适用于抽油杆作业系统的井口对中装置的制作方法
1.本发明涉及石油修井作业设备、尤其涉及抽油杆作业系统,具体地涉及一种能够适用于抽油杆作业系统的、用于检测抽油杆的杆径规格且同时使抽油杆对准井口基准的井口对中装置。
背景技术:
2.现在市场上所使用的修井作业系统的井口设备基本上均为半自动化的,常常需要人工介入作业流程,且现有的井口设备通常只能适应油管一种作业对象,已有的井口模块无法完成对抽油杆的作业,因而抽油杆基本上由人工操作,导致修井作业的自动化程度较低,作业效率低。为了使井口设备能够完成对抽油杆的自动化作业,需要专门的抽油杆作业系统。现行抽油杆通常具有多种规格,抽油杆的规格均由人工识别,人工操作强度大,同时现场作业环境具有一定风险,影响油田作业的安全性。
3.在自动化设备进行作业时,针对每种抽油杆的规格需要对应规格的装置进行处理,因而需要在抽油杆作业系统进行自动化作业之前检测出杆体规格并反馈给作业控制系统,使得检测杆体规格的重要性非常大。另外,在抽油杆作业系统进行作业时,需要将抽油杆与井口基准(或井口中心位置)精确地对准,因而还存在高效地将抽油杆对准井口基准的需求。
4.现有技术中已知了一些用于抽油杆的对中装置。例如,中国专利 cn202417331u公开了一种抽油杆用轴向可平移式自动对中旋转接头,其能够实现与抽油杆的方便对接、可靠地传递扭矩且能够自动对中;中国专利cn210685883u公开了一种抽油杆井口对中保护防偏磨光杆扶正器,其能始终保证光杆居中地运行,降低了光杆和盘根的损耗。
5.然而,现有技术中的这些适用于抽油杆的对中装置涉及的结构部件较多、操作较为复杂,人工操作强度仍然较大,同时这些装置未能集成有对抽油杆的杆径规格进行检测的任何测量装置,使得不能适用于自动化的抽油杆作业系统中,导致整个作业设备的作业效率低,且安全性不高。
技术实现要素:
6.因此,本发明就是基于这样的背景而提出的,其旨在提出一种适用于抽油杆作业系统的井口对中装置,使得一方面能够对抽油杆的杆径规格进行检测以确定抽油杆杆体规格,且另一方面使抽油杆能够高效地对准井口基准,同时省去了现有技术中复杂的用于对中的结构部件、可靠性更高。
7.本发明提出了一种适用于抽油杆作业系统的井口对中装置,该井口对中装置集成有用于测量抽油杆的直径规格的测量单元以及使抽油杆能够对准井口基准的对中单元。
8.有利地,所述井口对中装置包括基座、布置在所述基座上的导轨以及能够在致动机构的作用下沿所述导轨相对运动的第一滑块和第二滑块,所述第一滑块和第二滑块共同限定有供抽油杆穿过的开放空间,其中,所述测量单元包括传感器,所述传感器响应于所述
第一滑块和所述第二滑块的相对移动来确定所述抽油杆的直径。
9.有利地,所述致动机构为液压油缸,所述液压油缸的活塞杆连接至连杆机构,以使得所述活塞杆的往复直线运动经由所述连杆机构转变成所述第一滑块和第二滑块分别沿相反的方向的平移运动。
10.有利地,所述连杆机构包括设置有第一枢转臂和第二枢转臂的第一转轴、设置有第三枢转臂的第二转轴以及连杆,其中,所述活塞杆经由所述第一枢转臂枢转地连接至所述第一转轴;所述连杆的第一端枢转地连接至所述第二枢转臂且所述连杆的第二端枢转地连接至所述第三枢转臂,所述第一转轴上设置有第一摆臂,所述第二转轴上设置有第二摆臂,所述第一摆臂的自由端可转动地连接至所述第一滑块,所述第二摆臂的自由端可转动地连接至所述第二滑块;所述活塞杆的往复直线运动被转变成所述第一转轴和所述第二转轴沿相反的方向的转动,使得最终经由所述第一摆臂和第二摆臂带动所述第一滑块和第二滑块分别沿相反的方向平移运动。
11.有利地,所述传感器为拉丝传感器,所述拉丝传感器根据所述第一滑块和所述第二滑块的相对移动行程来确定所述抽油杆的直径。
12.有利地,所述测量单元还包括第一测定轴和第二测定轴,所述第一测定轴和所述第二测定轴分别与所述第一滑块和所述第二滑块固定连接以便能够随所述第一滑块和第二滑块进行平移运动;其中,从所述传感器拉出的钢丝绕设在设置于所述第一测定轴的端部的第一钢丝滑轮上且钢丝的末端固定地连接至所述第二测定轴的端部。
13.有利地,在所述基座上还设置有邻近所述传感器的钢丝出口处的第二钢丝滑轮以对钢丝提供运动导向。
14.有利地,所述第一滑块和所述第二滑块上各设有一对连接突耳,以在其中分别接纳第一摆臂和第二摆臂,所述第一摆臂和所述第二摆臂上分别设置有一长圆形孔,所述长圆形孔与所述连接突耳上的轴孔对准以供相应的测定轴穿过。
15.有利地,所述第一测定轴和所述第二测定轴上均设置有能够在所述长圆形孔内滑动的滚轮。
16.有利地,所述对中单元包括分别设置在所述第一滑块和所述第二滑块上的第一插接部和第二插接部,所述第一插接部和所述第二插接部分别限定有第一弧形部段和第二弧形部段,所述第一弧形部段和所述第二弧形部段共同限定所述开放空间。
17.有利地,所述对中单元还包括分别设置在所述第一滑块和所述第二滑块上的第一滚动体和第二滚动体,在所述第一滑块与所述第二滑块朝向彼此移动时,所述第一插接部和所述第二插接部彼此插接接合以缩小所述开放空间并带动所述抽油杆朝向井口基准运动,直至所述第一滚动体和第二滚动体夹紧所述抽油杆。
18.有利地,所述第一滚动体和所述第二滚动体在所述抽油杆上下升降运动时转动以提供运动导向。
19.根据本发明的井口对中装置,将用于检测抽油杆直径的检测装置与用于使抽油杆对准井口基准的对中装置集成在一起,整个装置涉及简单的结构,能够被有效地集成到自动化的抽油杆作业系统中,以实现抽油杆的作业自动化。
附图说明
20.通过以下参照附图的描述,本发明的上述和其它特征和优点将变得更加容易理解,其中:
21.图1示出了根据本发明实施例的适用于抽油杆作业系统的井口对中装置的立体示意图;
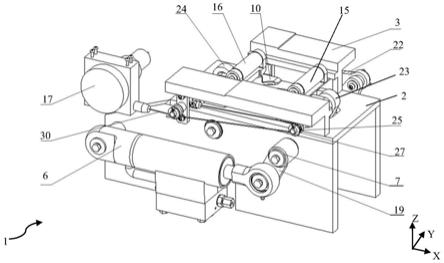
22.图2示出了图1中的井口对中装置的运动传递链,其中未示出基座以更清楚地示出包括在该井口对中装置中的运动结构;
23.图3以局部示意图示出了测定轴的安装状态;
24.图4以局部示意图示出了安装在图1中的井口对中装置的基座上的导轨,其中部分结构未被示出以更清楚地示出导轨与布置在基座上的滑块之间的连接关系;
25.图5以局部示意图示出了分别布置在相对的滑块上的彼此插接接合的插接部,图中所示的插接部处于插接状态;以及
26.图6a和图6b分别示出了插接部彼此远离状态(即打开待机状态)和插接部彼此接合状态(即闭合工作状态)的井口对中装置的示意图。
具体实施方式
27.下面结合附图和具体实施例进一步详细地说明本发明。在以下描述中可能使用的关于方位的说明,比如“上”、“下”、“内”、“外”等,除非具有明确说明,仅为了方便描述,而无欲对发明技术方案形成任何限定。另外,在下文中还使用了例如“第一”、“第二”等术语来描述本技术的元件,这些术语仅用于区分各个元件,而无欲限制这些元件的本质、序列、顺序或数目。
28.应知晓的是,本发明的井口对中装置处于抽油杆系统的井口设备中,其上部连接至抽油杆系统的井口设备的定位块装置,下部连接至抽油杆系统的井口设备的刮油装置。
29.图1示出了根据本发明实施例的适用于抽油杆作业系统的井口对中装置1,该井口对中装置1集成有用于测量抽油杆(未示出)的直径规格的测量单元以及使抽油杆能够对准井口基准的对中单元。
30.根据本发明一具体实施例,该井口对中装置1包括基座2、布置在所述基座2上的导轨3以及能够沿所述导轨3相对运动的第一滑块4和第二滑块5(见图3和4),所述第一滑块4和第二滑块5共同限定有供抽油杆穿过的开放空间。第一滑块4和第二滑块5能通过致动机构、特别是经由连杆机构被驱动至彼此靠近(即图6b中的闭合工作位置)或彼此远离(即图6a中的打开待机位置)。在闭合工作位置,包括在第一滑块4上的第一插接部9和包括在第二滑块5上的第二插接部10彼此插接接合以形成长形的开放空间(参见图6b)。尤其参见图5,第一插接部9下方设置有用于接纳第二插接部10的贯通部11,第二插接部10上方设置有用于接纳第一插接部9的凹部12。当然,本领域内已知的其它接合装置均是可行的,只要能够实现上文所述的功能即可。
31.继续参见图5,有利地,第一插接部9和第二插接部10上分别设置有第一弧形部段13和第二弧形部段14,使得能够在插接接合期间带动处于长形的开放空间内的抽油杆朝向井口基准移动,以起到对抽油杆的辅助对中作用。更有利地,参见图4,在所述第一滑块4和第二滑块5上还分别设置有第一滚动体15和第二滚动体16,在所述第一滑块4与所述第二滑
块5朝向彼此移动时,所述第一插接部9和所述第二插接部10彼此插接接合以缩小开放空间并带动所述抽油杆朝向井口基准运动,直至所述第一滚动体15和第二滚动体16夹紧所述抽油杆以限制所述抽油杆在所述第一滑块4和所述第二滑块5的平移运动方向(即图1中所示的x方向)上的移位。第一和第二滚动体以及第一和第二弧形部段共同用于构成抽油杆的对中单元,其能够实现对抽油杆在x方向的定位以及在y方向上的粗定位。通过这种对中单元与布置在井口对中装置1上方的用于抽油杆作业系统的定位块装置(未示出)一起最终完成对抽油杆的准确对中。定位块装置通常设置有一个带喇叭口形状的导正部件,其能够实现抽油杆在y方向上的精确定位。
32.如背景技术中提及的,为了使上述井口对中装置1能够适用于自动化的抽油杆作业系统,需要对抽油杆的规格进行检测,使得能够将抽油杆的规格信息准确且及时地反馈给作业系统,从而选择适合对应杆径规格的操作装置。因此,在上述装置中还同时集成了用于测量抽油杆的直径的测量单元。该测量单元包括用于测定抽油杆直径的传感器,该传感器例如为拉丝传感器17。
33.如图1和2所示,致动机构例如为液压油缸6,该液压油缸6的活塞杆18连接至连杆机构,以使得所述活塞杆18的往复直线运动经由所述连杆机构转变成所述第一滑块4和第二滑块5分别沿相反的方向的平移运动。当然,本领域中能够实现致动作用的其它形式的致动机构也是可行的。接下来,将详细描述如何利用连杆机构实现对抽油杆直径的检测过程。
34.具体地,尤其参见图2,所述连杆机构包括设置有第一枢转臂19和第二枢转臂20的第一转轴7、设置有第三枢转臂21的第二转轴8以及连杆 22,其中,所述活塞杆18经由所述第一枢转臂19枢转地连接至所述第一转轴7;所述连杆22的第一端枢转地连接至所述第二枢转臂20且所述连杆22的第二端枢转地连接至所述第三枢转臂21,所述第一转轴7上设置有第一摆臂23,所述第二转轴8上设置有第二摆臂24,所述第一摆臂23 的自由端可转动地连接至所述第一滑块4,所述第二摆臂24的自由端可转动地连接至所述第二滑块5。因此,所述液压油缸6的活塞杆18的往复直线运动被转变成所述第一转轴7和所述第二转轴8沿相反的方向的转动,使得最终经由所述第一摆臂23和第二摆臂24带动所述第一滑块4和第二滑块5分别沿相反的方向平移运动。
35.为了实现对抽油杆的直径检测,测量单元还包括第一测定轴25和第二测定轴26,所述第一测定轴25和所述第二测定轴26分别与所述第一滑块4和所述第二滑块5固定连接以便能够随所述第一滑块4和第二滑块5进行平移运动。从所述传感器拉出的钢丝30绕设在设置于所述第一测定轴 25的端部的第一钢丝滑轮27上且钢丝的末端固定地连接至所述第二测定轴26的端部,第一钢丝滑轮27在所述第一测定轴的端部处能够自由转动。另外,如图2所示,在所述基座上还设置有邻近所述传感器的钢丝出口处的第二钢丝滑轮28以对钢丝提供运动导向。
36.如此,当第一滑块4和第二滑块5在第一摆臂23和第二摆臂24的带动下经由致动机构(如液压油缸)的致动作用朝向彼此移动至如图6b所示的闭合工作状态时,一端绕设在第一测定轴25的端部的钢丝滚轮上且另一端固定在第二测定轴26的端部的钢丝将从传感器的钢丝出口处朝传感器内缩回一定长度,该长度取决于第一滑块4和第二滑块5相对移动行程。如此,传感器便能够根据所述第一滑块4和所述第二滑块5的相对移动行程来测定出抽油杆的直径。
37.由上可以看出,同时被集成在井口对中装置中的测量单元和对中单元彼此之间是相互关联的或相互联动的。
38.另外,参见图3,第一滑块4和第二滑块5上各设有一对连接突耳29,以在其中分别接纳第一摆臂23和第二摆臂24,所述第一摆臂和所述第二摆臂上分别设置有一长圆形孔(见图2),该长圆形孔与连接突耳29上的轴孔对准以供相应的测定轴穿过。利用该长圆形孔,第一和第二滑块能够在打开或闭合时适应相应摆臂的位置变化。
39.有利地,第一测定轴25和第二测定轴26上可设置有能够在所述长圆形孔内滑动的滚轮(图中未示出),以减小第一滑块和第二滑块借助于第一和第二摆臂进行运动过程中在相应摆臂的长圆形孔中存在的摩擦。
40.根据本发明的井口对中装置,使得一方面能够对抽油杆的杆径规格进行检测,且另一方面能够高效地使抽油杆对准井口基准,且整个装置涉及简单的结构,能够被有效地集成到自动化的抽油杆作业系统中,省去人工操作以实现抽油杆作业的完全自动化和智能化。
41.应当指出,上面说明的实施例仅应被视为示例性的,本发明不限于这些实施例。通过考虑本说明书的内容,本领域技术人员可在不偏离本发明的范围或精神的情况下做出多种改变和变型。本发明的真实范围由所附权利要求以及等同方案限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1