隧道智能减灾、救援设备及其工作方法
1.本发明涉及隧道减灾、救援技术领域,具体为一种隧道智能减灾、救援设备及其工作方法。
背景技术:
2.目前我国长大隧道逐年增多,传统的隧道安全管理和事件救援技术及时性、主动性和智能化远不能满足隧道安全畅通、救援的需要,目前隧道出现安全事故只能依赖路政、消防等应急人员带着救援设备进入隧道救援,救援响应速度慢,并且由于隧道的地形的限制,外部救援设备进入难度较大,也会影响救援速度。
技术实现要素:
3.本发明的目的在于提供一种救援速度快的隧道智能减灾、救援设备,以及提供一种隧道智能减灾、救援设备的工作方法。
4.为实现上述目的,本发明提供如下技术方案:
5.一种隧道智能减灾、救援设备,包括智能控制系统和分别设置在遂道内的道路两侧的两个导轨总成,两个导轨总成的两端分别伸出遂道的两端外,遂道内的道路通行空间上方设置有自运动装置,自运动装置的两端可移动的设置在两个导轨总成上,自运动装置的下侧设置有旋转机械臂清障装置,自运动装置上还设置有除冰装置和灭火装置,自运动装置、旋转机械臂清障装置、除冰装置和灭火装置均由智能控制系统控制。
6.优选的,所述的导轨总成包括上下并列设置的滑轨和齿条,自运动装置包括支架和设置在支架两端的滑块,滑块与滑轨滑动连接,滑块上固定有纵向驱动电机,纵向驱动电机连接有传动齿轮,传动齿轮与齿条相啮合,纵向驱动电机和传动齿轮组成第一驱动机构。
7.优选的,所述的除冰装置可沿支架长度方向移动的设置在支架上,支架与除冰装置之间设置有驱动除冰装置在支架上移动的第二驱动机构,所述的除冰装置包括承载滑板、除冰液储存罐、水泵和喷头,除冰液储存罐和水泵固定在承载滑板上,水泵连接除冰液储存罐和喷头。
8.优选的,所述的旋转机械臂清障装置和支架之间设置有驱动旋转机械臂清障装置在支架上移动的第三驱动装置,旋转机械臂清障装置包括安装板和转动设置在安装板下方的伸缩杆和固定在伸缩杆下端的机械爪,安装板和伸缩杆之间设置有驱动伸缩杆转动的第四驱动机构,伸缩杆为电动伸缩杆、气动伸缩杆或液压伸缩杆,旋转机械臂清障装置有四个,两个旋转机械臂清障装置共用一个安装板并形成一个旋转机械臂清障组,两个旋转机械臂清障组横向移动的设置在支架上。
9.优选的,所述的灭火装置包括气动伸缩杆、旋转平台、两个储藏罐、喷粉气泵、水泵和两组喷头,旋转平台固定在气动伸缩杆的下端,两个储藏罐设置在旋转平台上侧并分处在气动伸缩杆的两侧,喷粉气泵和水泵均固定在旋转平台的下侧,喷粉气泵和水泵分别连接一个储藏罐和一组喷头,气动伸缩杆的上端转动设置在支架上,气动伸缩杆与支架之间
设置有驱动气动伸缩杆转动的第五驱动机构。
10.优选的,所述第二驱动机构和第三驱动机构为直线丝杠电机驱动组件或为电机驱动的丝杠丝母机构,第四驱动机构和第五驱动机构为电机驱动的齿轮组机构。
11.优选的,所述的直线丝杠电机驱动组件包固定在支架上丝杠和设置在丝杠上的直线丝杠电机,被驱动件设置在直线丝杠电机上,所述的电机驱动的丝杠丝母机构包括转动设置在支架上的丝杠、连接在丝杠上的丝母和设置在支架上并驱动丝杠转动的电机,被驱动件设置在丝母上,支架上固定有与丝杠平行的导向杆,丝母与导向杆滑动连接。
12.优选的,所述的智能控制系统包括供配电模块、智能识别处理模块、智能避障模块、智能探测模块、智能定位模块和远程的中控系统;供配电模块用于为所有用电元件供电;智能识别处理模块用于控制智能避障模块、智能探测模块、智能定位模块、自运动装置、旋转机械臂清障装置、除冰装置和灭火装置,中控系统用于控制智能识别处理模块;
13.智能避障模块包括安装于自运动装置上的毫米波雷达、视觉传感器、信息处置单元和声光警示灯,毫米波雷达、视觉传感器通过信息处置单元与智能识别处理模块相连接;
14.智能探测模块包括安装于自运动装置上的高清摄像头、烟雾传感器、温度传感器、可燃气体浓度传感器和红外遥感结冰传感器,智能探测模块与智能识别处理模块通过信号及电缆线相连接;
15.智能定位模块包括安装于自运动装置上且与智能识别处理模块连接的高清摄像头、北斗定位端和微波雷达。
16.一种隧道智能减灾、救援设备的工作方法,采用本发明任何一项所述的隧道智能减灾、救援设备。
17.一种隧道智能减灾、救援设备的工作方法,采用前述的隧道智能减灾、救援设备,所述的工作方法为:自运动装置在遂道中运动,智能探测模块在遂道中探测,智能识别处理模块根据智能探测模块的数据分析着火、隧道壁结冰和故障车辆三种异常情况,当出现异常情况,智能识别处理模块控制自运动装置停止,智能定位模块对自运动装置进行定位和对异常点进行测距,当出现着火时,智能识别处理模块控制灭火装置灭火,当出现隧道壁结冰时,智能识别处理模块控制除冰装置除冰,当出现故障车辆时,智能识别处理模块控制的两组旋转机械臂清障组移动到故障车辆的两侧的上方,再控制伸缩杆伸出,再控制机械爪转动到故障车辆的下方,智能识别处理模块根据智能避障模块的检测信息避开道路上的其它车辆和障碍并控制自运动装置运动将故障车辆拖出遂道。
18.本发明的有益效果是:本发明通过在遂道内架设可以遂道中自由行走的自运动装置,使得可以对遂道内的情况进行巡视,能及时发现异常情况,并且在自运动装置上设置有旋转机械臂清障装置、灭火装置和除冰装置,能够及时将故障车辆拖出遂道,并且能自动灭火和除冰,由于自运动装置是在遂道内的道路通行空间上方运行,自运行时不受遂道内车辆的影响,救援速度快。
附图说明
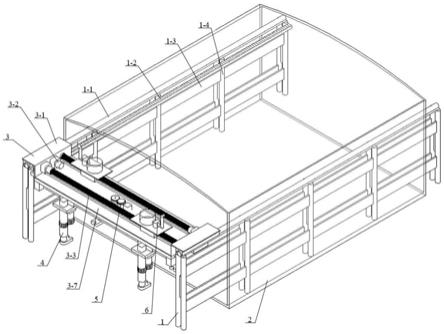
19.图1是本发明的整体结构示意图;
20.图2是本发明的局部结构示意放大图;
21.图3是本发明的件5结构示意放大图;
22.图4是本发明的件4的结构示意放大图;
23.图5是本发明的件6的结构示意放大图;
24.图6是本发明的智能控制系统控制的控制原理图;
25.图中:1、导轨总成,1
‑
1、滑轨,1
‑
2、齿条,1
‑
3、纵梁,1
‑
4、立柱,2、遂道,3、自运动装置,3
‑
1、滑块,3
‑
2、纵向驱动电机,3
‑
3、第一丝杠,3
‑
4、第一导杆,3
‑
5、电机,3
‑
6、第二导杆,3
‑
7、支架,3
‑
8、第二丝杠,4、旋转机械臂清障装置,4
‑
1、安装板,4
‑
2、气泵,4
‑
3、气动伸缩杆,4
‑
4、环形齿轮,4
‑
5、齿轮,4
‑
6、电机,4
‑
7、丝杠电机,4
‑
8、机械爪,5、灭火装置,5
‑
1、旋转电机,5
‑
2、齿轮,5
‑
3、气泵,5
‑
4、气动伸缩杆,5
‑
5、旋转平台,5
‑
6、水泵,5
‑
7、喷头,5
‑
8、喷粉气泵,5
‑
9、储藏罐,6、除冰装置,6
‑
1、喷头,6
‑
2、水泵,6
‑
3、除冰液储存罐。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.如图1
‑
4所示的隧道智能减灾、救援设备,包括智能控制系统和分别设置在遂道2内的道路两侧的两个导轨总成1,两个导轨总成1的两端分别伸出遂道2的两端外,遂道2内的道路通行空间上方设置有自运动装置3,自运动装置3的两端可移动的设置在两个导轨总成1上,自运动装置3的下侧设置有旋转机械臂清障装置4,自运动装置3上还设置有除冰装置6和灭火装置5,自运动装置3、旋转机械臂清障装置4、除冰装置6和灭火装置5均由智能控制系统控制。
28.导轨总成1包括上下并列设置的滑轨1
‑
1和齿条1
‑
2,齿条1
‑
2安装在纵梁1
‑
3上,纵梁1
‑
3通过多个立柱1
‑
4支撑在遂道2中,自运动装置包括支架3
‑
7和设置在支架3
‑
7两端的滑块3
‑
1,滑块3
‑
1与滑轨1
‑
1滑动连接,滑块3
‑
1上固定有纵向驱动电机3
‑
2,纵向驱动电机3
‑
2连接有传动齿轮,传动齿轮与齿条1
‑
2相啮合,纵向驱动电机3
‑
2和传动齿轮组成第一驱动机构。
29.除冰装置6可沿支架3
‑
7长度方向移动的设置在支架3
‑
7上,支架3
‑
7与除冰装置6之间设置有驱动除冰装置6在支架3
‑
7上移动的第二驱动机构,所述的除冰装置6包括承载滑板6
‑
4、除冰液储存罐6
‑
3、水泵6
‑
2和喷头6
‑
1,除冰液储存罐6
‑
3和水泵6
‑
2固定在承载滑板6
‑
4上,水泵6
‑
2连接除冰液储存罐6
‑
3和喷头6
‑
1。
30.旋转机械臂清障装置4和支架3
‑
7之间设置有驱动旋转机械臂清障装置4在支架3
‑
7上移动的第三驱动装置,旋转机械臂清障装置4包括安装板4
‑
1和转动设置在安装板4
‑
1下方的气动伸缩杆4
‑
3和固定在气动伸缩杆4
‑
3下端的机械爪4
‑
8,安装板4
‑
1和气动伸缩杆4
‑
3之间设置有驱动气动伸缩杆4
‑
3转动的第四驱动机构,气动伸缩杆4
‑
3连接有气泵4
‑
2,旋转机械臂清障装置4有四个,两个旋转机械臂清障装置4共用一个安装板4
‑
1并形成一个旋转机械臂清障组,两个旋转机械臂清障组横向移动的设置在支架3
‑
7上。
31.灭火装置5包括气动伸缩杆5
‑
4、旋转平台5
‑
5、两个储藏罐5
‑
9、喷粉气泵5
‑
8、水泵5
‑
6和两组喷头5
‑
7,旋转平台5
‑
5固定在气动伸缩杆5
‑
4的下端,两个储藏罐5
‑
9设置在旋转平台5
‑
5上侧并分处在气动伸缩杆5
‑
4的两侧,喷粉气泵5
‑
8和水泵5
‑
6均固定在旋转平台5
‑
5的下侧,喷粉气泵5
‑
8和水泵5
‑
6分别连接一个储藏罐5
‑
9和一组喷头5
‑
7,两个储藏罐5
‑
9分别用于储存粉状灭火剂和液体灭火剂,可以根据需要选用不同的灭火剂,并且可以旋转喷洒,扩大喷洒覆盖面积,气动伸缩杆5
‑
4的上端转动设置在支架3
‑
7上,气动伸缩杆5
‑
4与支架3
‑
7之间设置有驱动气动伸缩杆5
‑
4转动的第五驱动机构。支架3
‑
7上设置有给气动伸缩杆5
‑
4供气的气泵5
‑
3。
32.第二驱动机构包括转动设置在两个滑块3
‑
1之间的第一丝杠3
‑
3,设置在两个滑块3
‑
1之间并与第一丝杠3
‑
3平行的第一导杆3
‑
4,滑块上设置有驱动第一丝杠3
‑
3转动的电机3
‑
5,承载滑板6
‑
4与第一导杆3
‑
4滑动连接,承载滑板6
‑
4和第一丝杠3
‑
3螺纹连接。
33.第三驱动机构包括固定设置在两个滑块3
‑
1之间的第二丝杠3
‑
8,设置在两个滑块3
‑
1之间并与第二丝杠3
‑
8平行的第二导杆3
‑
6,第二丝杠3
‑
8和第二导杆3
‑
6上设置有丝杠电机4
‑
7,丝杠电机4
‑
7是一种能在丝杠上做直线运动的电机,属于现有技术,旋转机械臂清障装置4的安装板4
‑
1与丝杠电机4
‑
7固定连接。
34.第四驱动机构包括电机4
‑
6、齿轮4
‑
5和环形齿轮4
‑
4,环形齿轮4
‑
4套在气动伸缩杆4
‑
3的上端外,齿轮4
‑
5固定在电机4
‑
6主轴上,电机4
‑
6固定在安装板4
‑
1上。电机4
‑
6启动,带动齿轮4
‑
5和环形齿轮4
‑
4驱动气动伸缩杆4
‑
3转动,从而带机械爪4
‑
8转动,实现对车辆底盘的钩取或脱离。
35.第五驱动机构包括旋转电机5
‑
1、齿轮5
‑
2和环形齿轮,具体结构与第四驱动机构相同。旋转电机5
‑
1固定在支架3
‑
7上。
36.如图6所示,所述的智能控制系统包括供配电模块、智能识别处理模块、智能避障模块、智能探测模块、智能定位模块和远程的中控系统;供配电模块用于为所有用电元件供电;智能识别处理模块用于控制智能避障模块、智能探测模块、智能定位模块、自运动装置、旋转机械臂清障装置、除冰装置和灭火装置,中控系统用于控制智能识别处理模块;
37.智能避障模块包括安装于自运动装置上的毫米波雷达、视觉传感器、信息处置单元和声光警示灯,毫米波雷达、视觉传感器通过信息处置单元与智能识别处理模块相连接;毫米波雷达和视觉传感器用于检测道路上车辆信息,视觉传感器采用摄像机,声光警示灯采用多级警示,信息处置单元根据毫米波雷达和视觉传感器检测信息控制声光警示灯的警示级别并将检测信息上传智能识别处理模块。
38.智能探测模块包括安装于自运动装置上的高清摄像头、烟雾传感器、温度传感器、可燃气体浓度传感器和红外遥感结冰传感器,智能探测模块与智能识别处理模块通过信号及电缆线相连接;
39.智能定位模块包括安装于自运动装置上且与智能识别处理模块连接的高清摄像头、北斗定位端和微波雷达。通过北斗定位端定位,通过微波雷达测距。通过高清摄像头拍摄事故状态。
40.供配电模块有多路空气开关、滑触线、蓄电池、24v电源、供电线、信号线组成,为其他各个模块和装置供能。供配电模块的多路空气开关安装在导轨总成1的立柱1
‑
4的配电箱内,滑触线通过瓷绝缘子安装在纵梁1
‑
3上,前端与配电空气开关相连,并与支架3
‑
7上的电缆通过滑触头连接,为支架3
‑
7上的各个模块或装置供电,各装置主信号线缆通过线槽固定安装在纵梁和立柱上,分支线缆通过固定在支架上的线槽到达各功能模块。
41.智能探测模块悬挂安装在支架3
‑
7中部位置的下侧面上,高清摄像头、烟雾传感
器、温度传感器、可燃气体浓度传感器、红外遥感结冰传感器通过螺栓固定于支架3
‑
7上,并于供配电模块、智能识别处理模块通过信号及电缆线相连接,传感器获取的信息通过智能识别处理模块的智能算法进行火灾险情和类型的识别判断,识别判断的智能算法采用现有技术。通过高清摄像头的视频图像自动识别发生火灾车辆类型,并配合烟雾传感器和可燃气浓度传感器,为普通火灾或者化学品火灾识别提供数据支持;智能识别处理模块对火灾探测装置的数据信息进行分析识别,并根据识别的火灾信息触发现场报警并上传给中控系统,由中控系统传达指令给智能识别处理模块并传达给灭火装置;
42.一种隧道智能减灾、救援设备的工作方法,采用前述的隧道智能减灾、救援设备,所述的工作方法为:自运动装置在遂道中运动,进行定期巡检或异常情况巡检,智能探测模块在遂道中探测,智能识别处理模块根据智能探测模块的数据分析着火、隧道壁结冰和故障车辆三种异常情况(采用现有的分析方法),当出现异常情况,智能识别处理模块控制自运动装置停止,智能定位模块对自运动装置进行定位和对异常点进行测距,当出现着火时,智能识别处理模块控制灭火装置启动来灭火,智能识别处理模块根据起火的类型启用水泵或喷粉气泵,当出现隧道壁结冰时,智能识别处理模块控制除冰装置除冰,当出现故障车辆时,智能识别处理模块控制的两组旋转机械臂清障组移动到故障车辆的两侧的上方,先控制伸缩杆伸出,再控制机械爪转动到故障车辆的下方,两组旋转机械臂清障组从故障车辆的两侧将故障车辆固定住,智能识别处理模块根据智能避障模块的检测信息避开道路上的其它车辆和障碍并控制自运动装置运动将故障车辆拖出遂道。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1