本发明涉及风机监测的领域,尤其涉及基于测风雷达的风机载荷监测方法和系统。
背景技术:
1、风力作为一种清洁能源,其现有的开发效率仍然较低。风机作为风力发电的主要设备,当气流流动穿过风机的叶片后,会带动叶片旋转从而进行发电操作。当风机所处环境的风速过大时,容易导致风机的叶片以过快速度进行转动,从而增大风机的运转载荷,当风机的运转载荷增加到一定程度时,会使得风机发生不可逆的损坏,降低风机的工作寿命。为了保证风机能够保持以最大效率进行稳定可持续的运转,需要对风机进行载荷监测,及时调整风机的运转状态,从而保证风机的运转可靠性和可持续性。
技术实现思路
1、本发明的目的在于提供基于测风雷达的风机载荷监测方法和系统,其分析与风机阵列匹配的测风雷达阵列的测风结果数据,将风机阵列内部所有风机划分为若干风机集合,便于对所有风机进行区分化的运转负荷状态分析,准确识别其中处于超负荷运转状态的风机;还从风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据,进一步得到处于超负荷运转状态的风机对应受到的气流作用信息,以此对相应风机受到的气流作用进行定量确定;再基于处于超负荷运转状态的风机对应受到的气流作用信息,判断处于超负荷运转状态的风机是否允许进行运转状态变更,以此调整处于超负荷运转状态的风机的运转动作状态,实现对风机载荷的及时准确监测,有效调整风机的运转状态,保证风机的运转可靠性和可持续性。
2、本发明是通过以下技术方案实现:
3、基于测风雷达的风机载荷监测方法,包括:
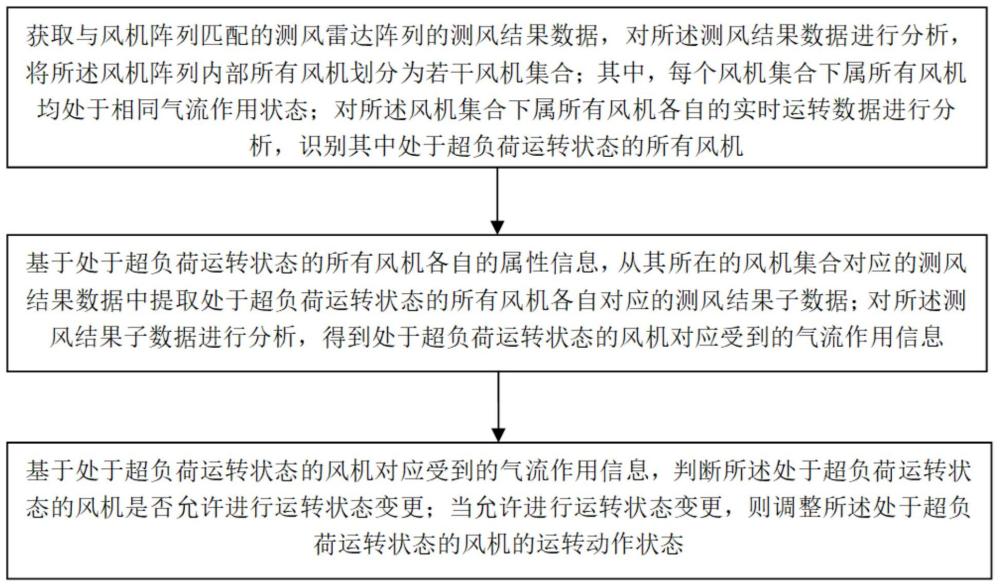
4、获取与风机阵列匹配的测风雷达阵列的测风结果数据,对所述测风结果数据进行分析,将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机均处于相同气流作用状态;对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机;
5、基于处于超负荷运转状态的所有风机各自的属性信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据;对所述测风结果子数据进行分析,得到处于超负荷运转状态的风机对应受到的气流作用信息;
6、基于处于超负荷运转状态的风机对应受到的气流作用信息,判断所述处于超负荷运转状态的风机是否允许进行运转状态变更;当允许进行运转状态变更,则调整所述处于超负荷运转状态的风机的运转动作状态。
7、可选地,获取与风机阵列匹配的测风雷达阵列的测风结果数据,对所述测风结果数据进行分析,将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机均处于相同气流作用状态;对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机,包括:
8、获取与风机阵列匹配的测风雷达阵列下属所有测风雷达各自的测风结果数据,基于所述测风雷达阵列下属所有测风雷达各自的位置信息,对所述测风结果数据进行分析,确定每个测风雷达对应测风覆盖空间范围内的气流流动方向分布信息;将所述测风雷达阵列下属所有测风雷达对应的气流流动方向分布信息进行整合,得到所述风机阵列所在三维空间范围的整体气流流动方向分布信息;基于所述整体气流流动方向分布信息,确定所述风机阵列下属所有风机各自受到的气流作用方向,以此将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机的受到的气流作用方向均相同;
9、获取所述风机集合下属所有风机各自的实时旋转速度数据和电能生成数据,对所述实时旋转速度数据和所述电能生成数据进行分析,得到所述风机的风力发电转换效率值;将所述风力发电转换效率值与预设效率阈值进行对比,若所述风力发电转换效率值大于或等于预设效率阈值,则判断所述风机处于超负荷运转状态;否则,判断所述风机不处于超负荷运转状态。
10、可选地,对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机,包括:
11、步骤s1,利用下面公式(1),对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机,
12、
13、在上述公式(1)中,d(a,b)表示所述风机集合中第a行第b列风机的超负荷运转状态判定值;t0表示所述风机集合启动时刻;t表示分析实时运转数据对应所需的时长;k表示整数变量;i(a,b)(t0+k×t)表示所述风机集合中第a行第b列风机在t0+k×t时刻的电流值;t表示当前时刻;表示向下取整;im表示正常运行的额定电流值;if[]表示判断函数,判断括号内的算式是否成立,若成立,则判断函数的函数值为1,若不成立,则判断函数的函数值为0;
14、若d(a,b)=1,则表示所述风机集合中第a行第b列风机处于超负荷运转状态;
15、若d(a,b)=0,则表示所述风机集合中第a行第b列风机不处于超负荷运转状态;
16、步骤s2,利用下面公式(2),根据识别出的处于超负荷运转状态的所有风机超负荷运转的时长占比,生成超负荷运转风机矩阵,
17、
18、在上述公式(2)中,h(a,b)表示生成的超负荷运转风机矩阵中第a行第b列位置的元素值;
19、步骤s3,利用下面公式(3),根据所述超负荷运转风机矩阵,生成风机阵列内部的超负荷运转观察图像,
20、
21、在上述公式(3)中,g(a,b)表示生成的风机阵列内部的超负荷运转观察图像的图像矩阵中第a行第b列位置的色度值。
22、可选地,基于处于超负荷运转状态的所有风机各自的属性信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据;对所述测风结果子数据进行分析,得到处于超负荷运转状态的风机对应受到的气流作用信息,包括:
23、获取处于超负荷运转状态的所有风机各自的位置信息,基于所述位置信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风速度子数据;
24、对测风速度子数据进行分析,得到处于超负荷运转状态的风机的叶片所在平面的气流作用方向信息。
25、可选地,基于处于超负荷运转状态的风机对应受到的气流作用信息,判断所述处于超负荷运转状态的风机是否允许进行运转状态变更;当允许进行运转状态变更,则调整所述处于超负荷运转状态的风机的运转动作状态,包括:
26、基于处于超负荷运转状态的风机的叶片所在平面的气流作用方向信息,确定所述叶片所在平面与其受到的气流作用方向之间的夹角,若所述夹角为直角,则判断所述处于超负荷运转状态的风机允许进行运转状态变更;否则,判断所述处于超负荷运转状态的风机不允许进行运转状态变更;
27、当允许进行运转状态变更,则基于所述处于超负荷运转状态的风机的叶片允许变动偏航角度冗余值,逐渐改变所述处于超负荷运转状态的风机的叶片所在平面的偏航角,直到所述处于超负荷运转状态的风机的实际运转功率下降至预设运转功率阈值为止。
28、基于测风雷达的风机载荷监测系统,包括:
29、风机集合划分模块,用于获取与风机阵列匹配的测风雷达阵列的测风结果数据,对所述测风结果数据进行分析,将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机均处于相同气流作用状态;
30、风机负荷识别模块,用于对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机;
31、测风数据筛选模块,用于基于处于超负荷运转状态的所有风机各自的属性信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据;
32、气流作用信息确定模块,用于对所述测风结果子数据进行分析,得到处于超负荷运转状态的风机对应受到的气流作用信息;
33、风机变更权限确定模块,用于基于处于超负荷运转状态的风机对应受到的气流作用信息,判断所述处于超负荷运转状态的风机是否允许进行运转状态变更;
34、风机运转状态调整模块,用于当允许进行运转状态变更,则调整所述处于超负荷运转状态的风机的运转动作状态。
35、可选地,所述风机集合划分模块用于获取与风机阵列匹配的测风雷达阵列的测风结果数据,对所述测风结果数据进行分析,将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机均处于相同气流作用状态,包括:
36、获取与风机阵列匹配的测风雷达阵列下属所有测风雷达各自的测风结果数据,基于所述测风雷达阵列下属所有测风雷达各自的位置信息,对所述测风结果数据进行分析,确定每个测风雷达对应测风覆盖空间范围内的气流流动方向分布信息;将所述测风雷达阵列下属所有测风雷达对应的气流流动方向分布信息进行整合,得到所述风机阵列所在三维空间范围的整体气流流动方向分布信息;基于所述整体气流流动方向分布信息,确定所述风机阵列下属所有风机各自受到的气流作用方向,以此将所述风机阵列内部所有风机划分为若干风机集合;其中,每个风机集合下属所有风机的受到的气流作用方向均相同;
37、所述风机负荷识别模块用于对所述风机集合下属所有风机各自的实时运转数据进行分析,识别其中处于超负荷运转状态的所有风机,包括:
38、获取所述风机集合下属所有风机各自的实时旋转速度数据和电能生成数据,对所述实时旋转速度数据和所述电能生成数据进行分析,得到所述风机的风力发电转换效率值;将所述风力发电转换效率值与预设效率阈值进行对比,若所述风力发电转换效率值大于或等于预设效率阈值,则判断所述风机处于超负荷运转状态;否则,判断所述风机不处于超负荷运转状态。
39、可选地,所述测风数据筛选模块用于基于处于超负荷运转状态的所有风机各自的属性信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据,包括:
40、获取处于超负荷运转状态的所有风机各自的位置信息,基于所述位置信息,从其所在的风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风速度子数据;
41、所述气流作用信息确定模块用于对所述测风结果子数据进行分析,得到处于超负荷运转状态的风机对应受到的气流作用信息,包括:
42、对测风速度子数据进行分析,得到处于超负荷运转状态的风机的叶片所在平面的气流作用方向信息。
43、可选地,所述风机变更权限确定模块用于基于处于超负荷运转状态的风机对应受到的气流作用信息,判断所述处于超负荷运转状态的风机是否允许进行运转状态变更,包括:
44、基于处于超负荷运转状态的风机的叶片所在平面的气流作用方向信息,确定所述叶片所在平面与其受到的气流作用方向之间的夹角,若所述夹角为直角,则判断所述处于超负荷运转状态的风机允许进行运转状态变更;否则,判断所述处于超负荷运转状态的风机不允许进行运转状态变更;
45、所述风机运转状态调整模块用于当允许进行运转状态变更,则调整所述处于超负荷运转状态的风机的运转动作状态,包括:
46、当允许进行运转状态变更,则基于所述处于超负荷运转状态的风机的叶片允许变动偏航角度冗余值,逐渐改变所述处于超负荷运转状态的风机的叶片所在平面的偏航角,直到所述处于超负荷运转状态的风机的实际运转功率下降至预设运转功率阈值为止。
47、与现有技术相比,本发明具有如下有益效果:
48、本技术提供的基于测风雷达的风机载荷监测方法和系统分析与风机阵列匹配的测风雷达阵列的测风结果数据,将风机阵列内部所有风机划分为若干风机集合,便于对所有风机进行区分化的运转负荷状态分析,准确识别其中处于超负荷运转状态的风机;还从风机集合对应的测风结果数据中提取处于超负荷运转状态的所有风机各自对应的测风结果子数据,进一步得到处于超负荷运转状态的风机对应受到的气流作用信息,以此对相应风机受到的气流作用进行定量确定;再基于处于超负荷运转状态的风机对应受到的气流作用信息,判断处于超负荷运转状态的风机是否允许进行运转状态变更,以此调整处于超负荷运转状态的风机的运转动作状态,实现对风机载荷的及时准确监测,有效调整风机的运转状态,保证风机的运转可靠性和可持续性。