一种适用于掘锚护一体机的全断面铲运装置及使用方法与流程
1.本发明属于采煤设备技术领域,特别是涉及一种适用于掘锚护一体机的全断面铲运装置及使用方法。
背景技术:
2.在井下掘进采煤过程中,截割下来的煤块需要利用铲板或铲斗等装载机械进行收集和转运,对于断面较大的巷道来说,为了收集巷道两侧的落煤,需要左右偏转掘进机机身来调整铲板位置,进而才能够将巷道两侧的落煤顺利铲入铲板内,但是掘进机机身进行频繁的左右偏转位置调整,会对巷道底板造成重复碾压破坏,而且频繁的位置调整还会导致掘进效率降低。
技术实现要素:
3.针对现有技术存在的问题,本发明提供一种适用于掘锚护一体机的全断面铲运装置及使用方法,改变了传统的落煤铲运方式,无需调整掘进机机身,就可以顺利的将巷道两侧的落煤铲入铲板内,从而避免了因频繁调整掘进机机身位置导致的重复碾压破坏巷道底板的问题,进一步提高了掘进效率。
4.为了实现上述目的,本发明采用如下技术方案:一种适用于掘锚护一体机的全断面铲运装置,包括主铲板机构、辅助铲板机构、铲运滑移体及刮板输送机;所述铲运滑移体设置在掘锚护一体机的主支撑部滑靴上,铲运滑移体相对于主支撑部滑靴具有前后滑移自由度,在铲运滑移体与主支撑部滑靴之间连接有铲运滑移体滑移驱动油缸;所述主铲板机构设置在铲运滑移体前端,刮板输送机位于主铲板机构后方;所述辅助铲板机构设置在掘锚护一体机的辅助支撑部滑靴前端,辅助铲板机构相对于辅助支撑部滑靴具有前后移动自由度。
5.所述主铲板机构包括中间铲板、侧铲板、边部折叠铲板、星轮及主铲齿;所述中间铲板的中部与刮板输送机的进料端相连;所述侧铲板位于中间铲板左右两侧,侧铲板与中间铲板固定连接;所述边部折叠铲板位于侧铲板的外侧,边部折叠铲板与侧铲板相铰接,在边部折叠铲板背部与侧铲板背部连接有折叠铲板翻转驱动油缸;所述星轮分布在刮板输送机进料端左右两侧的中间铲板上;所述主铲齿均布设置在中间铲板和侧铲板的最前端。
6.所述辅助铲板机构包括铲耙、耙齿、连杆弯臂、滑座体、弯臂摆转驱动油缸及铲耙俯仰驱动油缸;所述滑座体设置在辅助支撑部滑靴内,滑座体相对于辅助支撑部滑靴具有前后滑移自由度,在滑座体与辅助支撑部滑靴之间连接有滑座体滑移驱动油缸;所述连杆弯臂一端铰接在滑座体前端,连杆弯臂另一端与铲耙背部相铰接;所述弯臂摆转驱动油缸一端铰接在滑座体上,弯臂摆转驱动油缸另一端铰接在连杆弯臂上;所述铲耙俯仰驱动油缸一端铰接在连杆弯臂上,铲耙俯仰驱动油缸另一端铰接在铲耙背部;所述耙齿均布设置在铲耙的最前端。
7.在所述边部折叠铲板上设置有第一倾角传感器,通过第一倾角传感器实时测量边
部折叠铲板的摆转角度;在所述铲耙上分别设置有第二倾角传感器和第三倾角传感器,通过第二倾角传感器实时测量铲耙的水平摆转角度,通过第三倾角传感器实时测量铲耙的俯仰摆转角度;在所述铲运滑移体滑移驱动油缸的缸筒与铲运滑移体之间设置有第一位移传感器,通过第一位移传感器实时测量铲运滑移体的滑移距离;在所述滑座体滑移驱动油缸的缸筒与滑座体之间设置有第二位移传感器,通过第二位移传感器实时测量滑座体的滑移距离;在所述铲运滑移体上设置有控制器,所述第一倾角传感器、第二倾角传感器、第三倾角传感器、第一位移传感器和第二位移传感器的信号输出端均与控制器的信号接收端进行电连接,控制器的指令发送端与掘锚护一体机的液压控制部的指令接收端进行电连接,所述铲运滑移体滑移驱动油缸、滑座体滑移驱动油缸、折叠铲板翻转驱动油缸、弯臂摆转驱动油缸及铲耙俯仰驱动油缸的活塞杆伸缩动作均由液压控制部进行操控。
8.所述的适用于掘锚护一体机的全断面铲运装置的使用方法,包括如下步骤:
9.步骤一:控制铲运滑移体滑移驱动油缸的活塞杆伸出,直到带动铲运滑移体及主铲板机构整体前移设定距离,同时完成中间铲板及侧铲板前方落煤的铲运;
10.步骤二:控制折叠铲板翻转驱动油缸的活塞杆伸出,直到边部折叠铲板向上翻转至设定角度,使边部折叠铲板上的落煤滑入侧铲板及中间铲板上,进而完成这一部分落煤的铲运;
11.步骤三:控制铲运滑移体滑移驱动油缸的活塞杆回缩,直到带动铲运滑移体及主铲板机构整体后移回初始位置;
12.步骤四:控制折叠铲板翻转驱动油缸的活塞杆回缩,直到边部折叠铲板恢复到初始展开状态;
13.步骤五:控制滑座体滑移驱动油缸的活塞杆伸出,直到滑座体及铲耙整体前移设定距离,同时完成巷道两侧落煤的前移集聚;
14.步骤六:控制弯臂摆转驱动油缸的活塞杆伸出,直到铲耙向内翻转至设定角度,使巷道两侧已经前移集聚的落煤被推移到侧铲板及中间铲板的前方;
15.步骤七:控制铲耙俯仰驱动油缸的活塞杆回缩,直到铲耙向上抬起至设定角度;
16.步骤八:控制弯臂摆转驱动油缸的活塞杆回缩,直到铲耙向外翻转回初始位置;
17.步骤九:控制控制滑座体滑移驱动油缸的活塞杆回缩,直到滑座体及铲耙整体后移回初始位置;
18.步骤十:控制铲耙俯仰驱动油缸的活塞杆伸出,直到铲耙向下回落到巷道底板;
19.步骤十一:重复步骤一至步骤十,实现落煤的全断面铲运。
20.本发明的有益效果:
21.本发明的适用于掘锚护一体机的全断面铲运装置及使用方法,改变了传统的落煤铲运方式,无需调整掘进机机身,就可以顺利的将巷道两侧的落煤铲入铲板内,从而避免了因频繁调整掘进机机身位置导致的重复碾压破坏巷道底板的问题,进一步提高了掘进效率。
附图说明
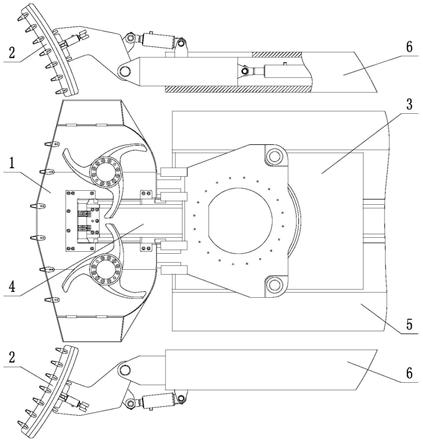
22.图1为本发明的一种适用于掘锚护一体机的全断面铲运装置的俯视图;
23.图2为本发明的主铲板机构的俯视图;
24.图3为本发明的主铲板机构的正视图;
25.图4为本发明的辅助铲板机构的俯视图;
26.图5为全断面铲运装置的动作执行过程示意图;
27.图中,1—主铲板机构,2—辅助铲板机构,3—铲运滑移体,4—刮板输送机,5—主支撑部滑靴,6—支撑部滑靴,7—中间铲板,8—侧铲板,9—边部折叠铲板,10—星轮,11—主铲齿,12—铲耙,13—耙齿,14—连杆弯臂,15—滑座体,16—弯臂摆转驱动油缸,17—铲耙俯仰驱动油缸。
具体实施方式
28.下面结合附图和具体实施例对本发明做进一步的详细说明。
29.如图1~5所示,一种适用于掘锚护一体机的全断面铲运装置,包括主铲板机构1、辅助铲板机构2、铲运滑移体3及刮板输送机4;所述铲运滑移体3设置在掘锚护一体机的主支撑部滑靴5上,铲运滑移体3相对于主支撑部滑靴5具有前后滑移自由度,在铲运滑移体3与主支撑部滑靴5之间连接有铲运滑移体滑移驱动油缸;所述主铲板机构1设置在铲运滑移体3前端,刮板输送机4位于主铲板机构1后方;所述辅助铲板机构2设置在掘锚护一体机的辅助支撑部滑靴6前端,辅助铲板机构2相对于辅助支撑部滑靴6具有前后移动自由度。
30.所述主铲板机构1包括中间铲板7、侧铲板8、边部折叠铲板9、星轮10及主铲齿11;所述中间铲板7的中部与刮板输送机4的进料端相连;所述侧铲板8位于中间铲板7左右两侧,侧铲板8与中间铲板7固定连接;所述边部折叠铲板9位于侧铲板8的外侧,边部折叠铲板9与侧铲板8相铰接,在边部折叠铲板9背部与侧铲板8背部连接有折叠铲板翻转驱动油缸;所述星轮10分布在刮板输送机4进料端左右两侧的中间铲板7上;所述主铲齿11均布设置在中间铲板7和侧铲板8的最前端。
31.所述辅助铲板机构2包括铲耙12、耙齿13、连杆弯臂14、滑座体15、弯臂摆转驱动油缸16及铲耙俯仰驱动油缸17;所述滑座体15设置在辅助支撑部滑靴6内,滑座体15相对于辅助支撑部滑靴6具有前后滑移自由度,在滑座体15与辅助支撑部滑靴6之间连接有滑座体滑移驱动油缸;所述连杆弯臂14一端铰接在滑座体15前端,连杆弯臂14另一端与铲耙12背部相铰接;所述弯臂摆转驱动油缸16一端铰接在滑座体15上,弯臂摆转驱动油缸16另一端铰接在连杆弯臂14上;所述铲耙俯仰驱动油缸17一端铰接在连杆弯臂14上,铲耙俯仰驱动油缸17另一端铰接在铲耙12背部;所述耙齿13均布设置在铲耙12的最前端。
32.在所述边部折叠铲板9上设置有第一倾角传感器,通过第一倾角传感器实时测量边部折叠铲板9的摆转角度;在所述铲耙12上分别设置有第二倾角传感器和第三倾角传感器,通过第二倾角传感器实时测量铲耙12的水平摆转角度,通过第三倾角传感器实时测量铲耙12的俯仰摆转角度;在所述铲运滑移体滑移驱动油缸的缸筒与铲运滑移体3之间设置有第一位移传感器,通过第一位移传感器实时测量铲运滑移体3的滑移距离;在所述滑座体滑移驱动油缸的缸筒与滑座体15之间设置有第二位移传感器,通过第二位移传感器实时测量滑座体15的滑移距离;在所述铲运滑移体3上设置有控制器,所述第一倾角传感器、第二倾角传感器、第三倾角传感器、第一位移传感器和第二位移传感器的信号输出端均与控制器的信号接收端进行电连接,控制器的指令发送端与掘锚护一体机的液压控制部的指令接收端进行电连接,所述铲运滑移体滑移驱动油缸、滑座体滑移驱动油缸、折叠铲板翻转驱动
油缸、弯臂摆转驱动油缸16及铲耙俯仰驱动油缸17的活塞杆伸缩动作均由液压控制部进行操控。
33.所述的适用于掘锚护一体机的全断面铲运装置的使用方法,包括如下步骤:
34.步骤一:控制铲运滑移体滑移驱动油缸的活塞杆伸出,直到带动铲运滑移体3及主铲板机构1整体前移设定距离,同时完成中间铲板7及侧铲板8前方落煤的铲运;
35.步骤二:控制折叠铲板翻转驱动油缸的活塞杆伸出,直到边部折叠铲板9向上翻转至设定角度,使边部折叠铲板9上的落煤滑入侧铲板8及中间铲板7上,进而完成这一部分落煤的铲运;
36.步骤三:控制铲运滑移体滑移驱动油缸的活塞杆回缩,直到带动铲运滑移体3及主铲板机构1整体后移回初始位置;
37.步骤四:控制折叠铲板翻转驱动油缸的活塞杆回缩,直到边部折叠铲板9恢复到初始展开状态;
38.步骤五:控制滑座体滑移驱动油缸的活塞杆伸出,直到滑座体15及铲耙12整体前移设定距离,同时完成巷道两侧落煤的前移集聚;
39.步骤六:控制弯臂摆转驱动油缸16的活塞杆伸出,直到铲耙12向内翻转至设定角度,使巷道两侧已经前移集聚的落煤被推移到侧铲板8及中间铲板7的前方;
40.步骤七:控制铲耙俯仰驱动油缸17的活塞杆回缩,直到铲耙12向上抬起至设定角度;
41.步骤八:控制弯臂摆转驱动油缸16的活塞杆回缩,直到铲耙12向外翻转回初始位置;
42.步骤九:控制控制滑座体滑移驱动油缸的活塞杆回缩,直到滑座体15及铲耙12整体后移回初始位置;
43.步骤十:控制铲耙俯仰驱动油缸17的活塞杆伸出,直到铲耙12向下回落到巷道底板;
44.步骤十一:重复步骤一至步骤十,实现落煤的全断面铲运。
45.实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等效实施或变更,均包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1