基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置
本发明涉及可再生流体动能俘获及转化的,具体涉及一种基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置。
背景技术:
1、流致振动是一种广泛存在于自然界和工程领域的典型流固耦合现象,它主要包含两种振荡形式:涡激振动和驰振。不同于涡激振动在振幅极限环上的自限性特点,驰振的振动振幅在流速超过临界值后会一直增长,直至结构遭到破坏,因而是一种高能现象。近年来,研究发现结构在驰振过程中可以转化可观的流体动能使得其具有可再生能源俘获的潜力。
2、当前人类社会日益增长的能源需求与枯竭的环境资源之间形成了尖锐矛盾,寻找并研究可再生能源俘能方式无疑是值得迫切关注的。占地球总面积70%以上的海洋拥有非常丰富的能源储备,据统计,全球仅海流能的储备即达到了766亿kw。目前,以叶轮机为转化装置的潮汐能能量转化器,以波浪能为来源的近岸振荡水柱和离岸振荡俘体转化装置,以及结合风能与波浪能的海上浮式风力涡轮机装置得到了丰富的发展。相比于以上技术,基于驰振的清洁能源收集装置具有其显著的特色优势。例如,在环境流速大于驰振失稳临界点后,集能系统可以在后续宽域的流动速度下保持高效工作,且对环境友好。这类驰振能量收集装置主要由非完全对称振动振子,传动装置和发电设备系统组成。工作原理为:当来流流体横向绕流振子时,会引起其产生相对流动攻角,进而引起非对称的驰振力。当驰振力大于整个系统阻尼力时,将刺激振子发生低频、高幅振荡。在此过程中,传动装置和发电设备会将振动的机械能转为所需电能。
3、已有不少技术发展基于驰振的集能装置,但仍存在如下缺陷:(1)由于驰振具有失稳临界速度。在环境流速大于失稳速度时,振子可以发生低频、大幅振荡进而可通过流固耦合效应俘能。但在失稳速度之下时,振子无法启振,使得整个集能装置失效;(2)驰振俘能虽有独特优势,但其能量转化效率有限,有进一步提升空间。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置,可有效提高驰振集能装置在驰振失稳临界速度前的工作能力,能源转化率高,绿色环保,适用于水下环境。
2、根据本发明实施例的基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置,包括:
3、支架;
4、驰振半柱集能系统,所述驰振半柱集能系统设置在所述支架上;当流体流速大于所述驰振半柱集能系统的驰振失稳临界速度时,所述驰振半柱集能系统产生驰振振荡,采集流体动能;
5、柔性尾流拍动集能系统,所述柔性尾流拍动集能系统设置在所述支架上,且在来流方向上间隔开地布置在所述驰振半柱集能系统的后方;当流体流速小于驰振失稳临界速度而无法使所述驰振半柱集能系统启振时,所述柔性尾流拍动集能系统俘获在所述驰振半柱集能系统后方脱落的非定常流动漩涡环境作用下的流体动能;当所述驰振半柱集能系统在流体作用下产生驰振振荡时,所述柔性尾流拍动集能系统辅助俘获流体动能。
6、根据本发明实施例的基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置,工作原理如下:
7、在水域来流速度的作用下,当流体流经驰振半柱集能系的驰振振子时,会激励驰振振子产生位移。假设该运动的速度为u1,该速度u1会与来流速度u形成相对夹角。由于上游驰振振子在有夹角迎流下无法保持对称性,因此会受到非垂直于运动方向的力分量,这里可称为驰振力。当水域来流速度u小于驰振振子的驰振失稳临界速度u0时,流体对驰振振子所造成的驰振力小于抑制振荡的阻尼力。此时,驰振振子无法被流体激励产生驰振,因此其振动幅度较小或无振动,进而所述驰振半柱集能系统失效。然而,小幅度振荡的上游驰振振子的尾流所泄旋涡较为集中规律,有利于所述柔性尾流拍动集能系统工作并俘能。一方面,上游驰振振子的泄涡尾流中具有交替的非定常旋涡,有利于激励所述柔性尾流拍动集能系统产生拍动行为;另一方面,即使在均匀来流速度下,所述柔性尾流拍动集能系统亦可以自激产生拍动行为。因此,所述柔性尾流拍动集能系统能够在上游驰振振子的泄涡尾流中发生大幅拍动现象,来持续俘获流体动能,从而提高整体设备的能量转化效率。
8、随着水域来流速度u的增加,上游驰振振子受到的驰振力也会随之增加。特别地,当水域来流速度u大于驰振振子的驰振失稳临界速度u0时,流体对驰振振子所造成的驰振力大于抑制振荡的阻尼力,进而激励上游驰振振子发生大幅摆动,进而通过所述驰振半柱集能系统持续将流体动能转化为机械能再转化为电能。
9、随着水域来流速度u的变化,当上游所述驰振半柱集能系统的工作效率受限时,下游所述柔性尾流拍动集能系统则具有有利工作条件。需要注意的是,本发明实施例中的所述驰振半柱集能系统和所述柔性尾流拍动集能系统也可在相对有利条件下同时工作,提高整体集能系统的效率和作业能力。
10、根据本发明实施例的基于刚性驰振半柱与柔性尾流拍动板的流体动能俘获装置,具有如下的优势:(1)可有效提高驰振集能装置在驰振失稳临界速度前的工作能力。具体而言,驰振现象具有典型的驰振失稳临界速度u0,在环境水域流速小于u0时,驰振振子结构所受的非对称力小于所述驰振半柱集能系统阻尼力,进而将抑制驰振振子的振荡,使得驰振俘能机制失效。此时,无法驰振的上游驰振振子尾流旋涡较为集中,下游所述柔性尾流拍动集能系统可在驰振阵子后方脱落的涡街中大幅摆动进而有效俘能,弥补驰振俘能的现有缺陷,扩宽驰振俘能机制的应用范围。(2)能源转化率高。结合上游所述驰振半柱集能系统的驰振和下游所述柔性尾流拍动集能系统在非定常尾流旋涡作用下的柔性拍动两种集能途径,可显著提高流体动能俘获效率。(3)绿色环保。一方面,该装置可有效俘获可再生的流体动能;另一方面,该装置相比叶片、轮机等旋转俘能机构,对海洋生物环境等更为友好。
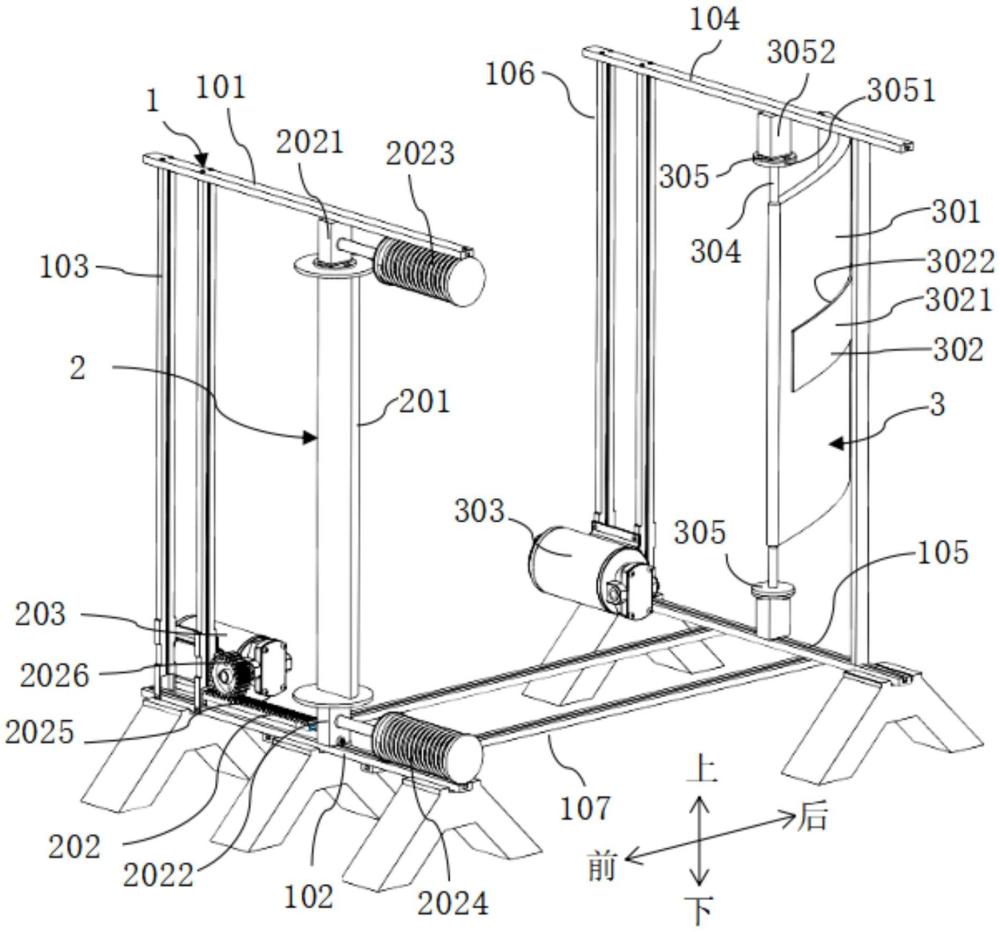
11、在一些实施例中,所述柔性尾流拍动集能系统包括柔性拍动板、压电结构和拍动板压电集能装置,所述柔性拍动板的前缘呈竖向延伸并与所述支架相连,所述柔性拍动板的后缘为自由端,所述柔性拍动板能做多自由拍动和弯折运动;所述压电结构设置在所述柔性拍动板上,所述拍动板压电集能装置与所述压电结构连接。
12、在一些实施例中,所述柔性尾流拍动集能系统还包括轴杆,所述轴杆与所述柔性拍动板的前缘相连,所述轴杆可转动地支撑在所述支架上。
13、在一些实施例中,所述轴杆通过转动件与所述支架相连。
14、在一些实施例中,所述转动件有两个,两个所述转动件分别对应地与所述轴杆的上端和下端相连,且两个所述转动件与所述支架相连。
15、在一些实施例中,所述压电结构包括压电层,所述压电层固定在所述柔性拍动板上。
16、在一些实施例中,所述压电结构还包括基片层,所述基片层贴固在所述柔性拍动板上,所述压电层贴在所述基片层上。
17、在一些实施例中,所述驰振半柱集能系统包括驰振半柱振子、传动机构和振动集能装置;所述驰振半柱振子为半圆柱形,且平面朝前半圆柱面朝后竖向地布置在所述柔性拍动板的前方并通过所述传动机构与所述支架相连,所述振动集能装置与所述传动机构相连。
18、在一些实施例中,所述传动机构包括上滑动件、下滑动件、上弹簧、下弹簧、齿条和齿轮;所述上滑动件和所述下滑动件分别与所述驰振半柱振子的上端和下端固定,所述上滑动件和所述下滑动件分别可横向直线滑动地设置在所述支架上;所述上弹簧和所述下弹簧在横向上布置在所述上滑动件和所述下滑动件的一侧,且所述上弹簧和所述下弹簧的一端与所述支架固定,所述上弹簧和所述下弹簧的另一端分别与所述上滑动件和所述下滑动件相连;所述齿条在横向上布置在所述下滑动件的另一侧,且可横向直线滑动地设置在所述支架上,所述齿条的一端与所述下滑动件固定;所述齿轮与所述齿条啮合,所述齿轮通过齿轮周与所述振动集能装置相连。
19、在一些实施例中,根据仿真实验验证结果,所述驰振半柱集能系统的阻尼系数选为0.15~0.25,所述驰振半柱振子结构质量与自身排水质量比为1.5~5:1;所述半柱振子的平面为迎流面;所述柔性拍动板的前缘至后缘的长度为3d,其中d表示所述驰振半柱振子的直径,所述驰振半柱振子和所述柔性拍动板的间距为g,g=4d,所述柔性尾流拍动集能系统的无量纲刚度为0.4~0.6。
20、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!