一种智能快速电极去极化设备的制作方法
1.本发明涉及一种电极去极化设备,尤其涉及一种智能快速电极去极化设备。
背景技术:
2.脑电图等电极用于采集脑电信号,通常由导电性能良好的金属材料制成,但金属材料在有直流电流持续通过时,由于电化学反应而在金属电极表面产生电荷积聚,造成时间和频率依赖性的电阻增加,电极表面因为存在电荷和极性而产生直流电效应,经放大后产生大幅度的基线缓慢漂移伪差,故这种有极性的金属材料不能用于采集脑电信号,因为银没有明显的极化现象而通常被用作脑电图的电极材料,但随使用时间增长,银的极化现象增强,也会影响脑电图等信号采集的质量。
3.传统的电极去极化方式,是通过检测人员将电极放入器皿中,随后检测人员用物体对电极进行固定,接着检测人员将加热设备放在器皿下方,加热设备对电极进行加热,在电极加热的过程中,需要检测人员拿着搅拌棒对电解液进行搅拌,从而提高电解液的反应速率,在此过程中,检测人员无法控制电解液的温度,从而影响电解液的反应速率,并且检测人员手动搅拌电解液不仅增加检测人员的工作时间,同时还加快了体能的消耗。
4.为此,我们设计了一种实现电极去极化、自动加热电解液和自动搅拌电解液的智能快速电极去极化设备。
技术实现要素:
5.为了克服传统电极去极化设备无法实现电极去极化、无法自动加热电解液和无法自动搅拌电解液的缺点,本发明提供一种实现电极去极化、自动加热电解液和自动搅拌电解液的智能快速电极去极化设备。
6.本发明是这样实现的,一种智能快速电极去极化设备,包括:基座、废液箱、第一支撑架、反应箱、第二支撑架、第一固定块、碳棒、承料箱、支撑板、下料机构、下压机构、升温机构和接触机构,基座上设有用来收集电解液的废液箱,废液箱上部设有第一支撑架,第一支撑架上部设有用来存放电解液的反应箱,反应箱上侧设有第二支撑架,废液箱上部中间设有第一固定块,反应箱上部设有用来对电极去极化的碳棒,第一固定块上部与反应箱底部之间设有下料机构,反应箱与第二支撑架之间设有下压机构,下压机构上设有用来对电解液进行承载的承料箱,承料箱内侧下部滑动式设有支撑板,反应箱上设有升温机构,第二支撑架内侧上部设有接触机构。
7.作为优选,下料机构包括:第一固定块上部中间滑动式设有拉杆,反应箱底部两侧均设有导向块,两个导向块之间滑动式连接有下料板,下料板与拉杆连接,拉杆上绕有第一弹簧,第一弹簧两端分别与第一固定块和下料板连接。
8.作为优选,下压机构包括:反应箱内壁上侧设有多根第一伸缩杆,第一伸缩杆与承料箱连接,多根第一伸缩杆上均绕有第二弹簧,第二弹簧两端分别与第一伸缩杆和承料箱连接,第二支撑架内壁上侧安装有电动推杆,电动推杆的伸缩杆底端设有连接块,第一固定
块中间设有接触开关。
9.作为优选,升温机构包括:第二支撑架内壁上侧设有距离传感器,反应箱外侧设有多个第二固定块,多个第二固定块之间连接有用来对电解液进行加热的发热模组,反应箱内壁下部设有温度传感器。
10.作为优选,接触机构包括:第二支撑架内壁上部两侧均设有第二伸缩杆,两根第二伸缩杆之间连接有用来固定电极的压板,两根第二伸缩杆上均绕有第三弹簧,第三弹簧两端分别与第二支撑架和压板连接,第二支撑架内壁上部中间设有第三支撑架,第三支撑架上安装有第一减速电机,第一减速电机输出轴上设有第一转轴,第一转轴上设有绕线轮,绕线轮与压板之间连接有拉绳。
11.作为优选,还包括有搅拌机构,搅拌机构包括:第二支撑架内壁上部中间设有第三伸缩杆,压板中间设有压力传感器,压力传感器与第三伸缩杆连接,第三伸缩杆上绕有第四弹簧,第四弹簧两端分别与第二支撑架和压板连接,废液箱顶部中间安装有第二减速电机,第二减速电机输出轴上侧设有第二转轴,第二转轴与反应箱转动式连接,第二转轴上侧设有搅拌叶。
12.作为优选,还包括有上升机构,上升机构包括:承料箱上部中间设有第三固定块,第三固定块上滑动式设有滑杆,滑杆与支撑板连接,滑杆下侧绕有第五弹簧,第五弹簧两端分别与滑杆和第三固定块连接。
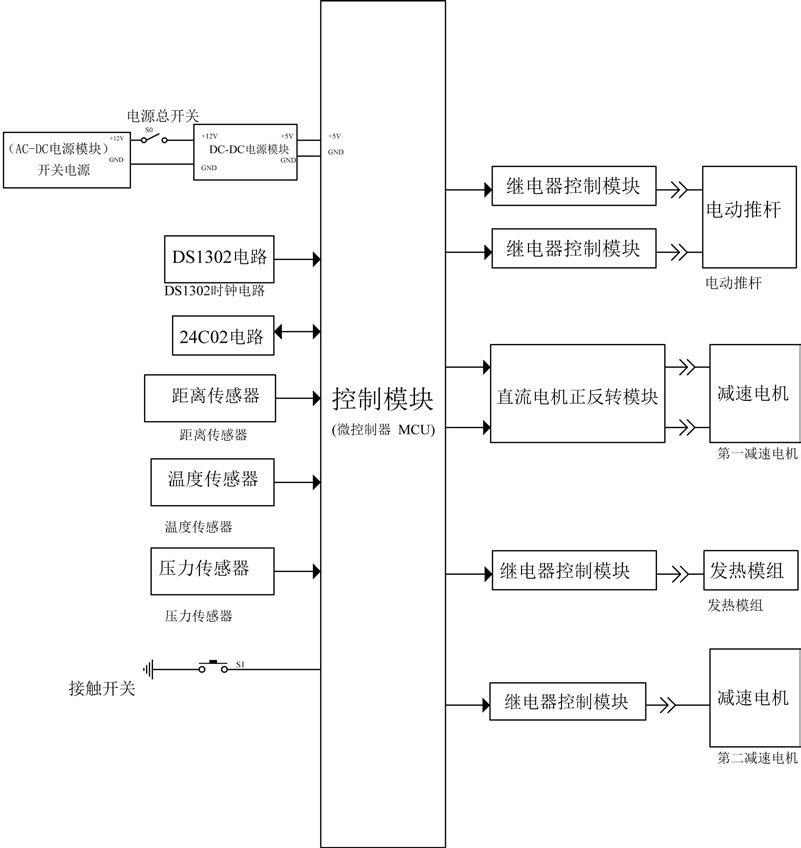
13.作为优选,还包括有控制箱,第一固定块上部安装有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为智能快速电极去极化设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关、距离传感器、温度传感器和压力传感器均与控制模块通过电性连接,电动推杆、发热模组和第二减速电机均与控制模块通过继电器控制模块连接,第一减速电机与控制模块通过直流电机正反转模块连接。
14.本发明提供了一种智能快速电极去极化设备,具备以下有益效果:1、本发明通过控制模块控制发热模组工作,发热模组散发出的热量对电解液进行加热,从而增强电解液的反应效率,实现发热模组加热电解液效果;2、当连接块向下运动到与承料箱接触后,从而带动承料箱、支撑板和电极向下运动,第一伸缩杆向下收缩,第二弹簧被压缩,使得承料箱对电极进行向下运送,从而节省使用者搬运电极的工作步骤,实现自动运送电极效果;3、本发明通过第二减速电机输出轴带动第二转轴和搅拌叶转动,搅拌叶对反应箱中的电解液进行搅拌,从而提高电解液的反应效率,实现搅拌叶搅拌电解液效果;4、当压板向下运动到与支撑板上的电极接触后,压板对电极进行固定,防止电极发生位置偏移,实现压板固定电极效果。
附图说明
15.图1为本发明的第一视角立体结构示意图。
16.图2为本发明的第二视角立体结构示意图。
17.图3为本发明的第三视角立体结构示意图。
18.图4为本发明的第四视角立体结构示意图。
19.图5为本发明的下料机构第一部分立体结构示意图。
20.图6为本发明的下料机构第二部分立体结构示意图。
21.图7为本发明的a处放大图。
22.图8为本发明的下压机构剖面立体结构示意图。
23.图9为本发明的升温机构第一部分立体结构示意图。
24.图10为本发明的升温机构第二部分立体结构示意图。
25.图11为本发明的接触机构第一部分立体结构示意图。
26.图12为本发明的接触机构第二部分立体结构示意图。
27.图13为本发明的b处放大图。
28.图14为本发明的搅拌机构第一部分立体结构示意图。
29.图15为本发明的c处放大图。
30.图16为本发明的搅拌机构第二部分立体结构示意图。
31.图17为本发明的上升机构立体结构示意图。
32.图18为本发明的d处放大图。
33.图19为本发明的电路框图。
34.图20为本发明的电路原理图。
35.附图标号:1_基座,2_废液箱,3_第一支撑架,4_反应箱,5_第二支撑架,6_第一固定块,7_控制箱,8_碳棒,9_承料箱,10_支撑板,11_下料机构,111_拉杆,112_导向块,113_下料板,114_第一弹簧,12_下压机构,121_第一伸缩杆,122_第二弹簧,123_电动推杆,124_连接块,125_接触开关,13_升温机构,131_距离传感器,132_发热模组,133_第二固定块,134_温度传感器,14_接触机构,141_第二伸缩杆,142_第三弹簧,143_压板,144_拉绳,145_第三支撑架,146_第一减速电机,147_第一转轴,148_绕线轮,15_搅拌机构,151_第三伸缩杆,152_第四弹簧,153_压力传感器,154_第二减速电机,155_第二转轴,156_搅拌叶,16_上升机构,161_滑杆,162_第五弹簧,163_第三固定块。
具体实施方式
36.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
37.请参阅图1-图20,本发明提供一种技术方案:一种智能快速电极去极化设备,包括有基座1、废液箱2、第一支撑架3、反应箱4、第二支撑架5、第一固定块6、碳棒8、承料箱9、支撑板10、下料机构11、下压机构12、升温机构13和接触机构14,基座1上焊接有废液箱2,废液箱2上部焊接有第一支撑架3,第一支撑架3上部设有反应箱4,反应箱4下部开有凹槽,反应箱4上侧焊接有第二支撑架5,废液箱2前侧上部焊接有第一固定块6,反应箱4后侧上部安装有碳棒8,第一固定块6前侧上部与反应箱4底部之间设有下料机构11,反应箱4与第二支撑架5之间设有下压机构12,反应箱4上设有升温机构13,下压机构12上设有承料箱9,承料箱9内侧下部滑动式设有支撑板10,第二支撑架5内侧上部设有接触机构14。
38.下料机构11包括有拉杆111、导向块112、下料板113和第一弹簧114,第一固定块6
前侧上部中间滑动式设有拉杆111,反应箱4底部左右两侧均焊接有导向块112,两个导向块112内侧之间滑动式连接有下料板113,下料板113与拉杆111连接,下料板113后侧开有凹槽,拉杆111后侧绕有第一弹簧114,第一弹簧114两端分别与第一固定块6和下料板113连接。
39.下压机构12包括有第一伸缩杆121、第二弹簧122、电动推杆123、连接块124和接触开关125,反应箱4内壁上侧焊接有多根第一伸缩杆121,第一伸缩杆121与承料箱9连接,多根第一伸缩杆121上均绕有第二弹簧122,第二弹簧122两端分别与第一伸缩杆121和承料箱9连接,第二支撑架5内壁上侧后部通过螺栓固定安装有电动推杆123,电动推杆123的伸缩杆底端焊接有连接块124,连接块124与承料箱9配合,第一固定块6前侧右部安装有接触开关125。
40.升温机构13包括有距离传感器131、发热模组132、第二固定块133和温度传感器134,第二支撑架5内壁上侧后部安装有距离传感器131,距离传感器131位于电动推杆123的右侧,反应箱4外侧焊接有多个第二固定块133,多个第二固定块133之间连接有发热模组132,反应箱4内壁下部安装有温度传感器134。
41.接触机构14包括有第二伸缩杆141、第三弹簧142、压板143、拉绳144、第三支撑架145、第一减速电机146、第一转轴147和绕线轮148,第二支撑架5内壁上部左右两侧均设有第二伸缩杆141,两根第二伸缩杆141底端之间连接有压板143,两根第二伸缩杆141上均绕有第三弹簧142,第三弹簧142两端分别与第二支撑架5和压板143连接,第二支撑架5内壁上部中间焊接有第三支撑架145,第三支撑架145前侧通过螺栓固定安装有第一减速电机146,第一减速电机146输出轴前侧设有第一转轴147,第一转轴147前侧设有绕线轮148,绕线轮148与压板143之间连接有拉绳144。
42.还包括有搅拌机构15,搅拌机构15包括有第三伸缩杆151、第四弹簧152、压力传感器153、第二减速电机154、第二转轴155和搅拌叶156,第二支撑架5内壁上部中间设有第三伸缩杆151,第三伸缩杆151位于第二支撑架5的后侧,压板143后侧中间安装有压力传感器153,压力传感器153与第三伸缩杆151连接,第三伸缩杆151上绕有第四弹簧152,第四弹簧152两端分别与第二支撑架5和压板143连接,废液箱2顶部中间通过螺栓固定安装有第二减速电机154,第二减速电机154输出轴上侧设有第二转轴155,第二转轴155与反应箱4转动式连接,第二转轴155上侧安装有搅拌叶156。
43.还包括有上升机构16,上升机构16包括有滑杆161、第五弹簧162和第三固定块163,承料箱9前侧上部中间焊接有第三固定块163,第三固定块163上滑动式设有滑杆161,滑杆161与支撑板10连接,滑杆161下侧绕有第五弹簧162,第五弹簧162两端分别与滑杆161和第三固定块163连接。
44.还包括有控制箱7,第一固定块6前侧上部通过螺栓固定安装有控制箱7,控制箱7内安装有开关电源、控制模块和电源模块,开关电源为智能快速电极去极化设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;接触开关125、距离传感器131、温度传感器134和压力传感器153均与控制模块通过电性连接,电动推杆123、发热模组132和第二减速电机154均与控制模块通过继电器控制模块连接,第一减速电机146与控制模块通过直流电机正反转模块连接。
45.本发明的工作原理是,当人们想要对电极去极化时,可使用这种智能快速电极去极化设备,首先,使用者按下电源总开关,将本设备上电,使用者将电极放入承料箱9中,电极放入完成后,随后使用者再将电解液倒入反应箱4中,使用者按压下压机构12,使得控制模块控制下料机构11向下运动两秒钟后关闭,下料机构11向下运动到与承料箱9接触后,从而带动承料箱9、支撑板10和电极向下运动,当下压机构12与升温机构13之间的距离达到升温机构13的预设值时,使得控制模块控制升温机构13运转,与此同时,控制模块控制接触机构14运转五秒钟后关闭,接触机构14向下运动到与支撑板10上的电极接触后,接触机构14对电极进行固定,防止电极发生位置偏移,升温机构13对电解液进行加热,从而增强电解液的反应效率,当电解液的温度达到升温机构13的预设值时,使得控制模块控制升温机构13停止运转,碳棒8对反应箱4中的电解液进行去极化,电解液去极化完成后,使用者操作下料机构11运转,使得去极化完成的电解液通过反应箱4流入废液箱2中,电解液全部流出后,使用者控制下料机构11反向运转到恢复原位,随后使用者再次按压下压机构12,使得控制模块控制下料机构11向上运动两秒钟后关闭,当下压机构12与升温机构13之间的距离小于升温机构13的预设值时,控制模块控制接触机构14反向运转五秒钟后关闭,接触机构14向上运动脱离承料箱9后,使得下压机构12带动承料箱9和支撑板10向上运动到恢复原位,使用者再次按下电源总开关,将本设备断电。
46.电解液去极化完成后,使用者向前拉动拉杆111,拉杆111带动下料板113向前运动,第一弹簧114被压缩,下料板113凹槽部分向前运动到与反应箱4板凹槽部分接触后,使用者控制拉杆111停留,使得电解液通过反应箱4流入废液箱2中,废液箱2对电解液进行收集,电解液流出完成后,使用者松开拉杆111,第一弹簧114复位,从而带动下料板113和拉杆111向后运动到恢复原位,使得下料板113凹槽部分远离反应箱4板凹槽部分。
47.使用者将电极放入承料箱9后,电极通过承料箱9掉落在支撑板10上,接着使用者按下接触开关125,使得控制模块控制电动推杆123的伸缩杆向下伸长两秒钟后关闭,电动推杆123的伸缩杆带动连接块124向下运动,连接块124向下运动到与承料箱9接触后,从而带动承料箱9、支撑板10和电极向下运动,第一伸缩杆121向下收缩,第二弹簧122被压缩,使得承料箱9对电极进行向下运送,从而节省使用者搬运电极的工作步骤,电极去极化完成后,使用者再次按下接触开关125,使得控制模块控制电动推杆123的伸缩杆向上缩短两秒钟后关闭,电动推杆123的伸缩杆带动连接块124向上运动,连接块124向上运动脱离承料箱9后,第二弹簧122复位,第一伸缩杆121向上伸长,第一伸缩杆121带动承料箱9、支撑板10和电极向上运动到恢复原位。
48.当连接块124向下运动时,连接块124与距离传感之间的距离达到距离传感器131的预设值时,使得控制模块控制发热模组132工作,发热模组132散发出的热量对电解液进行加热,从而增强电解液的反应效率,当电解液的温度达到温度传感器134的预设值时,使得控制模块控制发热模组132停止工作,热量随之停止产生。
49.拉绳144缠绕在绕线轮148上,当连接块124与距离传感之间的距离达到距离传感器131的预设值时,使得控制模块控制第一减速电机146工作五秒钟后关闭,第一减速电机146输出轴带动第一转轴147和绕线轮148转动,绕线轮148对拉绳144解绕,处于压缩状态的第三弹簧142复位,第二伸缩杆141向下伸长,第二伸缩杆141带动压板143向下运动,压板143向下运动到与支撑板10上的电极接触后,压板143对电极进行固定,防止电极发生位置
偏移,当连接块124向上运动与距离传感器131之间的距离小于距离传感器131的预设值时,使得控制模块控制第一减速电机146工作五秒钟后关闭,第一减速电机146输出轴带动第一转轴147和绕线轮148反向转动,绕线轮148对拉绳144进行缠绕,绕线轮148拉动拉绳144,拉绳144带动压板143向上运动,第二伸缩杆141向上收缩,第三弹簧142被压缩,使得压板143远离电极。
50.当压板143向下运动时,压板143通过压力传感器153带动第三伸缩杆151向下伸长,处于压缩状态的第四弹簧152复位,当第三伸缩杆151产生的压力小于压力传感器153的预设值时,使得控制模块控制第二减速电机154工作,第二减速电机154输出轴带动第二转轴155和搅拌叶156转动,搅拌叶156对反应箱4中的电解液进行搅拌,从而提高电解液的反应效率,当压板143向上运动时,压板143通过压力传感器153带动第三伸缩杆151向上缩短,第四弹簧152被压缩,当第三伸缩杆151产生的压力达到压力传感器153的预设值时,使得控制模块控制第二减速电机154停止工作,搅拌叶156随之停止转动。
51.电极去极化完成后,使用者向上拉动滑杆161,第五弹簧162被压缩,滑杆161带动支撑板10向上运动,支撑板10带动电极向上运动,支撑板10向上运动到指定位置后,使用者控制滑杆161停留,接着使用者将电极从支撑板10上取出,电极取出后,使用者松开滑杆161,第五弹簧162复位,从而带动滑杆161和支撑板10向下运动到恢复原位。
52.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1