纯电动直驱型旋挖钻机动力系统及多电机协同控制算法的制作方法
[0001]
本发明涉及基础施工技术领域的旋挖钻机,具体说本发明基于传统发动机或三相异步电机联合液压驱动型旋挖钻机主作业动作及特点提出一种适用于旋挖钻机的纯电动直驱型旋挖钻机动力系统及多电机协同控制算法。
背景技术:
[0002]
近年基建行业发展迅猛,国内各工程机械制造厂商均提出了适合市场的适用于基础工程机械施工的旋挖钻机技术方案,且性能得到了市场的充分验证。现存旋挖钻机在功能层面已经能够很好地满足各类客户的使用需求,但整机驱动力来源仍停留在传统动力,各项功能也都依托于传统的发动机或三相异步电机联合液压驱动的动力输出实现,不符合“节能、绿色、环保”的发展主题,未挖掘、利用新能源动力技术资源,滞后于工程机械电动化发展趋势。另外,传统旋挖钻机受限于液压系统固有特性(压力受干扰波动),复合动作相对较少,且复合动作稳定性差、功能多样性差,减少液压驱动执行元件对于提升旋挖钻机复合动作稳定性及复合动作多样性具有重要意义。
技术实现要素:
[0003]
本发明的目的正是针对上述现有技术中所存在的不足之处而提供一种适用于旋挖钻机的纯电动直驱型旋挖钻机动力系统及多电机协同控制算法。本发明核心是减少液压控制执行元件的数目,增加旋挖钻机复合动作的稳定性及多样性。具体说,通过多个永磁同步电机分别驱动动力头、主卷扬和主泵,使主卷扬和动力头的动作不再受限于液压驱动系统,使旋挖钻复合动作更加稳定、多样化。
[0004]
本发明的目的可通过下述技术措施来实现:本发明的适用于旋挖钻机的纯电动直驱型旋挖钻机动力系统包括采用动力电池耦合外接电缆联合供电模式的供电部分,根据各执行动作需求功率从供电部分取电,并将该部分电能转化为永磁同步电机的动能的电驱动部分,以及动作执行部分;所述电驱动部分包括分别与供电部分电连接的主泵电机控制器、主卷扬电机控制器、动力头电机控制器;所述动作执行部分包括与主泵电机控制器电连接的负责驱动液压泵实现履带行走、桅杆调幅、加压动作的主泵电机,与主卷扬电机控制器电连接的负责驱动卷扬机起重的主卷扬电机,与动力头电机控制器电连接的负责驱动动力头钻孔的动力头电机。
[0005]
进一步说,所述主泵电机通过减速机以机械连接的方式与用于驱动履带行走、桅杆调幅、加压动作的液压泵构成的泵组+控制阀组相连接;主泵电机的电能由电缆+动力电池构成的复合供电电源经主泵电机控制器控制输出转化提供;所述主泵电机为永磁同步电机。
[0006]
用于钻杆的提升和下放的主卷扬与主卷扬电机通过减速机以机械连接的方式结合在一起,主卷扬电机的电能由电缆+动力电池的复合供电电源经主卷扬电机控制器控制输出转化提供;主卷扬电机为旋挖钻正常打钻作业的核心部件,由其驱动钻杆的提升、下
放,并实现卸土等操作;所述主卷扬电机为永磁同步电机。
[0007]
所述动力头与动力头电机通过减速机以机械连接的方式结合在一起,动力头电机的电能由电缆+动力电池的复合供电电源经动力头电机控制器控制输出转化提供;动力头电机为旋挖钻正常打钻作业的核心执行功能部件,由其为动力头旋挖提供周向扭矩,驱动钻杆的周向旋转、切削,所述动力头电机为永磁同步电机。
[0008]
本发明的多电机协同控制算法核心思想:旋挖钻机在施工作业过程中会存在多种复合动作,这些复合动作需要多个电机共同配合完成。为了保证旋挖钻机施工作业的安全性,根据各电机的用途不同,将三类电机进行优先级排序;在进行多电机协同控制时,根据电机优先级顺序从高到低的原则依次满足对应电机的功率需求。技术方案的具体实施方式,以及进一步优化、改进或可替代的技术方案。具体步骤如下:a、定义电机优先级顺序:由于主泵电机负责驱动液压泵实现履带行走,桅杆调幅,动力头加压等动作,完成这些动作是旋挖钻机能够正常开始工作的前提,因此将主泵电机的优先级定义为最高;主卷扬电机负责驱动主卷扬起重,考虑到主卷扬提升或下放钻杆过程的危险程度较大,因此将主卷扬电机优先级定义为次之;动力头电机负责驱动动力头进行钻孔作业,相对于主泵电机和主卷扬电机风险较小,因此定义动力头电机优先级最低;b、多电机功率分配:动力源是由动力电池或动力电池+整流柜组合形式组成;预留功率余量部分含义为在动力电池可提供最大功率能力的基础上,根据实际需求预留了一部分功率余量,主要目的是为了保证三类电机实际功率总和不超过动力源可提供的最大功率,避免动力电池充放电超限;如电动旋挖钻机完成某一操作主泵电机需求功率为p1,主卷扬电机需求功率为p2,动力头电机需求功率为p3,动力源可提供功率为pmax,预留功率余量为p4,具体分配方案如下所述:当pmax
-ꢀ
p4<p1,则主泵电机分配功率为pmax
-ꢀ
p4,主卷扬电机和动力头电机分配功率均为0;当p1<pmax-p4<p1+p2,则主泵电机分配功率为p1,主卷扬电机分配功率为pmax-p4-p1,动力头电机分配功率为0;当p1+p2<pmax-p4<p1+p2+p3,则主泵电机分配功率为p1,主卷扬电机分配功率为p2,动力头电机分配功率为pmax-p4-p1-p2;当pmax-p4>p1+p2+p3,则主泵电机分配功率为p1,主卷扬电机分配功率为p2,动力头电机分配功率为p3。
[0009]
更具体说,本发明考虑到旋挖钻机多动作复合作业时需求功率较大,单独依靠动力电池供电,所需匹配动力电池较大,成本较高。单独依靠电缆供电,则电缆负载较大,对高压供电设备电压影响较大。因此本发明采用动力电池耦合电缆联合供电的模式,保证旋挖钻作业过程中供电正常。
[0010]
本发明的电驱动部分的作用是根据各执行动作需求功率从供电部分取电,并将该部分电能转化为永磁同步电机的动能。
[0011]
本发明的动作执行部分根据整机操作指令,完成各个传统动作。
[0012]
为便于本发明功能优势描述,将专利中用到的永磁同步电机区分成三类,具体如下所述:
1)负责驱动液压泵实现履带行走/桅杆调幅/加压等动作的电机,为主泵电机;2)负责驱动卷扬机起重的电机,命名为主卷扬电机;3)负责驱动动力头钻孔的电机,命名为动力头电机;以上各类电机不限于单电机形式驱动,也可以是双电机(或多电机)形式共同驱动。
[0013]
本发明的有益效果如下:
①
选择性地保留部分液压驱动系统,并对现行液压驱动系统进行整合,通过主泵、主控制阀实现整机液压驱动系统的控制,减少液压驱动系统的传递路径,通过三类永磁同步电机分别直接驱动主卷扬、动力头及主泵的驱动模式,有效提升液压系统复合动作的多样性和稳定性;
②
提出一种电动旋挖钻机多电机协同控制算法,该算法将电机进行优先级划分,动力源优先满足优先级顺序高的电机功率需求,这样可以保证旋挖钻机在满足安全性的前提下进行生产。
附图说明
[0014]
图1是本发明的纯电动直驱型旋挖机动力系统原理图。
[0015]
图1中序号:1是整流变频柜,2是主泵电机控制器,3是主泵电机,4是泵组+控制阀组,5是主卷扬电机控制器,6是主卷扬电机,7是主卷扬,8是动力头电机控制器,9是动力头电机,10是动力头,11动力蓄电池系统,12是整流模块。
[0016]
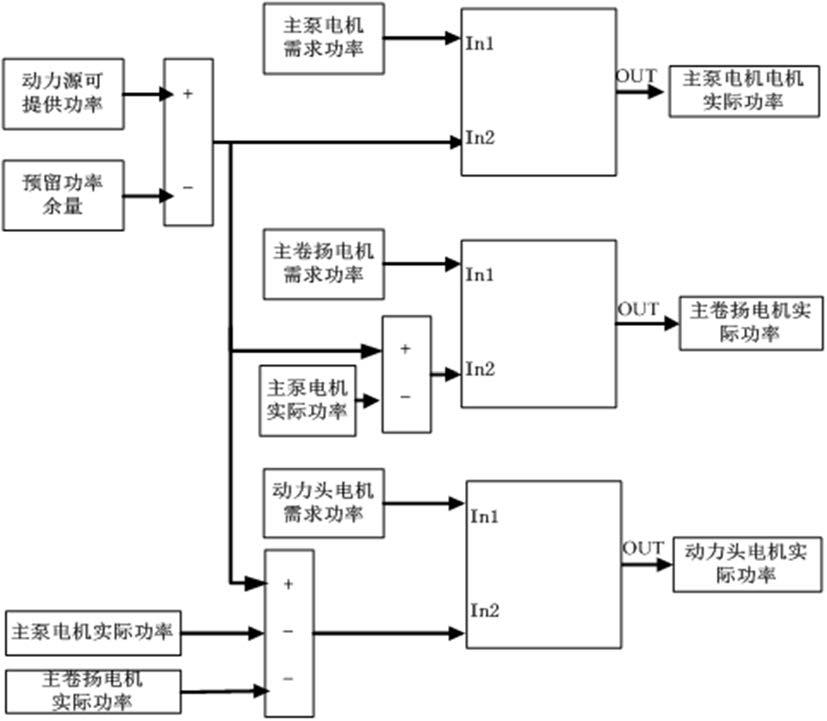
图2是电动旋挖钻机多电机功率分配方式原理图。
具体实施方式
[0017]
本发明以下将结合实施例(附图)作进一步描述。
[0018]
如图1所示,本发明的适用于旋挖钻机的纯电动直驱型旋挖钻机动力系统包括采用动力电池耦合外接电缆联合供电模式的供电部分,根据各执行动作需求功率从供电部分取电,并将该部分电能转化为永磁同步电机的动能的电驱动部分,以及动作执行部分;所述电驱动部分包括分别与供电部分电连接的主泵电机控制器2、主卷扬电机控制器5、动力头电机控制器8;所述动作执行部分包括与主泵电机控制器电连接的负责驱动液压泵实现履带行走、桅杆调幅、加压动作的主泵电机3,与主卷扬电机控制器电连接的负责驱动卷扬机起重的主卷扬电机6,与动力头电机控制器电连接的负责驱动动力头钻孔的动力头电机9。
[0019]
进一步说,所述主泵电机3通过减速机以机械连接的方式与用于驱动履带行走、桅杆调幅、加压动作的液压泵构成的泵组+控制阀组4相连接;主泵电机的电能由电缆+动力电池构成的复合供电电源经主泵电机控制器控制输出转化提供;所述主泵电机为永磁同步电机。
[0020]
用于钻杆的提升和下放的主卷扬7与主卷扬电机6通过减速机以机械连接的方式结合在一起,主卷扬电机的电能由电缆+动力电池的复合供电电源经主卷扬电机控制器控制输出转化提供;主卷扬电机为旋挖钻正常打钻作业的核心部件,驱动钻杆的提升、下放,并实现卸土等操作;所述主卷扬电机为永磁同步电机。
[0021]
所述动力头10与动力头电机9通过减速机以机械连接的方式结合在一起,动力头电机的电能由电缆+动力电池的复合供电电源经动力头电机控制器控制输出转化提供;动
力头电机为旋挖钻正常打钻作业的核心执行功能部件,由其为动力头旋挖提供周向扭矩,驱动钻杆的周向旋转、切削,所述动力头电机为永磁同步电机。
[0022]
如图2所示,本发明的多电机协同控制算法核心思想:旋挖钻机在施工作业过程中会存在多种复合动作,这些复合动作需要多个电机共同配合完成。为了保证旋挖钻机施工作业的安全性,根据各电机的用途不同,将三类电机进行优先级排序;在进行多电机协同控制时,根据电机优先级顺序从高到低的原则依次满足对应电机的功率需求。技术方案的具体实施方式,以及进一步优化、改进或可替代的技术方案。具体步骤如下:a、定义电机优先级顺序:由于主泵电机负责驱动液压泵实现履带行走,桅杆调幅,动力头加压等动作,完成这些动作是旋挖钻机能够正常开始工作的前提,因此将主泵电机的优先级定义为最高;主卷扬电机负责驱动主卷扬起重,考虑到主卷扬提升或下放钻杆过程的危险程度较大,因此将主卷扬电机优先级定义为次之;动力头电机负责驱动动力头进行钻孔作业,相对于主泵电机和主卷扬电机风险较小,因此定义动力头电机优先级最低;b、多电机功率分配:动力源是由动力电池或动力电池+整流柜组合形式组成;预留功率余量部分含义为在动力电池可提供最大功率能力的基础上,根据实际需求预留了一部分功率余量,主要目的是为了保证三类电机实际功率总和不超过动力源可提供的最大功率,避免动力电池充放电超限;如电动旋挖钻机完成某一操作主泵电机需求功率为p1,主卷扬电机需求功率为p2,动力头电机需求功率为p3,动力源可提供功率为pmax,预留功率余量为p4,具体分配方案如下所述:当pmax
-ꢀ
p4<p1,则主泵电机分配功率为pmax
-ꢀ
p4,主卷扬电机和动力头电机分配功率均为0;当p1<pmax-p4<p1+p2,则主泵电机分配功率为p1,主卷扬电机分配功率为pmax-p4-p1,动力头电机分配功率为0;当p1+p2<pmax-p4<p1+p2+p3,则主泵电机分配功率为p1,主卷扬电机分配功率为p2,动力头电机分配功率为pmax-p4-p1-p2;当pmax-p4>p1+p2+p3,则主泵电机分配功率为p1,主卷扬电机分配功率为p2,动力头电机分配功率为p3。
[0023]
更具体说,本发明考虑到旋挖钻机多动作复合作业时需求功率较大,单独依靠动力电池供电,所需匹配动力电池较大,成本较高。单独依靠电缆供电,则电缆负载较大,对高压供电设备电压影响较大。因此本发明采用动力电池耦合电缆联合供电的模式,保证旋挖钻作业过程中供电正常。
[0024]
本发明的电驱动部分的作用是根据各执行动作需求功率从供电部分取电,并将该部分电能转化为永磁同步电机的动能。
[0025]
本发明的动作执行部分根据整机操作指令,完成各个传统动作。
[0026]
为便于本发明功能优势描述,将专利中用到的永磁同步电机区分成三类,具体如下所述:1)负责驱动液压泵实现履带行走/桅杆调幅/加压等动作的电机,为主泵电机;2)负责驱动卷扬机起重的电机,命名为主卷扬电机;3)负责驱动动力头钻孔的电机,命名为动力头电机;
以上各类电机不限于单电机形式驱动,也可以是双电机(或多电机)形式共同驱动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1