电机组在通电工况以及非通电工况都处于该抗涡激角度,破坏稳定漩涡的形成;
3、使风电机组在非通电工况后执行通电工况,使用变桨的接近开关对三个变桨桨距角进行自校验,使风电机组非通电工况和通电工况的实际变桨桨距角的角度一致;若在风电机组通电工况下,风电机组在满足预设载荷条件的变桨桨距角下停机,且风电机组的风速、风向以及振动加速度大于风电机组主控内预设的条件,则由风电机组主控执行偏航对风,抑制涡激振动的增大。
4、进一步,该方法包括以下步骤:
5、s1、在满足风电机组各部件预设载荷的条件下,确定风电机组的三个桨叶的变桨桨距角的角度,此时确定的桨叶一的变桨桨距角为抗涡激角度;
6、s2、根据步骤s1得到的变桨桨距角修改风电机组变桨参数,使风电机组处于该变桨桨距角下变桨能够触发变桨软限位,变桨电机刹车投入;同时设置风电机组正常待机的停机桨距角并计算风电机组通电工况下变桨断安全链或者风电机组非通电工况下的变桨桨距角;
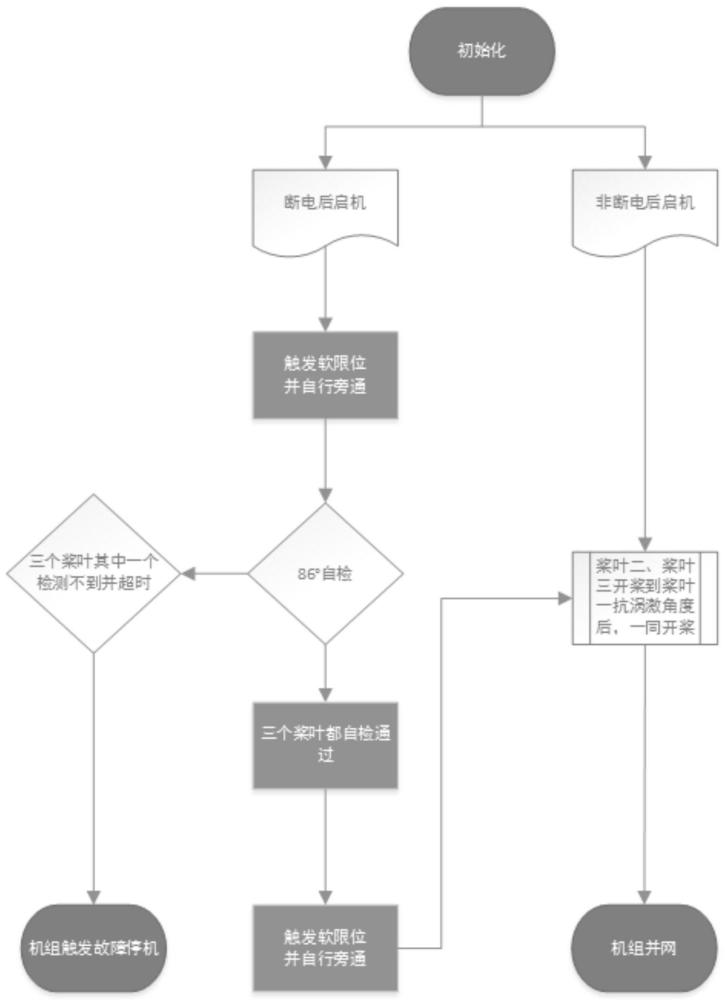
7、s3、使风电机组进入第一次通电启机工况,风电机组的桨叶二和桨叶三同时开桨,直到两者达到风电机组桨叶一的抗涡激角度后,桨叶一、桨叶二和桨叶三一同开桨;
8、s4、调整变桨过程中的接近开关撞块,使三个桨叶处于预设的角度时均能分别检测到三个桨叶的接近开关;
9、s5、风电机组在非通电工况后执行通电工况,三个桨叶的变桨桨距角处于预设的角度时进行自适应自检,检测三个桨叶各自的接近开关;若三个桨叶均同时检测到各自的接近开关,则触发软限位位置并自行旁通后,三个桨叶返回正常待机的停机桨距角状态,风电机组启机并网;若三个桨叶的其中一个桨叶检测不到接近开关,则风电机组触发故障停机,执行步骤s6;
10、s6、触发风电机组主控内的检修模式,使三个桨叶的变桨桨距角触发变桨硬限位位置,进而锁定叶轮,由人员进入轮毂检修,检修完成后手动退出检修模式,使三个桨叶回到步骤s2确定的停机桨距角;
11、s7、使风电机组处于通电工况,若风电机组在通电工况下停机,风电机组发生涡激振动,且风电机组的风速、风向以及振动加速度大于风电机组主控内预设的条件,则风电机组主控执行偏航对风控制。
12、进一步,所述步骤s1包括以下步骤:
13、在满足风电机组各部件预设载荷的条件下,确定风电机组的三个桨叶的变桨桨距角的角度(a1,a2,a3),其中a1为桨叶一的变桨桨距角,a2为桨叶二的变桨桨距角,a3为桨叶三的变桨桨距角,此时确定的桨叶一的变桨桨距角a1为抗涡激角度。
14、进一步,所述步骤s2包括以下步骤:
15、根据步骤s1得到的变桨桨距角(a1,a2,a3),修改风电机组变桨参数,使风电机组处于该变桨桨距角(a1,a2,a3)下变桨能够触发变桨软限位,变桨电机刹车投入;
16、同时设置风电机组正常待机的停机桨距角并计算风电机组通电工况下变桨断安全链或者风电机组非通电工况下的变桨桨距角,公式如下:
17、sd=se-0.1;
18、其中,sd为风电机组正常待机的停机桨距角,即变桨桨距角(a1,a2,a3),se为风电机组通电工况下变桨断安全链或者风电机组非通电工况下的变桨桨距角。
19、进一步,所述步骤s4包括以下步骤:
20、调整变桨过程中的86°接近开关撞块,使三个桨叶处于变桨86°的位置时均能分别检测到三个桨叶的接近开关。
21、进一步,所述步骤s5包括以下步骤:
22、风电机组在非通电工况后执行通电工况,三个桨叶的变桨桨距角处于86°时进行自适应自检,风电机组变桨桨距角由待机角度下的停机桨距角变化至断安全链桨距角,主控发出变桨旁通指令后,桨叶穿过软限位位置直至设定的86°进行自检,检测三个桨叶各自的接近开关;若三个桨叶均同时检测到各自的接近开关,则在桨叶一触发软限位位置,且主控自动进行变桨旁通后,三个桨叶返回正常待机的停机桨距角状态,风电机组启机并网;若三个桨叶的其中一个桨叶检测不到接近开关,且自检时间超出预设的时间,则风电机组触发故障停机,执行步骤s6。
23、进一步,所述步骤s6包括以下步骤:
24、在风电机组停机且满足预设风况的状态下,触发风电机组主控plc内的检修模式,使三个桨叶的变桨桨距角触发变桨硬限位位置,进而锁定叶轮,由人员进入轮毂检修,检修完成后手动退出检修模式,使三个桨叶回到步骤s2确定的停机桨距角。
25、一种风电机组抗涡激振动控制系统,用于实现上述风电机组抗涡激振动控制方法,包括:
26、变桨桨距角获取模块,在满足风电机组各部件预设载荷的条件下,确定风电机组的三个桨叶的变桨桨距角的角度;
27、停机桨距角计算模块,根据变桨桨距角计算风电机组正常待机的停机桨距角;
28、接近开关调整模块,调整变桨过程中的接近开关撞块,使三个桨叶处于86°时均能分别检测到三个桨叶的接近开关;
29、自适应校验模块,用于风电机组在非通电工况后执行通电工况,使风电机组非通电工况和通电工况的实际变桨桨距角的角度一致;
30、主控模块,用于控制风电机组启停机、变桨桨距角角度以及偏航对风。
31、一种存储有指令的非暂时性计算机可读介质,其特征在于,当所述指令由处理器执行时,执行根据上述风电机组抗涡激振动控制方法的步骤。
32、一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,其特征在于,所述处理器执行存储器存储的程序时,实现上述风电机组抗涡激振动控制方法。
33、本发明与现有技术相比,具有如下优点与有益效果:
34、1、本发明能够实现风电机组非通电工况下,顺桨到满足载荷的软限位位置,抑制风机的涡激振动且在机组断电后第一次启机时做变桨角度自适应校验,确保风电机组角度的正确性及安全性;
35、2、本发明能够实现风电机组在通电工况并位于正常待机的角度下,触发软限位,使变桨电机刹车投入,进而实现桨叶不易吹飞,确保各桨叶的安全;
36、3、本发明能够实现在通电工况下,风电机组在安全链断开或者变桨断efc状态下,风电机组桨叶位置顺桨至变桨软限位,使变桨电机刹车投入;
37、4、本发明能够实现风电机组在通电工况下,通过偏航控制来抑制风机的涡激振动;
38、5、本发明不需要对风电机组增加额外硬件,只需修改变桨参数和更新主控程序,就能达到抗涡激的目的,易于现场推广。
- 还没有人留言评论。精彩留言会获得点赞!