随钻泥浆正脉冲信号的处理方法与流程
1.本发明涉及油气随钻脉冲信号处理技术领域,是一种随钻泥浆正脉冲信号的处理方法。
背景技术:
2.二十一世纪,石油是地球上不可再生资源的一种,已经成为了人们社会生活中不可或缺的必需资源,被誉为“黑色的黄金”。一个国家要想得到快速的发展和进步,只有抢占现存必需资源的先机,而这不仅要看国家资源的总量多少,还有最重要的开发资源的效率高低,所以只有不断提高石油的勘探技术,才能快速有效的发展国家经济建设,为国家的长治久安提供保障。
3.在石油的勘探的过程中,对地底信息的的测量是必不可缺的,运用随钻测量(measurement while drilling,mwd)技术可以实现在钻井的同时经过某些特定的介质将地底的信息实时的传送到地面的的压力传感器,再从传感器导到计算机,然后对这些信息进行分析、存储和处理。mwd技术在准确测估地下信息方面有着至关重要的研究价值,我们可以利用mwd技术极大地提高石油的采集率从而降低石油成本。常见的mwd信号传输方式有四种,分别为电缆传输、泥浆脉冲传输、声波传输和电磁传输。
4.如今,在mwd信号传输系统中,钻井泥浆液是最普遍的传输介质,虽然泥浆液信号传输技术目前在国内已经相对成熟,但是还是普遍存在以下不足:噪声处理方法不完善;当有用信号的幅度较小或者背景噪声幅度较强时,无法进行有效的提取。泥浆压力传感器在地面钻井口处,距离高强度工作的泥浆泵很近,这里的噪声环境非常复杂,这些噪声直接淹没了有用信号,而有用脉冲信号也因为长距离的传输或信号反射的原因会发生信号的衰减,乃至畸变。于是乎,运用什么方法消除各种噪声干扰,将掺杂着复杂的背景噪声的泥浆有用脉冲信号提取出来,成为了mwd系统的一个主要问题。
5.伴随着mwd技术在国内外各大工业的快速发展,很好的提高了人们对关键去噪问题方面研究的关注度,也涌现出了各式各类的去噪算法,其中:
6.公开号为104133982的中国专利申请文献,申请日2014年6月27日,申请公布日2014年11月5日,发明创造的名称为一种泥浆脉冲信号泵冲噪声的消除方法,该案突破了硬件电路的限制,利用matlab软件有效实现泥浆脉冲信号的滤波过程,同时将梳状滤波器应用于泥浆脉冲信号,进一步加强了滤波效果,但从其结果来看,较强噪声能量的滤除效果依旧未达到工业水平。
7.公开号为111079559的中国专利申请文献,申请日2019年11月26日,申请公布日2020年4月28日,发明创造的名称为一种基于卷积神经网络的泥浆脉冲信号识别方法,该案公开了一种基于卷积神经网络的泥浆脉冲信号识别方法,通过训练数据对神经网络模型进行训练,使其获得自动抓取信号波形上关键特征的能力,并通过这些特征对信号进行分类,从而提升识别泥浆脉冲信号的准确率,但其可变性太大,很难符合工业水平。
8.公开号为111308560的中国专利申请文献,申请日2019年12月18日,申请公布日
2020年6月19日,发明创造的名称为一种随钻测量mwd系统噪声消除方法和装置,该案公开了一种根据所述泥浆信号中周期噪声信号的特征频率、所述频域的泥浆信号和预先设置的抑制因子得到消噪后的泥浆频域输出信号的方法,但现场实现难度较大,因此对于现场实际信号处理的效果有待验证。
技术实现要素:
9.本发明提供了一种随钻泥浆正脉冲信号的处理方法,克服了上述现有技术之不足,提出一种新颖的基于单立管压力传感器的随钻泥浆正脉冲信号处理方法,其能达到有效正脉冲信号快速、准确和可靠的识别,实现井下数据高效传输。
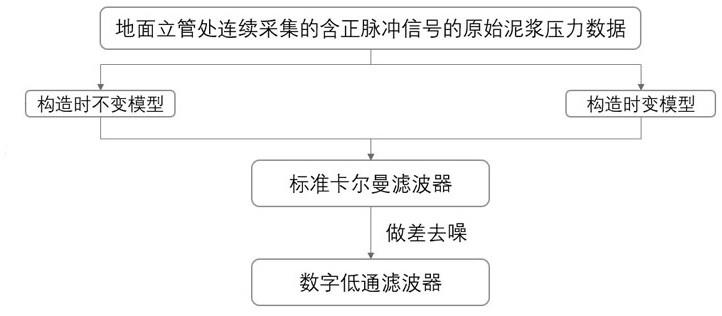
10.本发明的技术方案是通过以下措施来实现的:一种随钻泥浆正脉冲信号的处理方法,包括下述步骤:
11.步骤一,对于在地面立管处连续采集的原始泥浆脉冲信号(原始泥浆压力数据)构造泵噪声模型,再将泵噪声模型转换为线性模型的形式;
12.步骤二,将泵噪声已转换成线性模型的脉冲信号进行标准卡尔曼滤波处理,去除泵噪声;
13.步骤三,对于经过标准卡尔曼滤波去除泵噪声后的信号数据,进行低通滤波去除高频随机噪声,得到低通后的脉冲信号数据。
14.下面是对上述发明技术方案的进一步优化或/和改进:
15.上述步骤一中,在构造泵噪声模型过程中,将泵噪声基波和各阶次进行构造,确定谐波系统的状态变量x(n+1)和观测变量z(n),确保能够应用卡尔曼滤波进行泵噪声提取。
16.上述步骤一中,线性模型采用时不变线性模型或时变线性模型,时不变线性模型的状态方程x(n+1)和测量方程z(n)表示为:
[0017][0018]
z(n)=[1 0
ꢀ…ꢀ
1 0]x(n)+v(n)
[0019]
式中,w(n)为状态转移的过程噪声,v(n)为测量中的测量噪声;
[0020]
时变线性模型的状态方程x(n+1)和测量方程z(n)表示为:
[0021][0022]
z(n)=[sin(w1n) cos(w1n)
…
sin(kw1n)cos(kw1n)]x(n)+v(n)
[0023]
式中,i为2阶单位矩阵,w(n)为状态转移的过程噪声,v(n)为测量中的测量噪声。
[0024]
所述时不变线性模型:泵噪声模型的状态方程和测量方程均为线性,并且状态转移矩阵和测量矩阵不随时间变化;所述时变线性模型:泵噪声模型的状态方程和测量方程为线性,状态转移矩阵为常值矩阵,而测量矩阵是时变的。
[0025]
优选的是,所述时不变线性模型优于时变线性模型,对泵噪声的基波及2至12阶次
谐波进行构造,即对约20hz以下的泵噪声进行了构造和去除操作。
[0026]
上述步骤二中,标准卡尔曼滤波处理按下述方法进行:根据标准卡尔曼滤波算法递推法则,向前推算状态变量和误差协方差,计算卡尔曼增益k,由观测变量更新估计值,更新误差协方差,不断循环上述步骤,进行卡尔曼滤波,最后从原始泥浆脉冲信号中做差去除泵噪声。
[0027]
上述步骤二中,标准卡尔曼滤波处理按下述方法进行:
[0028]
(1)以下述公式向前推算状态变量,
[0029][0030]
式中,为状态变量的估计值,
[0031]
(2)以下述公式向前推算误差协方差,
[0032]
p
′
(k)=a(k
‑
1)p(k
‑
1)a
t
(k
‑
1)+q(k
‑
1)
[0033]
式中,p
′
(k)为误差协方差的估计值,
[0034]
(3)以下述公式计算卡尔曼增益k,
[0035]
k(k)=p
′
(k)h
t
(k)[h(k)p
′
(k)h
t
(k)+r(k)]
‑1[0036]
(4)以下述公式由观测变量(测量值)更新估计,
[0037][0038]
(5)以下述公式更新误差协方差,
[0039]
p(k)=[i
‑
k(k)h(k)]p
′
(k)
[0040]
式中,p(k)为误差协方差,
[0041]
状态变量的初始值为误差协方差的初始值为p(0),不断循环步骤(1)至(5),进行卡尔曼滤波,最后从原始泥浆脉冲信号中做差去除泵噪声。
[0042]
经标准卡尔曼滤波和做差去除泵噪声后,0hz至20hz的泵噪声均得到了有效的抑制,仅残余20hz以上的高频随机噪声。
[0043]
上述步骤三中,采用低通滤波器进行低通滤波,所述低通滤波器采用fir数字滤波器或巴特沃斯数字滤波器或契比雪夫数字滤波器,所述低通滤波器的截止频率大于随钻现场所用泥浆泵泵冲的三次谐波频率。
[0044]
上述优选的是,所述低通滤波器的截止频率为靠近随钻现场所用泥浆泵泵冲的三次谐波频率的整数值。
[0045]
本发明在充分依据随钻泥浆正脉冲信号产生、传输及加噪特性的基础上,根据单立管压力传感器的随钻泥浆压力信号构造泵噪声模型,再将泵噪声模型转换为线性模型,再通过标准卡尔曼滤波和数字低通滤波器等后续处理,以获得有用脉冲传输信号;且该处理方法简便可靠,能有效锁定正脉冲信号,显著降低误码率,具有很大的实用价值。
附图说明
[0046]
附图1为本发明所述随钻泥浆正脉冲信号的处理方法的流程图。
[0047]
附图2为含正脉冲信号的某原始泥浆压力数据。
[0048]
附图3为原始泥浆压力数据频谱图。
[0049]
附图4为本发明所述处理方法步骤二中所述标准卡尔曼滤波器滤波过程示意图。
[0050]
附图5为原始泥浆压力信号构造的时不变线性模型提取的泵噪声信号与仿真信号的对比图。
[0051]
附图6为本发明实施例中,时不变线性模型经标准卡尔曼滤波后的正脉冲信号数据。
[0052]
附图7为本发明实施例中,时不变线性模型经标准卡尔曼滤波后的正脉冲信号频谱。
[0053]
附图8为原始泥浆压力信号构造的时不变线性模型提取的泵噪声信号与仿真信号的对比图。
[0054]
附图9为本发明实施例中,时变线性模型经标准卡尔曼滤波后的正脉冲信号数据。
[0055]
附图10为本发明实施例中,时变线性模型经标准卡尔曼滤波后的正脉冲信号频谱。
[0056]
附图11为本发明实施例中,经数字低通滤波器滤波后的信号数据。
[0057]
附图12为本发明实施例中,经数字低通滤波器滤波后的信号频谱。
[0058]
附图中,1为含正脉冲信号的原始泥浆压力数据,2为原始泥浆压力数据频谱,3为构造的时不变线性模型,4为时不变线性模型经标准卡尔曼滤波后的正脉冲信号,5为时不变线性模型经标准卡尔曼滤波后的正脉冲信号频谱,6为构造的时变线性模型,7为时变线性模型经标准卡尔曼滤波后的正脉冲信号,8为时变线性模型经标准卡尔曼滤波后的正脉冲信号频谱,9为经数字低通滤波器滤波后的信号,10为经数字低通滤波器滤波后的信号频谱。
[0059]
为了区分各个信号曲线,图7、10中,去除泵噪声的信号8几乎与横坐标重合;
[0060]
图11中,采集信号、去除泵噪声后的信号的颜色逐渐加深;
[0061]
图12中,低通后的有用脉冲信号10(即为去除泵噪声和随机噪声后的信号)几乎与横纵坐标重合,采集信号的颜色最浅。
具体实施方式
[0062]
本发明不受下述实施例的限制,可根据本发明的技术方案与实际情况来确定具体的实施方式。
[0063]
下面结合实施例对本发明作进一步描述:
[0064]
实施例:该随钻泥浆正脉冲信号的处理方法,其流程图如附图1所示,针对如附图2所示的地面立管处连续采集的含正脉冲信号的泥浆压力原始数据,依次进行构造空间状态线性模型,标准卡尔曼滤波器滤波,数字低通滤波器滤波三个步骤,以得到波形特征明显的正脉冲信号。
[0065]
步骤一,构造空间状态线性模型
[0066]
依据随钻泥浆正脉冲信号产生、传输及加噪特性,首先对于在地面立管处连续采集的含正脉冲信号的原始泥浆压力数据1进行fft变换(快速傅立叶变换(fast fourier transform)),获得有关正脉冲信号、泵噪声及其他噪声的频谱特征2(如图3所示);根据采集到的原始泥浆压力数据构造泵噪声模型,再将泵噪声模型转换为线性模型的形式。在构造泵噪声模型过程中,将泵噪声基波和各阶次进行构造,确定谐波系统的状态变量值x(n+1)和观测变量z(n),时不变线性模型数据为数据3(如图5所示),时变线性模型数据为数据6
(如图8所示),确保能够应用卡尔曼滤波进行泵噪声提取。
[0067]
通过图5和图8可以看出,构造的泵噪声信号很好的复原出原始泵噪声的波形。
[0068]
本实施例所述时不变线性模型优于时变线性模型,对泵噪声的基波及2至12阶次谐波进行构造,即对约20hz以下的泵噪声进行了构造和去除操作。
[0069]
时不变线性模型的状态方程x(n+1)和测量方程z(n)表示为:
[0070][0071]
z(n)=[1 0
ꢀ…ꢀ
1 0]x(n)+v(n)
[0072]
式中,w(n)为状态转移的过程噪声,v(n)为测量中的测量噪声;
[0073]
时变线性模型的状态方程x(n+1)和测量方程z(n)表示为:
[0074][0075]
z(n)=[sin(w1n) cos(w1n)
ꢀ…ꢀ
sin(kw1n) cos(kw1n)]x(n)+v(n)
[0076]
式中,i为2阶单位矩阵,w(n)为状态转移的过程噪声,v(n)为测量中的测量噪声。
[0077]
步骤二,标准卡尔曼滤波处理
[0078]
如图4所示,根据标准卡尔曼滤波算法递推法则,向前推算状态变量和误差协方差,计算卡尔曼增益k,由观测变量更新估计,更新误差协方差,不断循环上述步骤,实现卡尔曼滤波,最后从原始信号中做差去除泵噪声。
[0079]
泵噪声已转换成时不变线性模型的脉冲信号进行标准卡尔曼滤波处理后,得到的去泵噪声滤波信号数据4(如图6所示),去泵噪声滤波信号的频谱为数据5(如图7所示)。
[0080]
泵噪声已转换成时变线性模型的脉冲信号进行标准卡尔曼滤波处理后,得到的去泵噪声滤波信号数据7(如图9所示),去泵噪声滤波信号的频谱为数据8(如图10所示)。从去噪后信号的时域图6、图9和频域图7、图10可以看出,泵噪声都被有效抑制,可以认为去噪后的信号数据4(如图6所示)和去泵噪声滤波信号数据7(如图9所示)仅残余随机噪声,达到了泵噪声去除的目的。
[0081]
经标准卡尔曼滤波和做差去除泵噪声后,0hz至20hz的泵噪声均得到了有效的抑制,仅残余20hz以上的高频随机噪声;经对比,优选时不变线性模型搭配标准卡尔曼滤波器,该搭配对泵噪声去除效果更佳。
[0082]
标准卡尔曼滤波器滤波处理为现有技术。
[0083]
步骤三,数字低通滤波器滤波处理
[0084]
对于经过构造时不变线性模型和标准卡尔曼滤波去除泵噪声后的信号数据4(如图6所示),进行低通滤波去除高频随机噪声,得到低通后的有用脉冲信号数据9(如图11所示),低通后的有用脉冲信号的频谱为数据10(如图12所示)。
[0085]
本发明实施例所述编码规则为组合编码。
[0086]
最后对所述信号完成解码,即可实现基于泥浆正脉冲信号的随钻数据传输。
[0087]
综上所述,本发明所述处理方法包括构造泵噪声的状态空间模型、标准卡尔曼滤波和数字低通滤波器滤波三个步骤,通过这三个步骤达到快速、准确和可靠的识别有效正脉冲信号,实现井下数据高效传输;其在充分依据随钻泥浆正脉冲信号产生、传输及加噪特性的基础上,提出一种新颖的基于单立管压力传感器的随钻泥浆正脉冲信号处理方法,经现场实际数据测试表明,该方法简便可靠,能有效锁定正脉冲信号,降低误码率,具有很大的实用价值。
[0088]
以上技术特征构成了本发明的实施例,其具有较强的适应性和实施效果,可根据实际需要增减非必要的技术特征,来满足不同情况的需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1