一种基于风演化建模的前馈统一变桨控制方法及装置与流程
本发明涉及风力发电机组变桨控制,具体涉及一种基于风演化建模的前馈统一变桨控制方法及装置。
背景技术:
1、风力发电系统的容量已经发展为兆瓦级,其运行环境也愈发复杂,实际应用中,变速变桨风电机组常采用转速反馈控制以控制气动扭矩和电磁扭矩的平衡以稳定转速,具体为在不同风速区通过调节电磁转矩或桨距角来稳定风轮转速。
2、但是,上述风电机组的变桨控制方法忽视了实际空间中风演化的过程,由于实际风速会受到地理、环境和风机尾流等因素的影响,直接导致控制信号的准确性下降,进而导致风机在风速较高且变化幅度较大的风况下极易出现过速停机,部件载荷增大,不利于延长风电机组寿命。
技术实现思路
1、有鉴于此,本发明提供了一种基于风演化建模的前馈统一变桨控制方法及装置,以解决风电机组的变桨控制方法忽视了实际空间中风演化的过程,导致控制信号的准确性下降的问题。
2、第一方面,本发明提供了一种基于风演化建模的前馈统一变桨控制方法,该方法包括:
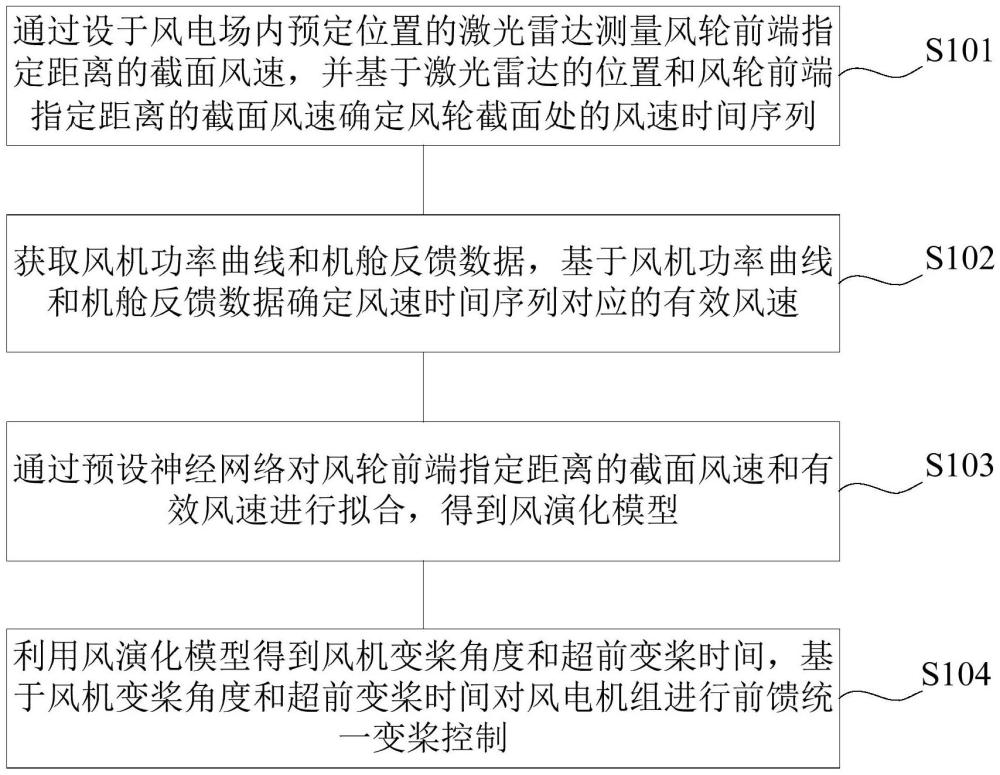
3、通过设于风电场内预定位置的激光雷达测量风轮前端指定距离的截面风速,并基于激光雷达的位置和风轮前端指定距离的截面风速确定风轮截面处的风速时间序列;
4、获取风机功率曲线和机舱反馈数据,基于风机功率曲线和机舱反馈数据确定风速时间序列对应的有效风速;
5、通过预设神经网络对风轮前端指定距离的截面风速和有效风速进行拟合,得到风演化模型;
6、利用风演化模型得到风机变桨角度和超前变桨时间,基于风机变桨角度和超前变桨时间对风电机组进行前馈统一变桨控制。
7、本实施例提供的一种基于风演化建模的前馈统一变桨控制方法,通过激光雷达测量风轮前端指定距离的截面风速,基于风机功率曲线和机舱反馈数据确定风速时间序列对应的有效风速,避免了尾流效应的影响导致机舱风速计测风不准的问题,通过预设神经网络对风轮前端指定距离的截面风速和有效风速进行拟合,使得风演化模型能够更加准确地对实际空间中风演化过程进行拟合,并且,利用风演化模型得到风机变桨角度和超前变桨时间,基于风机变桨角度和超前变桨时间对风电机组进行前馈统一变桨控制,优化了对风机变桨的控制效果,对不同地理环境具有普适性,使前馈变桨控制器的指令值更准确,避免极端风况下风机失速停机,减小了风机部件载荷,延长了风机寿命。
8、在一种可选的实施方式中,基于风机功率曲线和机舱反馈数据确定风速时间序列对应的有效风速,包括:
9、基于机舱反馈数据确定风速时间序列对应的风机转速、风机功率和风机桨距角;
10、获取风轮半径,基于风机转速、风机功率、风机桨距角和风轮半径,对照风机功率曲线得到叶尖速比;
11、基于叶尖速比、风机转速和风轮半径计算风速时间序列对应的有效风速。
12、本实施例提供的一种基于风演化建模的前馈统一变桨控制方法,利用风机功率曲线,结合机舱反馈数据,反推出风轮截面处的有效风速,避免了尾流效应的影响导致机舱风速计测风不准的问题,为后续前馈统一变桨的准确控制奠定了基础。
13、在一种可选的实施方式中,通过预设神经网络对风轮前端指定距离的截面风速和有效风速进行拟合,得到风演化模型,包括:
14、对风轮前端指定距离的截面风速和有效风速进行归一化处理;
15、将归一化处理后的风轮前端指定距离的截面风速输入预设神经网络,生成风轮处预测风速;
16、基于风轮处预测风速和有效风速拟合计算损失函数,并基于损失函数对预设神经网络进行迭代训练,得到风演化模型。
17、本实施例提供的一种基于风演化建模的前馈统一变桨控制方法,对风轮前端指定距离的截面风速和有效风速进行归一化处理,避免了异常数据带来不良影响,并提高算法收敛速度以及预设神经网络的预测精度,通过预设神经网络对激光雷达测量的风轮前端指定距离的截面风速和反推得到的有效风速进行拟合,可更准确的拟合出水平轴风速的演化过程,提高风演化模型的预测精度。
18、在一种可选的实施方式中,利用风演化模型得到风机变桨角度和超前变桨时间,基于风机变桨角度和超前变桨时间对风电机组进行前馈统一变桨控制,包括:
19、通过设于风电场内预定位置的激光雷达测量目标风机的实时风速,并将实时风速输入风演化模型中,得到当前风轮处风速;
20、采集目标风机参数,对当前风轮处风速和目标风机参数进行变桨控制计算,得到风机变桨角度;
21、获取风机变桨执行机构的动态时间和激光雷达的采样时间,基于风机变桨执行机构的动态时间和激光雷达的采样时间确定超前变桨时间;
22、利用风机变桨角度和超前变桨时间对目标风机进行前馈统一变桨控制。
23、本实施例提供的一种基于风演化建模的前馈统一变桨控制方法,利用训练好的风演化模型,结合激光雷达测风设计和前馈变桨控制器,可得到准确叠加的风机变桨角度以及更加精确的超前变桨时间,优化了对风机变桨的控制效果,降低了塔架载荷和输出功率的波动,延长了风机寿命。
24、在一种可选的实施方式中,对当前风轮处风速和目标风机参数进行变桨控制计算,得到风机变桨角度,包括:
25、利用查表法确定当前风轮处风速对应的桨距角;
26、获取目标风机的当前桨距角,基于当前风轮处风速对应的桨距角和当前桨距角计算前馈叠加桨距角;
27、获取目标风机的风轮转速和目标风机额定转速,基于目标风机的风轮转速和风机额定转速计算桨距角度数;
28、将桨距角度数和前馈叠加桨距角进行叠加计算,得到风机变桨角度。
29、本实施例提供的一种基于风演化建模的前馈统一变桨控制方法,通过查表法实现了对当前风轮处风速对应的桨距角的快速且准确的获取,并且基于当前风轮处风速对应的桨距角和当前桨距角计算前馈叠加桨距角,基于目标风机的风轮转速和风机额定转速计算桨距角度数,将桨距角度数和前馈叠加桨距角进行叠加计算,在风演化模型对当前风轮处风速预测的基础上,结合变桨控制器对目标风机的相关参数的处理,实现了桨距角的准确叠加计算,优化了对风机的前馈统一变桨控制。
30、在一种可选的实施方式中,基于目标风机的风轮转速和风机额定转速计算桨距角度数,包括:
31、基于目标风机的风轮转速和风机额定转速确定转速误差信号,并基于转速误差信号进行变桨控制,得到桨距角度数。
32、第二方面,本发明提供了一种基于风演化建模的前馈统一变桨控制装置,该装置包括:
33、测量模块,用于通过设于风电场内预定位置的激光雷达测量风轮前端指定距离的截面风速,并基于激光雷达的位置和风轮前端指定距离的截面风速确定风轮截面处的风速时间序列;
34、确定模块,用于获取风机功率曲线和机舱反馈数据,基于风机功率曲线和机舱反馈数据确定风速时间序列对应的有效风速;
35、拟合模块,用于通过预设神经网络对风轮前端指定距离的截面风速和有效风速进行拟合,得到风演化模型;
36、控制模块,用于利用风演化模型得到风机变桨角度和超前变桨时间,基于风机变桨角度和超前变桨时间对风电机组进行前馈统一变桨控制。
37、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的基于风演化建模的前馈统一变桨控制方法。
38、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的基于风演化建模的前馈统一变桨控制方法。
39、第五方面,本发明提供了一种计算机程序产品,包括计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的基于风演化建模的前馈统一变桨控制方法。
- 还没有人留言评论。精彩留言会获得点赞!