一种基于航空发动机稳定裕度估计的主动稳定性控制系统
本发明涉及航空发动机控制,更具体地说,涉及一种基于航空发动机稳定裕度估计的主动稳定性控制系统。
背景技术:
1、当前航空发动机气动稳定性控制主要采用的是被动控制方法,其控制策略建立在失稳控制线的基础上,结合短时增稳控制系统与失稳复原控制系统来解决发动机的不稳定工作问题;然而,这种传统的失稳控制策略存在诸多缺陷,如失稳控制线保守的稳定裕度、短时增稳控制系统的开环性及失稳复原控制系统的事后性等,限制了发动机性能的提升。
2、参考公开号为cn109344510a的专利申请公开了基于航空发动机稳定裕度估计的主动稳定性控制方法,所述方法包括:(1)航空发动机喘振实时模型;(2)喘振裕度估计算法与模拟;(3)航空发动机主动稳定性控制律;本发明针对航空发动机气动稳定性问题,通过利用剩余稳定裕度提高发动机气动稳定性,建立发动机喘振实时模型以及建立发动机稳定裕度估计模型,通过鲁棒控制方法设计主动稳定性控制律,构建发动机稳定裕度闭环控制回路,保证发动机在过渡态稳定工作前提下,最大限度发挥剩余稳定性裕度带来的动态性能;此外,本方案可使发动机在加速过程中在喘振裕度较小的高性能点工作,改善发动机的加速性能,增强飞机的机动性;
3、但是,上述参考专利通过剩余稳定裕度和鲁棒控制优化发动机稳定性,构建闭环控制以确保过渡态稳定并提升动态性能,使发动机在加速时于高性能点工作,从而增强飞机的加速性能和机动性,但无法对喘振风险进行精确评估,不能通过实时监测和动态调整预防喘振现象,无法精确评估发动机失速风险,不能实现实时监测与预警,不能保障发动机安全运行,同时无法对发动机运行状态进行精准评估,不能根据发动机运行风险合理调整发动机状态。
4、为此,我们针对上述问题提出一种基于航空发动机稳定裕度估计的主动稳定性控制系统。
技术实现思路
1、本发明的目的在于提供一种基于航空发动机稳定裕度估计的主动稳定性控制系统,解决了现有技术无法对喘振风险进行精确评估,不能通过实时监测和动态调整预防喘振现象,无法精确评估发动机失速风险,不能实现实时监测与预警,不能保障发动机安全运行,同时无法对发动机运行状态进行精准评估,不能根据发动机运行风险合理调整发动机状态的问题。
2、本发明的目的通过以下技术方案实现:
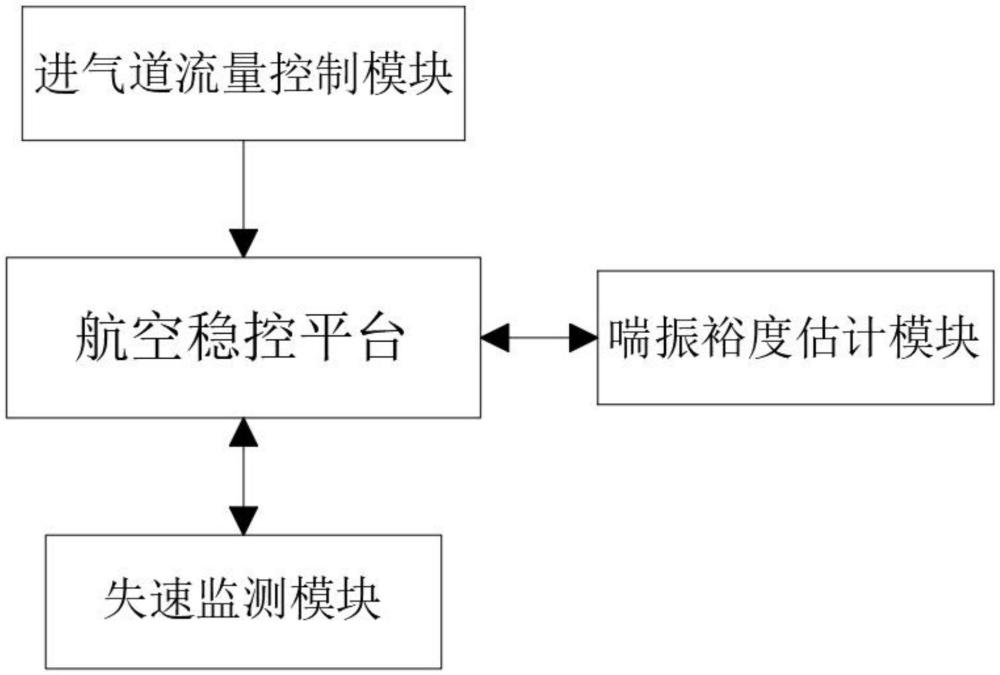
3、一种基于航空发动机稳定裕度估计的主动稳定性控制系统,包括航空稳控平台、进气道流量控制模块、喘振裕度估计模块、失速监测模块、控制器决策模块以及保护执行模块;
4、进气道流量控制模块,用于实时收集进气道流量、发动机流量以及飞行攻角,计算出最优斜板角度,并根据计算结果得到斜板调整角度值;
5、喘振裕度估计模块,用于收集历史喘振裕度估计参数,构建喘振裕度估计模型,根据模型计算出实时喘振裕度估计值;
6、失速监测模块,用于实时监测发动机工作参数和飞行状态参数,对发动机失速风险进行监测评估;
7、控制器决策模块,用于根据斜板调整角度值、实时喘振裕度估计值以及失速风险评估结果对发动机运行状态进行综合评估,并根据评估结果做出控制决策;
8、保护执行模块,用于根据控制决策控制相应执行机构执行控制措施。
9、作为本发明的一种优选实施方式,所述进气道流量控制模块计算最优斜板角度的具体过程如下:
10、通过传感器实时收集进气道流量、发动机流量、飞行攻角以及当前斜板角度,进气道流量是指进入进气道的空气流量,将进气道流量标记为qj,发动机流量是指发动机所需的空气流量,将发动机流量标记为qf,飞行攻角是指飞行器相对于气流的迎角,将飞行攻角标记为β,斜板角度是指进气道斜板与进气道轴线的夹角,将当前斜板角度标记为θ;
11、为了确保发动机正常工作,进气道流量必须满足或略大于发动机的需求,即:qj≥qf;
12、飞行攻角的变化会直接影响进气道的气流分布和流量,飞行攻角和进气道流量之间的关系表达式如下:
13、qj(β)=qj0·f(β);
14、其中qj0是零飞行攻角时的进气道流量,f(β)是一个与飞行攻角相关的函数;
15、调整斜板角度会改变进气道的气流分布,进而影响进气道流量,斜板角度与进气道流量之间的关系表达式如下:
16、qj(θ)=qj0·g(θ);
17、其中qj0是零斜板角度时的进气道流量,g(θ)是一个与斜板角度相关的函数。
18、作为本发明的一种优选实施方式,为了确保进气道流量满足发动机的需求,综合考虑飞行攻角和斜板角度的影响,进气道流量与发动机流量之间的关系表达式如下:
19、qj(θ,β)=qf;
20、将飞行攻角、斜板角度与进气流量之间的关系表达式带入得到:
21、qj0·f(β)·g(θ)=qf;
22、通过解这个方程,得到最优斜板角度θ*:
23、
24、其中g-1是函数g(θ)的反函数;
25、通过以下公式得到斜板调整角度值θt:θt=θ*-θ;
26、将计算得到的斜板调整角度值θt发送给航空稳控平台。
27、作为本发明的一种优选实施方式,所述喘振裕度估计模块构建喘振裕度估计模型的具体过程如下:
28、获取到历史喘振裕度估计参数,喘振裕度估计参数包括飞行攻角、压气机流量系数、发动机转速以及压气机进口总压,生成收集周期,将收集周期s划分为多个收集时段{s1,s2,…,sn},即s={s1,s2,…,sn};
29、获取飞行器在多个收集时段内的飞行攻角,以此构建飞行攻角的集合a,并将集合a中的最大子集和最小子集之间差值的均值记为飞行攻角差值fgc;
30、获取飞行器在多个收集时段内的压气机流量系数,压气机流量系数表示单位时间内通过压气机某一截面的空气质量流量与该截面面积和当地声速的无量纲比值,以此构建压气机流量系数的集合b,并将集合b中的最大子集和最小子集之间差值的均值记为压气机流量系数差值ylc;
31、获取飞行器在多个收集时段内的发动机转速,发动机转速表示发动机的曲轴或主轴在一分钟内完成的完整旋转圈数,以此构建发动机转速的集合c,并将集合c中的最大子集和最小子集之间差值的均值记为发动机转速差值fzc;
32、获取飞行器在多个收集时段内的压气机进口总压,压气机进口总压表示进入压气机之前的气体总压力,以此构建压气机进口总压的集合d,并将集合d中的最大子集和最小子集之间差值的均值记为压气机进口总压差值yyc。
33、作为本发明的一种优选实施方式,获取到飞行攻角差值fgc、压气机流量系数差值ylc、发动机转速差值fzc以及压气机进口总压差值yyc,将飞行攻角差值fgc、压气机流量系数差值ylc、发动机转速差值fzc以及压气机进口总压差值yyc构建特征矩阵tj,将特征矩阵tj作为机器学习模型的输入,并将每组特征矩阵tj对应的喘振裕度作为机器学习模型的输出,以喘振裕度为估计目标,以最小所有训练数据的估计误差之和作为训练目标,对机器学习模型进行训练,直至估计误差之和达到收敛时停止训练,得到喘振裕度估计模型,喘振裕度估计模型表示公式如下:
34、cy=γ0+γ1·fgj+γ2·ylj+γ3·fzj+γ4·yyj;
35、其中cy为喘振裕度估计值,γ0、γ1、γ2、γ3以及γ4均为回归系数;
36、获取到实时喘振裕度估计参数,将其转换成对应的特征矩阵输入喘振裕度估计模型中,通过喘振裕度估计模型计算出实时喘振裕度估计值cy实时,将计算得到的实时喘振裕度估计值cy实时发送给航空稳控平台。
37、作为本发明的一种优选实施方式,所述失速监测模块对发动机失速风险进行监测评估的具体过程如下:
38、获取历史发动机工作参数和历史飞行状态参数,发动机工作参数包括发动机转速、压气机进口总压,飞行状态参数包括飞行速度、飞行攻角以及飞行侧滑角,生成监测周期,将监测周期等分为g个连续的子周期,并标记出每一个子周期的中点时刻,获得g个中点时刻;
39、以g个中点时刻为基点,分别向前和向后等时长扩展,标记出h-1个扩展时刻,并将中点时刻和h-1个扩展时刻汇总后,获得h个检测时刻;
40、通过传感器分别测量在h个检测时刻的发动机转速值,获得h个检测发动机转速值,并将h个检测发动机转速值累加后求平均,获得g个子发动机转速值;
41、子发动机转速值的表达式为:
42、式中,fzzg为第g个子周期的子发动机转速值,fzjcgn为第g个子周期的第n个检测发动机转速值;
43、去掉子发动机转速值的最大值和最小值,将余下的g-2个子发动机转速值累加后求平均,获得发动机转速均值;
44、发动机转速均值的表达式为:
45、式中,fzjz为发动机转速均值,fzzo为第o个子周期的子发动机转速值。
46、作为本发明的一种优选实施方式,使用计算出发动机转速均值的方法同理可得到压气机进口总压均值yyjy、飞行速度均值fsjs、飞行攻角均值fgjg以及飞行侧滑角均值fhjh,将发动机转速均值fzjz、压气机进口总压均值yyjy、飞行速度均值fsjs、飞行攻角均值fgjg以及飞行侧滑角均值fhjh组合构建风险评定特征矩阵fp;
47、将构建的风险评定特征矩阵fp作为逻辑回归模型的输入,并将标签向量v作为逻辑回归模型的输出,标签向量v表示发动机是否存在失速风险,标签向量v的输出分别为0或1,0表示发动机不存在失速风险,1表示发动机存在失速风险,以标签向量v为预测目标,以最小化所有训练数据的预测误差之和作为训练目标,对逻辑回归模型进行训练,直至预测误差之和达到收敛时停止训练,得到预测出标签向量v的逻辑回归模型。
48、作为本发明的一种优选实施方式,逻辑回归模型的表达公式为:
49、
50、其中p(v=1)表示发动机发生失速的概率值,μ0表示截距项,表示发动机发生失速的基准概率,μ0、μ1、μ2、μ3、μ4以及μ5均为回归系数;
51、获取到实时发动机工作参数和实时飞行状态参数,对其进行处理后构建风险评定特征矩阵fp实时,通过训练好的逻辑回归模型计算发动机发生失速的概率值p实时,将计算得到的发动机发生失速的概率值p实时发送给航空稳控平台。
52、作为本发明的一种优选实施方式,所述控制器决策模块对发动机运行状态进行综合评估的具体过程如下:
53、获取到斜板调整角度值θt、实时喘振裕度估计值cy实时以及发动机发生失速的概率值p实时,通过以下公式计算运行状态评定系数yzp:
54、
55、其中b1、b2以及b3均为预设比例因子系数,b3>b2>b1>0,将运行状态评定系数yzp与预设第一运行状态评定系数阈值和预设第二运行状态评定系数阈值进行比较,预设第一运行状态评定系数阈值小于预设第二运行状态评定系数阈值;
56、若运行状态评定系数小于预设第一运行状态评定系数阈值,则表明发动机运行处于低风险状态;
57、若运行状态评定系数大于等于预设第一运行状态评定系数阈值,且运行状态评定系数小于预设第二运行状态评定系数阈值,则表明发动机运行处于中等风险状态;
58、若运行状态评定系数大于等于预设第二运行状态评定系数阈值,则表明发动机运行处于高风险状态;
59、根据对发动机运行状态的评估结果做出相应控制决策,并将控制决策发送给保护执行模块。
60、作为本发明的一种优选实施方式,所述保护执行模块执行相应控制措施的具体过程如下:
61、保护执行模块在接收到控制决策后立即发送控制指令给相应执行机构,执行机构根据控制指令执行相应控制措施,控制措施的具体内容如下:
62、若控制决策为保持当前状态,则无需调整斜板角度、发动机转速或飞行姿态;
63、若控制决策为进行轻微调整,则适当增加或减小斜板角度,优化进气条件,适当增加或减小发动机转速,优化压气机工作状态,适当调整飞行攻角和侧滑角,改善进气道工作条件;
64、若控制决策为进行紧急调整,则大幅增加斜板角度,增加进气流量,改善压气机工作状态,大幅增加发动机转速,提高压气机流量,避免进入失速区域,大幅调整飞行攻角和侧滑角,改善进气道工作条件,降低失速风险。
65、相比于现有技术,本发明的优点在于:
66、(1)本发明中,通过喘振裕度估计模块能够对喘振风险进行精确评估,通过实时监测和动态调整有效预防了喘振现象,确保了发动机的安全运行,该系统允许更接近性能极限的安全操作,从而优化了工作效率和性能表现,具备自适应能力的模块能够根据飞行条件自动调整,增强了飞机在多变环境中的适应性,同时,系统利用历史与实时数据进行智能决策,保证了快速响应和高可靠性;
67、(2)本发明中,通过失速监测模块精确评估发动机失速风险,显著提升了预测准确性,实现了实时监测与预警,有效预防安全隐患,保障发动机安全运行,基于准确的风险评估,该模块能够安全调整发动机工作状态,优化性能,系统具备自适应能力,根据不同飞行条件自动调整评估策略,增强飞机的环境适应性,利用历史和实时数据决策,确保快速响应和高可靠性;
68、(3)本发明中,通过控制器决策模块对多种参数进行综合评估,能够全面识别并迅速响应发动机运行风险,提升飞行安全,基于精准评估,模块合理调整发动机状态,确保安全的同时优化性能,系统根据风险等级自动决策,增强应对灵活性,并利用多源数据进行可靠评估,提升运营效率,设定风险阈值实现精细化管理,保障各风险级别下的最优响应,确保系统稳定性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!