一种基于神经网络的风电机组载荷自适应控制方法
本发明涉及风电机组载荷控制,具体涉及一种基于神经网络的风电机组载荷自适应控制方法。
背景技术:
1、风电机组正在朝着大型化、智能化和深远化的方向发展,如何让机组在提高输出功率的同时安全稳定运行成为了风力发电技术发展过程中的重要研究领域,一个方面是在风电机组的设计和制造阶段,使用高强度材料或优化结构设计,提高机组能承受的极限和疲劳载荷,降低风电机组关键部件重量,另一方面是在风电机组运行过程中采用先进的控制策略,确保在不同负载条件下运行的稳定性和可靠性。
2、由于风速和风向的变化、风电机组内部复杂的动力学和耦合效应等因素,风电机组的控制面临着很大的挑战,风电机组在运行过程中具有很强的非线性、时变、多变量的动态特性,传统的线性控制方法往往无法满足其控制需求,同时,风电机组在运行中经常面临非常规工况,需要及时调整控制策略以保证系统的安全运行,风电机组控制系统是一个复杂且对控制性能要求高的系统,对于风电机组控制系统的研究,需要针对不同阶段和不同情况对控制策略进行分析。
3、为应对风电机组恶劣的运行条件,控制系统需要快速响应环境载荷变化和电网负载变化,通过风电机组侧控制抑制环境载荷,电气侧控制应对电网负载变化,保证机组的安全稳定运行,但是现有的风电机组载荷自适应控制方法还存在以下问题:
4、(1)风电机组中风速作主要扰动输入,具有极强的波动性与不确定性,当风电机组变桨时,风电机组的结构和参数都会发生变化,导致实际的机组与根据单一平衡点构建的模型产生误差,风速扰动与模型误差会导致系统的不确定性,使控制器对风电机组的控制性能下降,在风电机组的变桨控制阶段,不需要最大化风能的捕获效率,稳定输出功率和提高系统的鲁棒性是变桨控制的重要问题;
5、(2)现有的风电机组载荷自适应模块将非线性问题转化为求解二次规划问题,并通过数值方法进行求解,能较好的处理风电机组的非线性特性,但是预测模型参数是固定的,不符合风电机组运行时变参数的特性,容易导致模型失配问题。
技术实现思路
1、本发明的目的在于提供一种基于神经网络的风电机组载荷自适应控制方法,以解决现有技术中对于预测模型参数固定,不符合风电机组运行时变参数的特性,容易导致模型失配问题、无法稳定输出功率以及系统鲁棒性的技术问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
3、本发明提供了一种基于神经网络的风电机组载荷自适应控制方法,包括以下步骤:
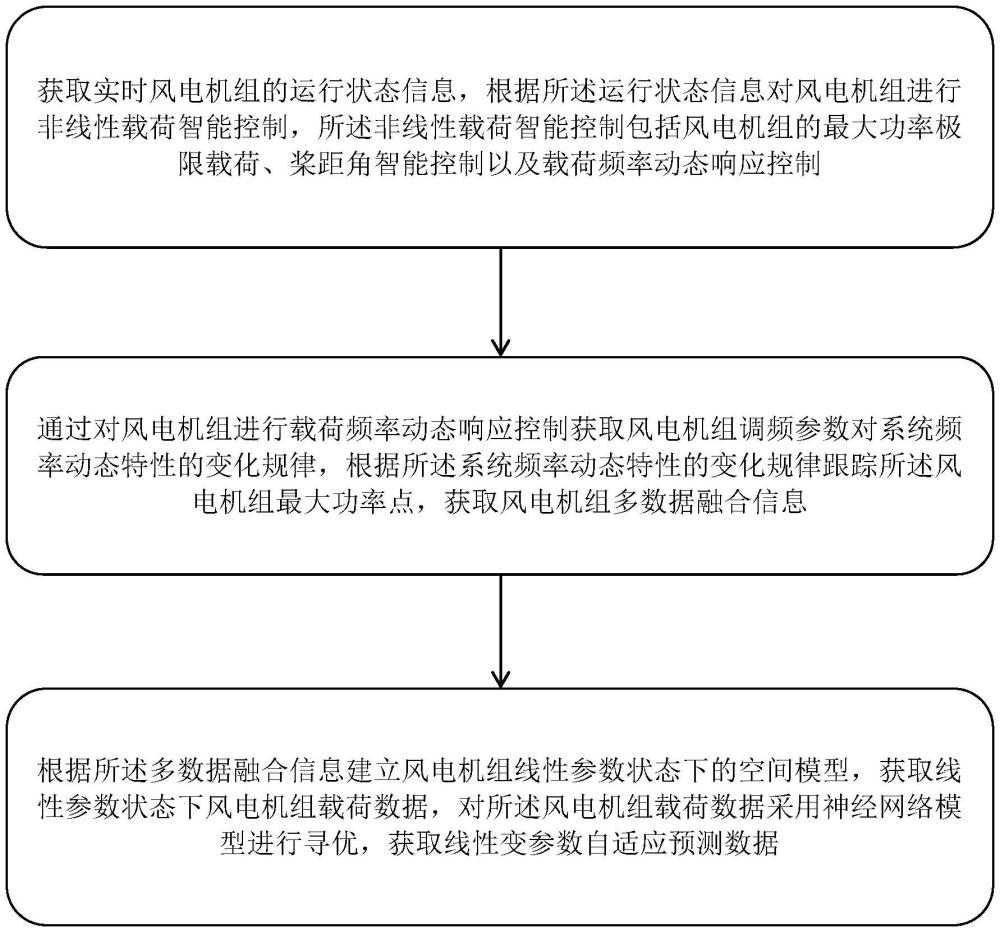
4、获取实时风电机组的运行状态信息,根据所述运行状态信息对风电机组进行非线性载荷智能控制,所述非线性载荷智能控制包括风电机组的最大功率极限载荷、桨距角智能控制以及载荷频率动态响应控制;
5、通过对风电机组进行载荷频率动态响应控制获取风电机组调频参数对系统频率动态特性的变化规律,根据所述系统频率动态特性的变化规律跟踪所述风电机组最大功率点,获取风电机组多数据融合信息;
6、根据所述多数据融合信息建立风电机组线性参数状态下的空间模型,获取线性参数状态下风电机组载荷数据,对所述风电机组载荷数据采用神经网络模型进行寻优,获取线性变参数自适应预测数据。
7、作为本发明的一种优选方案,所述运行状态信息包括动力控制数据、最大功率跟踪信息以及硬件状态信息,所述动力控制数据包括风况、风电响应数据、功率环控制数据;所述最大功率跟踪信息包括桨距角数据、额定功率、最大功率载荷;所述硬件状态信息风电载荷受力极限、疲劳载荷以及系统状态参数。
8、作为本发明的一种优选方案,所述风电响应数据通过控制输入代价函数限制载荷输入量,所述控制输入代价函数表达式为:
9、j(u(k))=|y*(k+1)/y(k+1)|2+γ|u(k)2-u(k-1)|2
10、其中,u(k)表示当前时刻k的输入响应数据,y(k+1)表示k+1时刻控制响应信号,u(k-1)表示k-1时刻的输入响应数据,y*(k+1)表示k+1时刻期望的响应输出信号,k表示控制输入代价函数中的时刻值;
11、根据所述响应输出信号采用pi控制器将风电机组功率环路控制在0-10hz之间,对所述功率环控制数据进行调频控制引入状态方程,获取额定功率p1,所述状态方程表达式为:
12、
13、其中,tf表示状态方程中处理功率环控制数据的延时时间,fpl表示锁相测量所得到的系统频率,表示锁相测量所得到的初始频率,f0表示频率测量的延时频率,t表示时间,kf表示调频控制系数。
14、作为本发明的一种优选方案,根据所述额定功率p1采用pi控制器对风电机组进行变桨控制,当风电机组达到额定功率运行状态后,将风电机组的电磁转矩设置为额定转矩,当前时刻所述pi控制器的参考转速设置为发电机额定转速,通过调整桨距角数据,将所述风电机组稳定在额定功率状态下运转。
15、作为本发明的一种优选方案,所述风电机组在额定功率运行状态下,根据所述运行状态信息对风电机组进行非线性载荷智能控制,获取载荷频率动态响应控制规律,包括:
16、在额定功率状态下,将风电机组的状态空间分为最大功率极限载荷、桨距角调整两个控制区域,分别设定控制变量为可行的最大值和最小值,通过分析风电机组的虚拟惯性系数,制定边界条件控制两个区域间的切换,在两个区域不断转换的过程中达到最优控制,获取载荷频率随时间的动态响应控制曲线。
17、作为本发明的一种优选方案,通过对风电机组进行载荷频率动态响应控制获取风电机组调频参数对系统频率动态特性的变化规律,包括:
18、在所述动态响应控制曲线上截取最大功率点a、b,通过锁相环得到频率变化率并取其绝对值f2,对所述f2采用低通滤波后与阈值n比较,根据所述a、b两点间的频率变化调整风电机组的虚拟惯性系数;
19、通过频率变化率和频率变化量的正负控制载荷频率,在不同频率响应区间选择不同的风电机组调频参数。
20、作为本发明的一种优选方案,根据所述系统频率动态特性的变化规律跟踪所述风电机组最大功率点,获取风电机组多数据融合信息,包括:
21、在所述系统频率动态特性的变化规律下,获取风电机组发电机转速、桨距角以及电磁转矩状态,判断所述风电机组是否达到额定状态;
22、将所述桨距角小于最小桨距角、发电机转速小于额定转速时,将所述风电机组切换为额定功率以下运行状态;
23、当电磁转矩大于额定电磁转矩、发电机转速大于额定转速时,将所述风电机组切换为额定功率以上运行状态;
24、在所述风电机组处于额定功率以下运行状态时,保持最优桨距角,通过改变电磁转矩优化发电机转速,进而跟踪发电机组最大功率点,获取多数据融合信息;
25、在所述风电机组处于额定功率以上运行状态时,保持额定转矩,通过控制桨距角,使发电机转速稳定在额定发电机转速,进而跟踪发电机组最大功率点,获取多数据融合信息。
26、作为本发明的一种优选方案,根据所述多数据融合信息建立风电机组线性参数状态下的空间模型,获取线性参数状态下风电机组载荷数据,包括:
27、对所述多数据融合信息通过所述控制输入代价函数求解最优的系统输入值,分别设置电机转速、电磁转矩以及桨距角的权重系数调整pi控制器性能,获取线性参数状态下风电机组载荷数据。
28、作为本发明的一种优选方案,对所述风电机组载荷数据采用神经网络模型进行寻优,获取线性变参数自适应预测数据,包括:
29、根据所述运行状态信息对风电机组风能基于卡尔曼滤波器进行有效风速估计,获取有效风速;
30、将所述有效风速参考所述风电机组处于额定功率以上运行状态时,跟踪发电机组最大功率点,获取多数据融合信息,并根据所述有效风速通过风速自适应机制在每一个控制间隔为pi控制器更新预测模型;
31、实时反馈校正所述风电机组载荷数据,求解在多目标约束下的最优控制量,并对载荷数据进行自适应优化,实现风电机组的功率控制。
32、本发明与现有技术相比较具有如下有益效果:
33、本发明利用风电机组控制策略对转矩控制回路和变桨控制回路实时控制,优化风能转速,再通过调整桨距角,改变风轮转速,调节风能转化效率,稳定输出功率,实时跟踪最大功率点,获取反馈消息,对控制模型进行修正和调整,以实现更加精确的控制,提高了自适应预测模型的准确性。
34、采用多目标优化控制策略,实现了惯量参数的精确控制、频率的最小偏差和扰动后的快速稳定,可以提髙系统鲁棒性和稳定性,根据不同风速对应的平衡点处线性化风电机组模型,用线性插值法求得每两个平衡点之间的预测模型,得到风电机组运行区间内的自适应预测模型,根据输入的有效风速,在控制间隔更新预测模型,形成风速自适应机制,解决了模型失配问题。
- 还没有人留言评论。精彩留言会获得点赞!